基于智能控制的直驱风电机组模拟实验平台及算法研究
2023-07-17韦桥斌


摘 要:本文设计一套2kW直驱型风电机组模拟实验系统,可以仿真各种风况下直驱风电机组运行特性。针对直驱风电机组,提出了基于Matlab优化的变增益变桨控制策略。算例分析表明所提控制算法能够起到抑制转速超调的作用。
关键词:风电机组;实验系统;变增益变桨控制
1 简介
通过直驱机组实验系统,不仅可以降低不成熟控制实验安全隐患的风险,也可以解决实际风场中由于风速随机性难以开展实验的问题[13,5]。
2 实验系统的结构
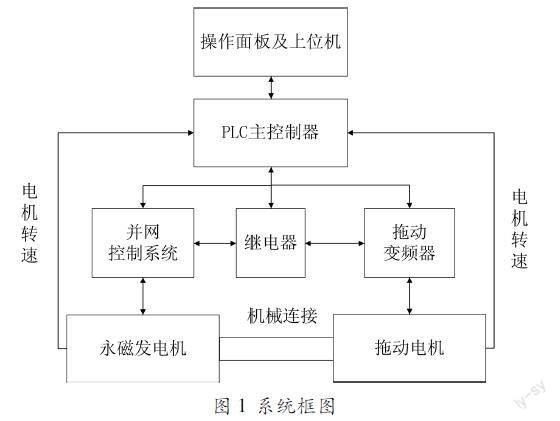
本文设计一套由PLC主控系统、模拟风轮系统、永磁发电机系统、操作面板系统组成的2kW直驱机组物理实验系统。如图1所示,操作面板系统主要进行模式切换、启动、停机等工作。PLC主控系统主要进行智能算法运行,发出操作指令。模拟风轮系统主要接受PLC或操作面板发出的操作指令,产生响应并反馈给PLC。永磁发电机系统主要由拖动电机与永磁发电机机械组成。
3 算法设计
主程序控制流程如图2所示,智能算法由电磁转矩控制、桨距角控制和滤波器三部分组成。
3.1 电磁转矩控制
直驱型发电机电磁转矩方程[4]:
Te=32n·φPM·isq(1)
式(1)中,φPM为永磁体产生的磁链,isq为q轴电流,n为发电机转子的极对数。电磁转矩Te与q轴电流分量成正比关系。按照预先设定的工作点计算出电磁转矩Te,再反推出isq。
如图3所示,当机组在高于额定工作点运行,机组电磁转矩Te维持在额定转矩点。在额定工作点以下运行,电磁转矩Te在线ABCD上运行[68]。
当转速位于BC段时风电机组追踪最佳叶尖速比λopt。
Kopt=ρπR5Cpmax2λopt3G3(2)
Topt=Koptω2(3)
式中,ω为发电机角速度;R为叶轮半径;G为齿轮箱速比;Kopt为转矩最佳控制系数[911]。
3.2 桨距角控制
当来流风速低于额定风速时,风电机组桨距角追踪最优桨距角;高于额定风速时,通过变增益PI控制使控制器参数追踪桨距角[912]。
PI变换传递函数:
Cs=β(s)ωerr(s)=Kp2+Ki2s(4)
式中,Kp2和Ki2为PI系数。
直驱式风电机组模型的SYSTURB结构通过Bladed中的线性化处理得到,以下方程系数矩阵即为该结构的A、B、C、D矩阵。
x·=Ax+Bu(5)
y=Cx+Du(6)
A=x·1x1 x·1x2 … x·1xn
x·nx1 x·nx2 … x·nxn B=x·1u1 x·1u2 … x·1um
x·nu1 x·nu2 … x·num(7)
C=y1x1 y1x2 … y1xn
ypx1 ypx2 … ypxnD=y1u1 y1u2 … y1um
ypu1 ypu2 … ypum(8)
高于額定风速时,通过计算每个风速点的参量Kp2和Ki2的最优值来实现风电机组变增益桨距角控制,保证发电机稳定输出额定功率。
3.3 滤波器
机组转速在运行中受风速影响随时变化,为减少冗余动作所采用低通滤波器形式为:
11+2ξsω+s2ω2(9)
4 计算结果对比分析
4.1 正常湍流模型
正常湍流模型下,平均风速为8m/s时控制算法结果与Bladed仿真对比如图4所示。
图4(a)为桨距角对比,低于额定风速时,两个仿真计算的桨距角都保持在最佳桨距角不变。
图4(b)为发电机转矩对比,可以看到与Bladed仿真得到的转矩相比,所提算法算的转矩更加平滑。因为引入滤波器减少了冗余动作。
图4(c)为发电机转速对比,可以看出PLC控制与Bladed仿真得到的转速基本一致。
图4(d)为发电量对比,可以看到控制算法仿真的发电量比Bladed仿真的发电量更加平滑。因为功率为转速与转矩的乘积,当转速一致时,转矩控制越平滑则功率控制越平滑。
4.2 极端相干阵风
风况:在5s内风速从13m/s提升到21m/s。
图5(a)为桨距角对比,与Bladed模拟仿真的桨距角相比控制算法所得的桨距角提前变化。这是由于不同控制算法下PI增益不同。
图5(b)为发电机转矩对比,可以看到高于额定风速时转矩均为额定转矩。与图3相一致。
图5(c)为发电机转速对比,与Bladed仿真结果相比控制算法计算的转速曲线与机组额定转速的偏差更小。说明所提变增益PI控制有效地规避了超速现象的发生。
图5(d)为发电量对比,与Bladed仿真结果相比控制算法计算的发电量与额定功率的偏差更小。因为功率为转速与转矩的乘积,转矩相同的情况下,转速越接近额定转速,输出功率越接近额定功率。
5 结论
本文设计了一套2kW直驱机组实验平台。该平台可以仿真模擬各种复杂风况下风电机组的运行特性;研究了最大风能追踪控制算法和变增益变桨控制算法;通过对比所提控制算法与Bladed仿真结果,证明了所提控制策略的有效性。
参考文献:
[1]李金鹏.基于PLC控制的风电机组物理实验平台研究与设计[D].华北电力大学,2013.
[2]王维.直驱能量转换系统实验平台的研究[D].内蒙古科技大学,2015.
[3]高剑.直驱永磁风力发电机设计关键技术及应用研究[D].湖南大学,2013.
[4]徐大平,柳亦兵,吕跃刚.风力发电原理[M].机械工业出版社,2011.
[5]李丹娜.风轮输出特性模拟实验平台的设计与研究[D].沈阳工业大学,2007.
[6]叶杭冶.风力发电机组监测与控制[M].机械工业出版社,2011.
[7]林志明,潘东浩,王贵子,等.双馈式变速变桨风力发电机组的转矩控制[J].中国电机工程学报,2009(32):118124.
[8]邢作霞,陈雷,徐健,等.大型变速变距风电机组转矩控制策略研究[J].太阳能学报,2012,33(5):738744.
[9]王斌,吴焱,丁宏,等.变速变桨距风电机组的高风速变桨距控制[J].电力自动化设备,2010,30(8):8183.
[10]王哲.大型风电机组变桨距控制策略研究[D].沈阳工业大学,2010.
[11]应有,许国东.基于载荷优化的风电机组变桨控制技术研究[J].机械工程学报,2011,47(16):106111.
[12]马蕊,鄂春良,付勋波,等.兆瓦级变速恒频风电机组变速变桨距控制技术研究[J].电气传动,2010,40(4):710.
作者简介:韦桥斌(1981— ),男,广西百色人,学士,中级工程师,研究方向:风力发电机组智能预警诊断。
