有人无人协同探测技术探索与时序设计
2023-07-15霍恩来
霍恩来
(中国电子科技集团公司第三十八研究所 合肥 230088)
0 引言
有人预警机基于其昂贵的价值,较大的雷达反射截面积,通常情况下,有人预警机很难深入重地进行预警探测。无人预警机在我军体系中,主要面向于海、空军装备的补充、升级,随着预警机技术及无人机系统的发展,未来较长的一段时间,体系装备中必然是有人机和无人机并存,并逐步转为全无人化。而现阶段,预警机存在反隐身、抗干扰、抗摧毁等能力不足,基于预警机和前置无人机的空基双/多基地体制的分布式预警系统,不仅可弥补我军无人预警的不足,还可利用无人机长航时、低成本等特点前突到敌方近区,实现防区扩大,提升我军预警能力[1]。
1 工作场景分析
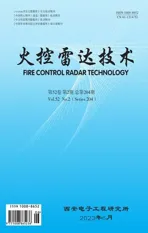
作战样式一:有人预警机与一架或多架无人预警机组成空中编队,按照特定的队形组阵拉开基线,利用不同入射角下隐身飞机RCS不同,实现超远程反隐身探测。
作战样式二:无人机静默前突,接收有人机雷达回波,提升装备安全性特性的同时提升预警距离。
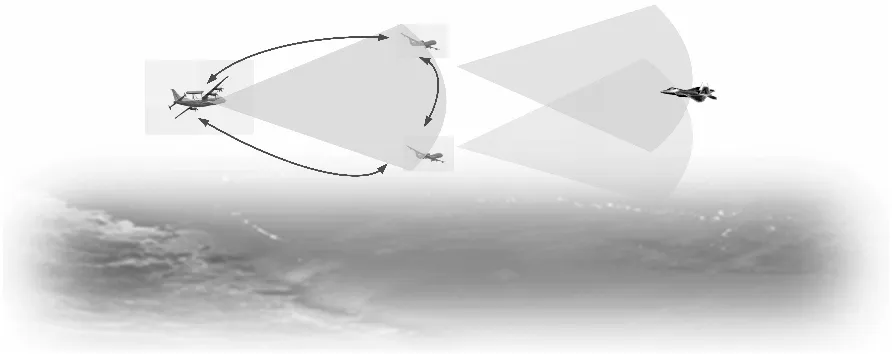
图1 有人/无人协同探测示意图
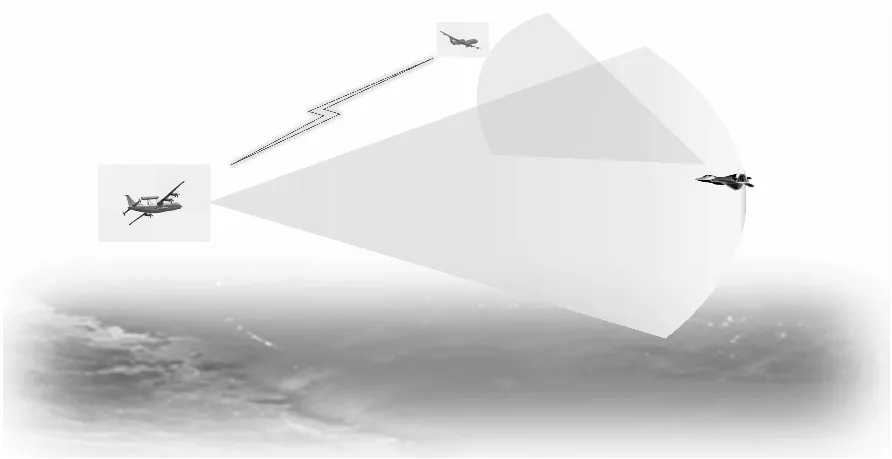
图2 无人前置静默接收
2 协同探测得益分析
双基地收发分置雷达接收目标回波信号功率为[2]
(1)
其中:PT为发射功率;GT为发射天线增益;GR为接收机天线增益;λ为波长;σB(β)为目标双基地RCS;RT为发射机到目标的距离;RR为接收机到目标的距离;Ls为系统损耗;(S/N)min为最小可检测信噪比;k为玻尔兹曼常数;Ts为接收机噪声温度,Bn为接收机检波前噪声带宽。
假设目标双基地雷达截面积为常数,可以得到双基地雷达最大距离kB,得到双基地最大卡西尼卵曲线表达式为
kB=(RTRR)max
(2)
为了绘制双基地雷达探测区域,建立如图3所示的极坐标系[3]。
图3 双机位置关系示意图
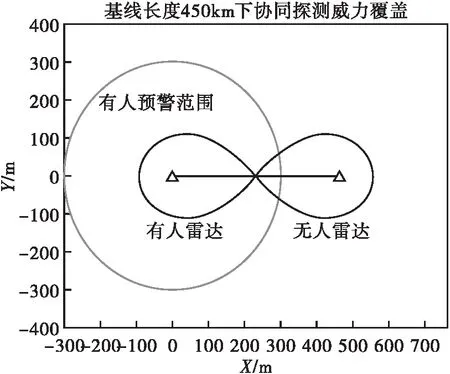
图5 基线450km的协同威力示意图

图6 基线300km的协同威力示意图
从几何关系可得出最大探测距离用极坐标表示:
(3)
综合式(2)和式(3),得到r的一元四次方程为
(4)
根据式(4),可以得出双基地雷达探测区的3种形态,下面结合某预警机系统参数,其威力为300km,发射增益为25dB,前置接收无人机的增益为20dB,仿真三种形态下的覆盖范围。
综上所述,采用无人机接收有人机发射的雷达信号,进行协同探测,在基线适当的情况下,可有效扩展探测威力。
3 工作模式设计
有人机雷达按照正常波束扫描,如上分析,单个无人机负责30°范围的协同探测,在有人机雷达第M号波束扫描到无人机负责的范围开始,无人机采用同时多波束(n个波束)追逐有人机波束,多波束覆盖期望扩展的预警范围,其波束扫描示意图如图7所示。
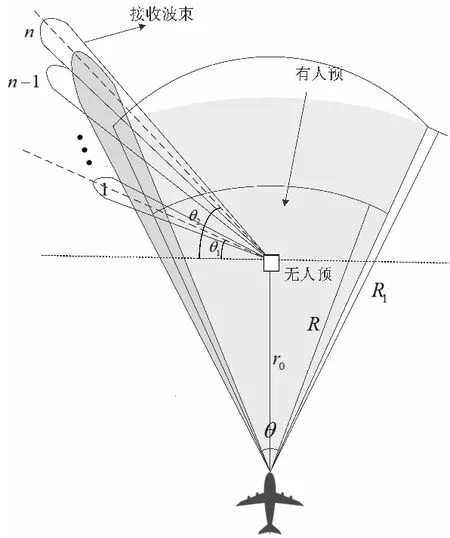
图7 波束扫描示意图
其中:r0为基线长度;R为有人机预警威力;R1为协同探测威力;θ为无人机协同负责角度范围。从几何关系可得出:
(5)
(6)
无人机接收波束在θ1、θ2之间排布。
时间同步是指,发射站朝着某个方向发射的时候,接收站要实时接收到发射参数并采取接收工作,需要结合通信延时以及基线长度等因素约定两站发射时刻。
机间通信延时预估t0、t1,时序设计如图8所示[4]。
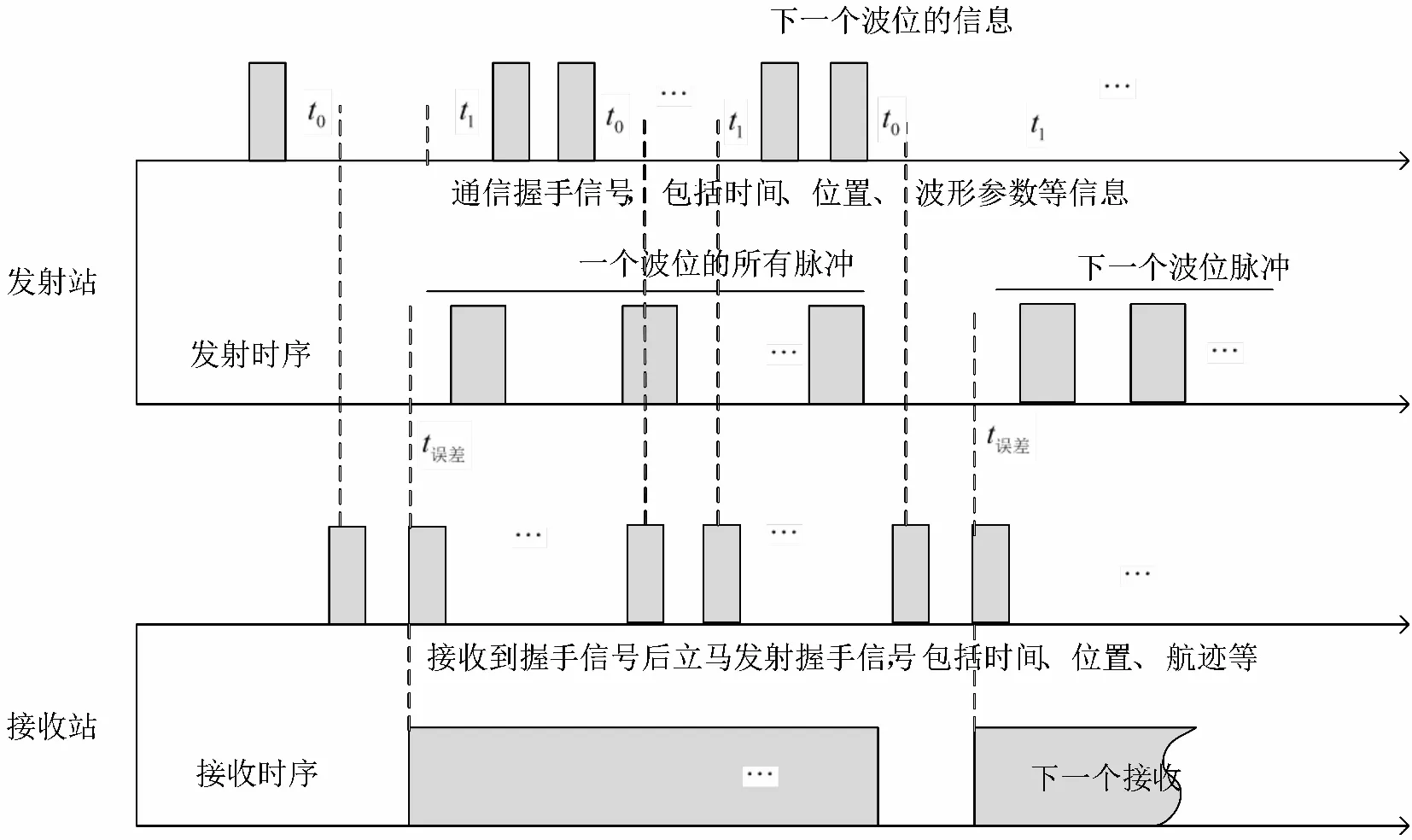
图8 工作时序图
显然,从时序分析看,只要稍作提前接收,时间误差只要不是太大是不会影响数据的接收与解算的,但是通信延时太大会极大影响发射波束的波速扫描周期。但是,在存在距离模糊的情况下,脉冲信号折叠严重,如何使脉冲在时域或者频域对齐变得尤为重要,时间同步进度不满足要求,会使信号无法对齐,不易实现相参处理。
空间同步是指,两站的实时位置需要相对准确,影响着接收波束指向以及三角距离解算,间接影响雷达测角和测距精度。此时,需要注意的是,时间的同步误差以及通信时间误差带来的位置误差同样会影响雷达的测角和测距精度。
这期间恶化的定位误差包括通信期间及等待期间位置变动补偿误差、两站自身的绝对定位误差。
(7)
此误差在计算测距精度中代替载机误差,其中有人和无人的载机误差为确定的,而走动补偿误差依赖于速度误差和延时误差,而GPS或者北斗的速度误差一般情况下很高,综合评估σ补偿误差小于飞机自身的定位误差σ平台,所以总的恶化误差可以表示为
(8)
这期间恶化的测角误差包括通信期间及等待期间位置变动补偿带来的角度误差、两站自身惯导的偏航角误差。
(9)
此误差在计算测角精度中代替载机误差,上述分析显示,σ补偿小于飞机自身的定位误差σ平台,而θ补偿主要由σ补偿引起,所有总的角度恶化误差可以表示为
(10)
频率或者相位同步是指收发单元应该具有相同的发射和接受频率,否则在产生信号的时候,会存在无法信号失配,相参效果不好,或者在截取脉冲长度的时候存在偏差,引起距离跨越。因为线性调频信号的多普勒容限比较大,所以基于线性调频信号的分布式雷达对频率同步要求不高,仅需要满足信号本身多普勒容限即可。
4 关键技术梳理
1)运动平台的“时间”同步问题
由于空空双/多基地雷达的收发两站不是固定不动的,而是两站同时运动,这不同于一般的地-地双基地雷达;这就对两站间的信息传递带来了新的技术问题,如何能够建成一条实时的通信数据链,成为实现空空双/多基地雷达合作探测的关键[5]。
由于收、发分置,所以必需知道发射触发的准确时间,给接收站提供时间基准,实现接收站的空间同步。
针对时间同步,可采用的方式有微波双向传输法、GPS共视法、卫星双向传输法。对于机载平台,想要实现信号级别协同,微波双向传输法的同步精度微妙量级较难达到其要求,GPS共视法实时性较差同样不可取,而卫星双向传输法精度高,但是复杂性和成本都相对较高,不太容易实现。
2)运动平台空间同步定位
空空双/多基地雷达的发射机是位于空中平台,其坐标瞬时变化,所以需随时确定出其坐标。对合作式空空双/多基地雷达,如果基线较短,两站定位可采用RTK定位,但基线大于100km,RTK基本失效,如何实时地确定发射站坐标信息并实时地送至接收站,从而解算出两站间的距离、方位是实现空空双基地三角形解算的关键[6]。
3)运动平台实时通信传输技术
对合作式空空双/多基地雷达,发射站的实时坐标信息、发射触发、频率码、工作方式等信息需传到接收站来实现两站同步工作,此外发射站与接收站还要进行双向数据传送,以便数据融合用。对于机载预警机发射站而言,由于发射站处于不停的运动状态,与无人机的通信链路要实时对准,才能确保接收站在任意位置均可于发站进行双向数据传送。另外,延时不能太大,否则影响扫描效率。
4)运动平台分布式杂波抑制及检测技术
机载分布式频谱特性不同于收发同置,其杂波分布并不相同,传统的杂波、干扰抑制手段可能并不适用,通过杂波仿真、算法设计等研究分布式杂波抑制及检测方法。
5 结束语
本文通过对空基分布式雷达协同探测机理进行分析,并对分布式协同雷达探测威力进行仿真,通过仿真可发现分布式探测确实可扩展预警探测威力。但是,想要实现空基协同探测,较多的问题需要解决,包括同步、通信等方面。在基线较远的情况下,高速通信手段以及同步手段将是后续研究的关键。