一种基于射频路由的电子对抗系统嵌入式软件框架设计
2023-07-15马若飞
马若飞 牛 栋 杨 柳
(西安电子工程研究所 西安 710100)
0 引言
随着电子技术的不断发展,在现代战争中,电子对抗的作用已经越来越重要。电子对抗系统是电磁信息空间生存和对抗的重要组成部分,是夺取电磁信息优势,保护己方电磁权限,削弱并破坏敌方电磁探测、通信、攻击能力的主要手段,可以对电子对抗系统需要保护的载体、平台或者区域进行有效的电磁防护[1-2]。电子对抗系统面临的空间电磁威胁越来越复杂,在传统的射频直通电子对抗系统中,天线前端数量急剧增加,导致系统的处理链路数也急剧增加,系统的硬件成本、调试成本和维护成本都相应的增加[3]。为了解决该问题,可以在系统设计时,将天线前端子系统和后续的微波收发、数字处理进行去耦合处理,在天线前端种类和数量增加的同时,后续的微波收发、数字处理的硬件模块数量和软件数量不需要对应的大量增加,就能满足系统后端处理的需求。在系统的微波链路设计时,射频路由子系统的引入,可以正好满足该设计需求。随着数字技术的不断发展,软件在整个电子对抗系统中的作用也越来越重要,软件无线电以及软件化雷达、软件化对抗等发展趋势也日渐清晰[4-5]。系统硬件设备创新应用的同时,需要和硬件设备相匹配的软件拓扑结构和软件框架也相应的创新设计,才能将硬件设备创新的优势,在系统应用时得到最大程度的发挥。
1 射频直通电子对抗系统
射频直通的电子对抗系统,主要由天线前端子系统、微波收发子系统、数字处理子系统和显示控制子系统组成[6],具体的系统框图如图1所示。天线前端子系统主要是多个微波天线组成,将空间中的电磁波转换成系统中的微波信号,以便在电子对抗系统的各个环节,按照既定的流程和处理方式,进行后续处理。天线的个数和排布方式由系统的空域及频率域进行约束;微波收发子系统将天线前端子系统输出的高频微波信号,进行滤波、放大、混频处理后,降频至数字系统可以采样的中频微波信号;数字处理子系统将微波收发子系统输出的中频微波信号进行AD采样成数字信号,进行数字信号处理后,生成信号级的脉冲描述字(PDW),再经过数字信息处理后,生成威胁目标的信息描述字(EDW),再次经过数据处理后,形成威胁目标的目标识别信息及航迹信息;显示控制子系统完成将用户的任务意图,通过可视化软件的方式,形成系统的控制流,下发给实时控制软件,并接受实时控制及数据处理软件上报的威胁目标的航迹信息,显示在可视化软件上,以供用户查看威胁目标的详细信息及进行下一阶段的任务决策。

图1 射频直通电子对抗系统组成框图
传统射频直通的电子对抗系统的组成简单、清晰,信号流和控制流都是可以在前期系统设计的时候预设好的,系统各级的增益分配,故障隔离,都可以在前期进行很好的设计,并且在后期调试和维护的时候,也相对比较简单。由于以上优点,传统的直通电子对抗系统受到电子对抗行业的普遍使用。和传统的直通电子对抗系统相匹配的软件架构设计也相对简单、清晰,各个软件配置项,在各自对应的数字系统上,按照系统设计时分配的软件需求,进行独立的设计,每个软件配置项都是和各自的硬件模块,以及分配的软件需求高度耦合,然后各司其职,将设计好对应的软件功能、性能、接口,与数字平台一起完成系统任务。
传统射频直通的电子对抗系统由于上述特征,导致其硬件模块和软件模块缺乏灵活性,使得整个系统需要在设计前期就考虑完备,调试后期发现问题很难进行调整,并且系统缺乏拓展升级能力,很难进行系列化升级改进。
2 基于射频路由的电子对抗系统
随着电子对抗系统面临的空间电磁威胁越来越复杂,从而使得电子对抗系统自身设计也越来越复杂。主要体现在以下几个方面:
1)为了满足威胁微波信号工作频段的不断扩展,要求系统具备多种不同波段天线前端,由于不同波段天线的物理差异很大,几乎没法共用同一组天线前端,导致系统中的天线前端种类不断增加;
2)电子对抗的天线前端的有效空域覆盖范围普遍是±45°,为了满足系统对全向空域的要求,以及系统对外界威胁的响应时间的要求,像雷达旋转方式的空域覆盖方式,很难满足响应时间要求,所以只能采用空域叠加组合的方式,按照不同工作象限,将空域360°划分为A、B、C、D四个有效象限,在各自象限内,安排一组天线前端,从而通过4个象限拼接的方式,满足空域覆盖要求和响应时间要求。
以上两个方面的因素,导致系统的前端数量急剧增加,如果还是按照传统直通的方式设计系统,那么系统的处理链路数量将会急剧增加,从而带来系统的硬件成本、调试成本和维护成本都急剧增加,几乎很难满足系统的总体要求。
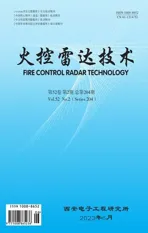
射频路由子系统的设计引入,可以很好地解决这个矛盾。射频路由子系统,可以在满足微波指标的前提下,根据输入的工作模式指令的控制,实现多路输入,多路输出的射频路由功能(输入端口数量N可以远大于输出端口数量M),这样就可以将多象限、多类型的微波前端子系统,和后续的综合处理子系统去耦合,只需要固定数量的综合处理模块,实时控制软件依据任务配置的控制流和数据流,依据当前节拍需要的微波前端和综合处理模块之间的耦合关系,实时地控制射频路由子系统的工作模式,将微波信号和综合处理模块进行桥接联通,从而对当前节拍需要进行处理的数据流进行处理。具体的系统框图,如图2所示。
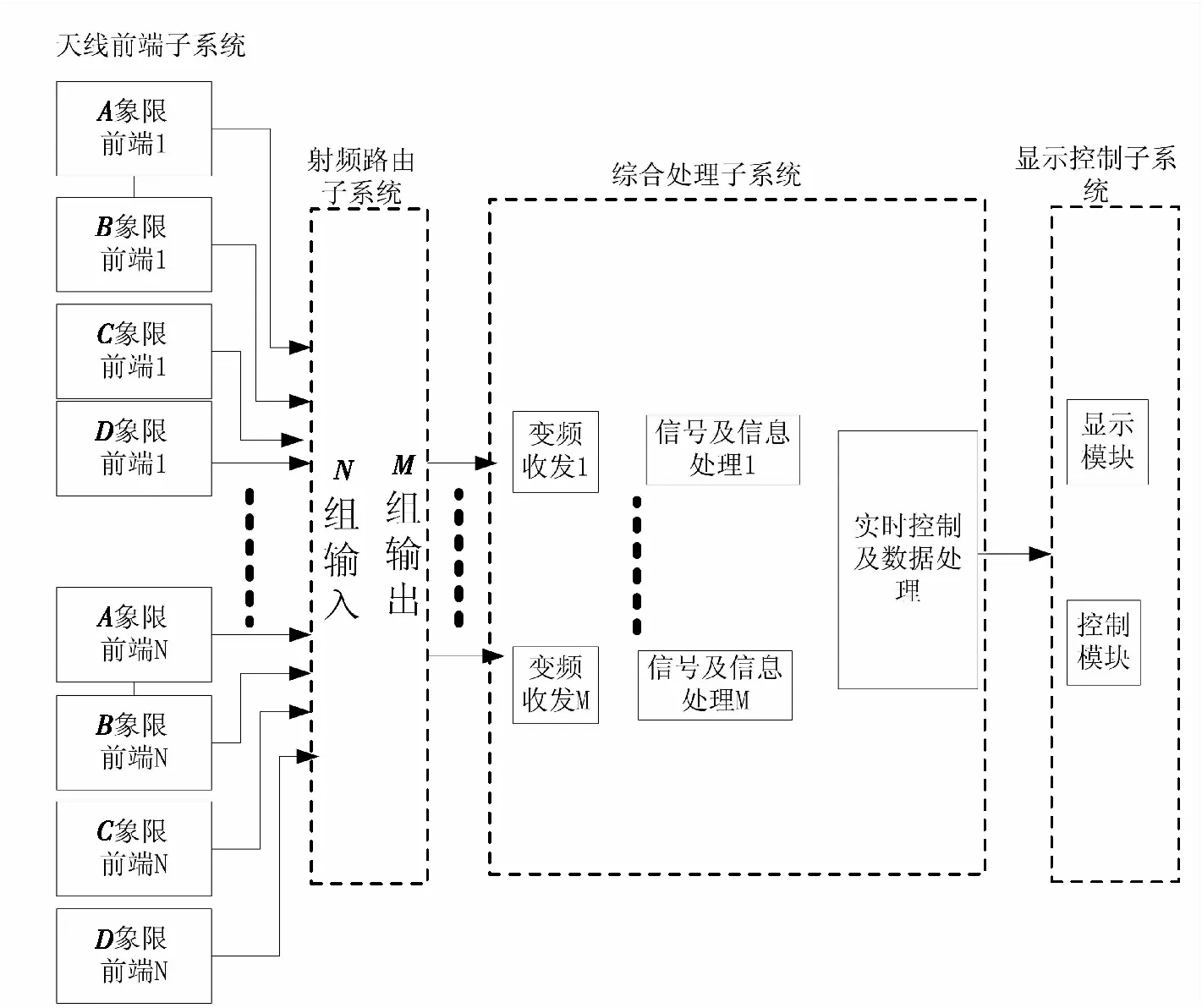
图2 多象限射频路由的电子对抗系统组成框图
系统引入射频路由子系统后,系统的硬件扩展性也会有很大提升。在射频路由子系统设计时,可以预留设计一些当前系统暂时不用,但是可以用于微波链路扩展的输入输出端口,尤其是当存在后端综合处理需要增加微波链路时,不需要重新设计微波链路,只需要相应的增加后端综合处理模块数量,并启用预留的输入输出端口即可完成整个数据链路的搭建。再者,通过射频路由的串行级联的方式,可以实现更复杂的射频路由拓扑结构。因此,在系统硬件和软件数量提升和能力增强方面,系统引入射频路由子系统后,具有很大的潜力和优势。
为了最大能力地提升系统引入射频路由子系统后的优势,需要精心设计对应的软件框架。如果软件框架设计的合理高效,那么该系统设计的优势就可以很好地发挥出来,并且在后续系统的升级、扩展过程中,可以发挥扩展性强的特点,和综合处理模块一起,做一些配置文件的调整,或者软件的少量修改,就可以发挥新增硬件的任务功能。
3 软件框架设计
在如图2所示的系统中,一般存在的软件配置项有如下几项:
1)侦察信号处理软件;
2)干扰信号处理软件;
3)信息处理软件;
4)实时控制软件;
5)系统控制软件;
6)阵列射频前端控制软件;
7)射频路由控制软件;
8)干涉仪前端软件;
9)变频收发控制软件。
由于各个系统的需求不同,在硬件设计和软件配置方面,存在很大的差异,但是经典的电子对抗系统的软件拓扑图,如图3所示,在该图示中,基本上包含了电子对抗系统中各个子系统可能配置的软件配置项及其基本的软件功能需求和接口需求,并且为了满足后续对数据流通道的扩展升级需求,将信号及信息处理模块、变频收发模块按照通用化、模块化的思路进行设计,并且将控制接口和数据接口,都挂接在实时控制软件的控制总线和数据总线上,需要进行通道扩展时,只需要将通道数N累加,并且接入对应的硬件模块和软件程序即可。

图3 基于射频路由的电子对抗系统典型软件拓扑图
在该软件拓扑结构中,侦察信号处理软件、干扰信号处理软件、系统控制软件、阵列射频前端控制软件、射频路由控制软件、干涉仪前端软件、变频收发控制软件等软件都是为了满足各自硬件子系统的需求开发和配置,功能和性能指标相对比较固定,所以可以看做是硬件子系统的固件软件开发。
最能体现软件框架处理能力和灵活性,主要是实时控制软件和信息处理软件。实时控制软件和信息处理软件通过通信总线进行控制通信和数据通信,为了保证通信的高并发性和高数据通量,一般通信总线采用高速数据总线,如SRIO总线或GBE千兆网总线。实时控制软件在通信总线上作为主控逻辑节点,依据系统的任务需求,生成各个子系统的控制逻辑和时序节拍,核心控制是从通信总线上选择哪些信息处理软件需要参与本次计算任务并对其实施控制,决定了当前节拍下的数据链路及处理逻辑。信息处理软件作为信号和信息处理模块的控制中心,是通信总线上负责数字处理的从节点。每个信号和信息处理模块以及运行的信息处理软件,都依据模块化、通用化的方式设计,具有完全相同硬件功能和软件功能,按照系统的数字处理需求决定系统中信号和信息处理模块的数量,形成系统的数字处理资源库,并将这些信号和信息处理模块以从节点的方式挂接在通信总线上,通过信息处理软件的节点通信功能,实现与实时控制软件之间的通信。当系统中需要扩展数字处理能力时,只需要在通信总线上挂接更多的信号和信息处理模块,并增加实时控制软件的节点配置数量,就可以快速将新增的信号和信息处理模块加入系统的数字处理资源库中,参与系统的数字处理任务。
下面分别就实时控制软件和信息处理软件进行详细的设计。
3.1 实时控制软件
实时控制软件作为系统控制的中枢,依据系统控制软件下发或者系统配置文件预设的任务规划,生成任务序列和对应的控制集、数据集。实时控制软件依据任务要求,生成系统的实时系统状态,再按照系统实时状态下对各个软件项的要求,生成针对每个相关软件项的接口及接口数据,并发送给对应的软件项,完成对软件项所在的子系统或者子模块的控制,并通过设计的软件项之间的同步机制,按照统一的节拍,同步所有的系统或者子模块的行为。
实时控制软件的软件框图如图4所示。
图4 实时控制软件软件层级框图
3.1.1 外部软件项
外部软件项主要描述与实时控制软件存在接口交互的软件配置项,用于梳理与这些软件配置项之间的接口类型、接口协议等逻辑关系,没有实际的数据流和控制流。
3.1.2 通信链路层
通信链路层主要实现与各个外部软件项进行通信的通信链路控制功能,根据不同的通信物理链路,完成不同通信方式的通信模块初始化及通信的收发控制功能,主要包括以下几个方面:
1)信息处理软件的通信链路:SRIO/GBE双向通信,实控软件下发控制命令,信息处理软件上报处理数据;
2)与阵列前端控制软件的通信链路:SRIO双向通信,实控软件下发阵列前端控制软件的控制命令,阵列前端控制软件上报控制命令数据校验的结果;
3)与干涉仪前端控制软件的通信链路:
同步422串口通信:双向通信,实控软件下发干涉仪前端控制软件的控制命令,干涉仪前端控制软件上报控制命令数据校验的结果;
4)与射频路由控制软件的通信链路:
同步422通信:双向通信,实控软件下发射频路由控制软件的控制命令,射频路由控制上报控制命令数据校验的结果。
3.1.3 子系统控制层
子系统控制层主要是外围硬件子系统的控制和对N路信息处理软件的控制。每个节拍中具体是N个信息处理软件中,那些软件参与任务的完成,是由任务管控模块和系统控制模块共同分配完成的。
根据调度控制层分配控制逻辑,将这些控制逻辑按照参与任务的信息处理软件的个数和分配情况,分配到对应的需要参与的信息处理软件的子系统控制中,完成控制命令的下发、上报数据的接收解析、处理节拍的同步等功能。
3.1.4 调度控制层
调度控制层主要完成对整个系统功能和系统状态的控制。系统控制的逻辑输入是任务管控模块生成的系统任务流和各个系统控制节拍中生成的各种数据集合。
任务管控模块生成的系统任务流决定了系统控制的主要框架和主线,在该主要框架和主线的规划和指示下,当下节拍中系统需要具备的系统功能和系统状态,还需要由以往节拍(主要是上一个系统阶段)中生成的数据来充实和调整,如:需要根据确认结果中是否存在待干扰目标,才能决定是否能够生成干扰引导报告,从而才能按照系统硬件资源的约束生成执行的干扰引导报告,并且按照干扰引导报告执行系统控制。
3.1.5 数据处理层
数据处理层主要完成对信息处理软件上报的处理结果进行辐射源信号相关的数据处理。主要分为以下两种类型:
1)象限数据处理:
根据系统设计的空间分配,将空间分为A、B、C、D四个象限,由于四个象限对空间进行了分割,所以四个象限能够截获到的辐射源信号之间没有相关性(象限交叠部分和转象限场景除外),为了提高数据处理的效率,将不相关的信号之间数据处理分开处理,所以将基础的数据处理功能模块按照A、B、C、D四个象限的空间划分,分为A、B、C、D四个象限的数据处理子模块。
基础的数据处理功能,主要完成进行和雷达辐射库的匹配识别,并根据匹配识别的结果,分别生成已知信号活动库和未知信号活动库,按照后续上报信号的参数,对已知信号活动库和未知信号活动库中对应信号进行参数的更新,并且按照一定的节拍对两个活动库信号进行滤波处理,对长期未更新的信号进行删除。
2)系统数据处理:
系统数据处理,是在象限数据处理的基础上,对系统共性的数据处理功能的实现,包括以下功能:根据系统控制模块的触发,依据A、B、C、D四个象限的数据处理生成已知活动库的基础上,生成干扰引导报告;在已有干扰引导报告的基础上,依据侦察确认到新的待干扰目标,对已有干扰引导报告进行更新;待上报已知辐射源信号列表和待上报未知辐射源信号列表组合为统一的待上报辐射源信号列表,并上报系统控制软件。
3.1.6 外部引导层
外部引导层主要是根据系统控制软件下发的任务规划,或者系统配置文件预设的任务规划,生成系统需要执行的任务序列和对应的控制集、数据集,输出给调度控制层,再由调度控制层,依据当前的系统可用资源,生成系统的实时系统控制流。
3.2 信息处理软件
信息处理软件作为系统将辐射源信号转换成信息源信息的软件,起到承上启下的重要作用。信息处理软件接收实时控制软件下发的控制指令和数据,转化为自身的控制参数和执行数据,并按照实时控制软件控制的节拍,通过对变频收发模块、侦察信处软件、干扰信处软件等子系统的控制,输入侦察信处软件侦察到的辐射源信号,经过预处理、信号分选等信息处理方式后,将其转换为辐射源信号,上报给实时控制软件,并继续执行预设的下一个节拍任务或者等待实时控制软件下发下一节拍的任务。
信息处理软件的软件框图如图5所示。

图5 信息处理软件框图
3.2.1 外部软件项
外部软件项主要描述与信息处理软件存在接口交互的软件配置项,用于梳理与这些软件配置项之间的接口类型、接口协议等逻辑关系,没有实际的数据流和控制流。
3.2.2 通信链路层
和实时控制软件类似,通信链路层主要实现与各个外部软件项进行通信的通信链路控制功能,根据不同的通信物理链路,完成不同通信方式的通信模块初始化及通信的收发控制功能,主要包括与实时控制软件、侦察信号处理软件、干扰信号处理软件之间的SRIO通信,与变频收发控制软件之间的同步422串口通信,具体的硬件通信方式与实时控制软件的通信链路层一致。
3.2.3 数据的分配和收集层
数据的分配和收集层主要是对控制流和数据流的分配和收集功能。控制流的处理方式是根据通信链路层接收到的控制流,完成对信息处理软件状态和流程的控制,从而使信息处理软件按照实时控制软件控制的节拍和功能,完成分配的处理任务。数据流的处理方式,是将需要处理的数据按照数据量大小、处理能力和处理时间的约束,合理地分配到多核处理器上,进行并行的信息处理,并且将多核处理结果进行同步、接收、融合,生成最终的信息处理结果,上报实时控制软件。
3.2.4 并行处理层
并行处理层主要是根据数据分配和收集层对参与信息处理的多核处理器,进行信息处理任务的分配和处理节拍的同步。参与运算的多核处理器主要完成以下一些信息处理的计算处理任务:
1)pdw预处理:剔除无效pdw,对满足条件的pdw进行融合,计算脉宽、频率、幅度等参数。
2)测向:包含比幅测角、比相测角、和差测角。
3)角度聚类:根据测向结果,对DOA进行聚类。
4)分选:包含频率分选、PRI分选。
5)脉内识别:输入为信道化后数据,识别出脉内调制类型,并计算带宽、调频斜率、码速率等参数。
参与运算的多核处理器将自身负责的处理任务完成后,在数据分配和收集层的统一调度和同步下,将处理结果上报数据分配和收集层,完成本次分配的处理任务,继续等待分配下一节拍的处理任务。
4 结束语
本文对比分析了传统的射频直通电子对抗系统和引入射频路由子系统后的电子对抗系统的优缺点,认为引入射频路由子系统,可以提升系统的扩展性的同时,降低硬件设备的数量和成本。为了最大能力提升系统引入射频路由子系统后的优势,设计了一种和该系统匹配的软件拓扑结构和对应的软件框架。在该软件拓扑结构中,实时控制软件和信息处理软件是整个软件拓扑的核心,本文就实时控制软件和信息处理软件的特点,分别详细设计了两种软件的软件框架,以及两种软件之间的交互关系。该软件框架的设计可以对今后具有类似功能特性和硬件结构的电子对抗系统的软件设计具有很好的指导意义。