一款小型地垄式草莓采摘装备的设计
2023-07-13陈淑娴蒋立军奚秀芳
陈淑娴 蒋立军 奚秀芳

摘要:中国是草莓生产和消费大国,但采摘收获方式仍主要依赖人工进行。针对地垄式草莓人工采摘劳动强度大、效率低以及市场上现有采摘装备结构复杂、价格昂贵等问题,设计一款小型地垄式草莓采摘装备。设备集草莓识别、采摘、传输、收集功能于一体,由行走装置、采摘装置、适应调节装置、收集存储装置和控制电路部分构成。经样机收获性能验证试验,小型地垄式草莓采摘装备能够有效辅助人工开展采摘作业,提高劳动效率,创造经济价值。
关键词:小型;草莓;采摘;装备
中图分类号:S225 文献标识号:A 文章编号:1003-4374(2023)02-00-06
Design of A Small Size Equipment of Ridge Type for Strawberry Picking
Chen Shu-xian Jiang Li-jun Xi Xiu-fang
(1. Guangxi Vocational University Agriculture , Nanning, Guangxi 530007, China;
2.Liuzhou Overeem Machinery Co., LTD, Liuzhou, Guangxi 545005, China)
Abstract: China is a big country of strawberry production and consumption, but the picking and harvesting methods still mainly rely on manual work. Aiming at the problems of high labor intensity, low efficiency and complex structure and high price of existing picking equipment on the market, a small size equipment of ridge type for strawberry picking is designed. The equipment integrates the functions of strawberry recognition, picking, transmission and collection. It consists of walking device, picking device, adaptive adjustment device, collection and storage device and control circuit. Through the prototype harvest performance verification test, the small size equipment of ridge type for strawberry picking can effectively assist the manual picking operation, improve labor efficiency and create economic value.
Key words: small size, strawberry, pick, equipment
草莓是世界溫带和亚热带地区广泛栽培的草本浆果之一,具有“水果皇后”的美称[1],在世界上大部分地区广泛种植,是全球重要的经济农作物之一。其鲜美红嫩,香气浓郁,深受人们青睐,且经济效益显著,销售市场广阔,极具发展前景。
在我国,草莓种植分为地垄式和高架式两种,其中地垄式栽培占栽种率的80%以上[1]。通过对地垄式草莓采摘情况进行调研后可知,虽然草莓作为一种深受喜爱的高营养农作物,产量在逐年上升,但在我国采摘工作仍然主要依赖人工进行[2],主要存在以下问题:采摘者需弯腰下蹲进行采摘,长期劳作易导致腰酸背疼,造成工作不便;果农需随身携带收纳箱进行果实收集,收集完成后还需搬运至果园外围,加大了农民的劳动强度;青壮年劳动人口外流,农业从业人员趋向大龄化。劳动力的严重匮乏、采摘过程缺乏规范化等也会影响果实产出率。果实成熟季节收获周期短,若不及时采摘,会因过度成熟而无法食用。据统计,草莓人工收获时间占到生产总环节用时的40%,采摘所用到的人工成本约占草莓生产成本的50%~70%,影响草莓价格居高不下[3]。由此可以看出,草莓采摘工作的复杂程度以及耗费的劳动成本已成为制约草莓种植业发展的重要因素之一,自动化的采摘方式有望取代人工方式,解放劳动力,提高收获效率。
目前国外草莓采摘收获机械方面,德国和日本走在世界前列[4]。例如日本近藤直等学者开发的适用于高架式的采摘机器人,通过在龙门式移动平台上安装5自由度的直角坐标机械臂,由机器视觉系统与末端执行器配合,实现识别、定位、吸入、剪切的采摘过程[4]。德国AG ROBOT公司所研发的大型草莓采摘机,可实现全天不间断作业,相对人工采摘时效更长、产能更大。其安装有24个独立机械臂同时开展作业,并应用轮式行走装置,配合超声波传感器,实时监测车轮与田垄的距离,避免机器行走过程损伤植株。国外采摘设备智能化程度高,但存在以下局限性:一是设备多用于高架栽培式草莓,不符合我国传统地垄式栽培需求;二是设备体积庞大,结构复杂,成本较高,难以在中国小农经营模式下广泛普及,严重限制技术成果向实际生产转化;三是设备必须适配相应标准化的种植温室,不能运用在不同规格种类的垄地中。而中国的草莓种植业具有其特殊性,草莓田垄没有相对固定的规格,彼此之间形状差距较大。
相比国外,国内地垄式草莓采摘机械化研究起步较晚,但也取得一定成果。例如杜国峻等[5]设计一种草莓采摘机,机器由单电机驱动,利用手爪双曲柄机构将草莓从地垄上挑起并割断果梗,果实随着收集圆盘运动后落入收集装置。段利英等[6]设计一种可伸缩性草莓采摘装置,由采摘和运输两部分构成,省时省力提高效率等。但国内采摘自动化多为试验室研究阶段,很少进入批量生产实际阶段,在实用性方面仍有很大提升空间。因此,结合我国国情,小型化、智能化、实用化的采摘装备将是未来发展趋势[7]。一方面,设备的小型化可有效提高土地利用率和草莓产量;另一方面,控制系统的智能化也可助力高效无损采摘。产品结构、采摘效率、果实完好率、投入成本在一定程度上完美融合,最终推进装备的实用化。[8]
基于上述问题和现实背景,本文将设计一款新型地垄式草莓采摘装备,旨在满足我国国情的同时,提高工作效率,减少人工成本,助力农业装备现代化发展,帮助农户提高经济效益。
1 装置总体设计
1.1 设计要求
本設计拟定达到的目标如下:第一,结构简单紧凑,体积较为小巧,方便携带,易于在小规模地垄式园区进行移动。第二,成本相对低廉,性价比高,使用简单,操作方便,维修成本低,利于进行普及推广应用。第三,带有自适应结构设计,可满足不同规格垄高和垄宽的草莓种植布局。第四,尽可能避免水果在收纳传输环节造成的损伤,提高果实收成率。第五,采用蓄电池驱动方式,节能减排,绿色环保。
1.2 总体方案
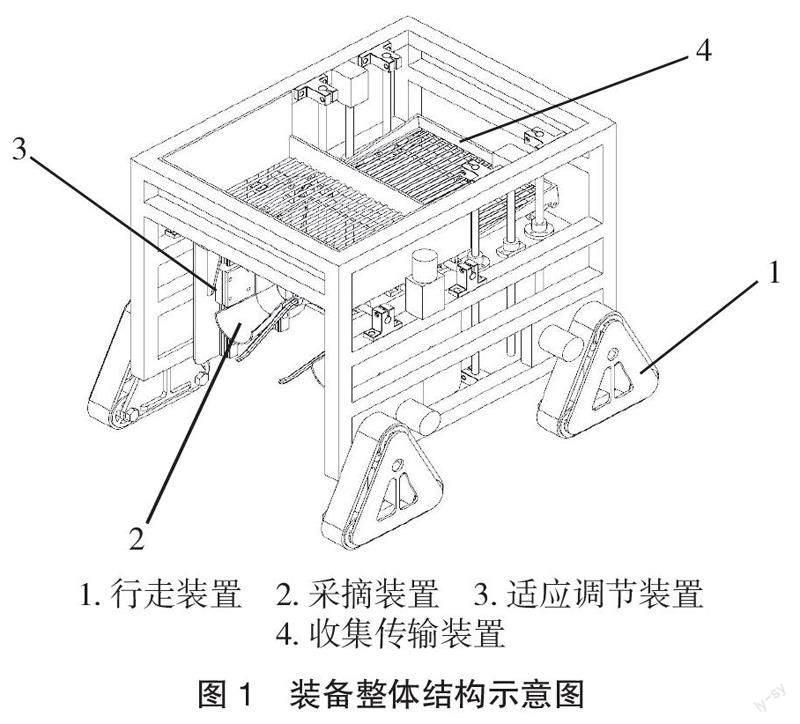
针对设计目标,本草莓采摘装备主要由机械部分和电路控制两大部分组成。其中机械结构包含行走装置、采摘装置、适应调节装置、收集传输装置等,电路控制部分主要是对行走电机、水果识别、切割刀具、梳齿收集器等的综合控制。通过各个部分间的紧密配合来实现草莓自动采摘过程。该装备采用颜色传感器识别检测,刀具进行切割采摘,可适应地垄式草莓生长分布高低不均情况,最终落入收集器,实现了自动化采摘,解决了人工采摘工作劳动强度大、成本高的问题。装备整体结构示意图如图1所示。
1.2.1 行走装置
行走装置位于整机最下方,是由左右共四只履带轮结构组成,主要起承载整个设备的重量,并实现装置整体移动运输的功能作用。行走装置位置示意如图2所示,行走装置结构图如图3所示,由驱动电机(101)、驱动轮(102)、承重轮(103)、履带(104)、挡泥板(105)、支架(106)、紧固螺栓(107)等组成。当按下启动按钮后,控制驱动电机正反转带动驱动轮,实现装置的往返运输和节能减排绿色运行。同时,履带式的运输方式可以加强设备的地形通过能力和整机承载能力。增加挡泥板设计,在行驶过程中阻隔部分泥沙石块等,防止沉积物进入履带轮结构中造成损坏,可有效保护设备机械结构。
1.2.2 采摘装置
采摘装置可进行水果成熟度颜色识别和切割采摘,主要由收集拨杆(201)、传输滑道(202)、颜色传感器(203)、切割刀片(204)、刀片电机(205)、固定板(206)等装置组成。通过模仿人手采摘过程,先由收集拨杆(201)将草莓茎秆挑到对应的传输滑道(202)上,使其与垄面分离,紧接着由高精度颜色传感器(203)判断识别草莓色泽是否达到采摘的条件,如果达到阈值条件,相应的切割刀片(204)则会进行切断草莓茎的动作,使草莓脱落,通过传输滑道导向进入对应的收集装置。反之,刀片不进行切割动作,随着装置行走,使草莓茎秆再次滑落回垄坡上。采摘装置可在必要地方增加防碰减震泡沫,使草莓在传输过程中不易损伤。采摘装置位置示意图如图4所示,采摘装置结构图如图5所示。
1.2.3适应调节装置
为了提高设备对于不同规格垄宽和垄高的适应度,使采摘装备具有更大范围适应力,设计自适应调节装置。主要是由安装在设备两侧的升降导轨(301)、升降滑块(302),以及布置在上方的双丝杠传动结构即水平光轴(303)、光轴座(304)、电机(305)、轴承(306)和支撑板(307)组成。首先将采摘装置固定板(206)与升降滑块(302)进行紧固后,由升降滑块(302)在升降导轨(301)上的上下移动带动实现采摘装置的上下高度调控,能适应不同垄高;同时也可通过两组丝杠螺母机构实现左右宽度可调,以适应不同垄宽,提高装置对不同环境规格草莓垄地的适应性。适应调节装置位置示意图如图6所示,适应调节装置结构图如图7所示。
1.2.4 收集存储装置
收集存储装置实现草莓可靠收集传输,由梳齿收集器(401)、收集器翻转结构(402)、收集器升降机构(403)、收集仓(404)、储存平台(405)等部分组成。工作过程中,由刀片切下来的草莓通过滑道滚落到梳齿收集器(401)上,采用梳齿收集器(401)可以减少草莓之间的摩擦碰撞,有效保护草莓外表质量。收集器升降结构(403)包含光轴可实现梳齿收集器的上升或下降,以配合传输滑道和收集仓的高度。通过梳齿收集器翻转结构(402),可实现梳齿收集器翻转,使草莓落入最终的收集仓(404),完成草莓采摘收集工作。本设备上部可酌情搭设叠放二三层储存平台(405),用于储存大量草莓,使果农不必疲于更换收集器,收集存储装置结构示意如图8所示。
1.2.5 电路控制部分
控制电路部分用于整机控制,通过控制器等实现对整机行走电机、水果自动识别、刀具电机、梳齿收集器电机等的综合控制。直线运动的动力来源一般有液压驱动和电机驱动两种方式,考虑到电机驱动在高速、高精度、小型化、节能等方面更能满足草莓采摘系统的需要。[8]因此,本设备选用电机驱动方式。
通过颜色传感器识别图像红色阈值,并将采集到的数据传输给单片机进行分析和判断草莓成熟度,根据判断结果输出控制信号驱动相应的控制电机转动,实现草莓采摘过程。
2 装备工作过程
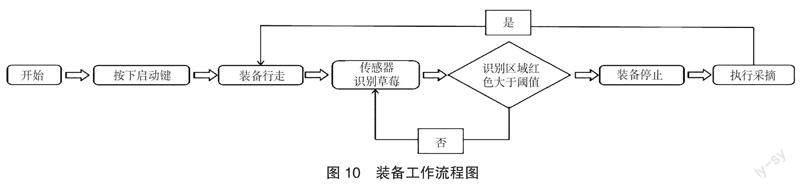
装备在工作过程中,与草莓垄坡的位置关系如图9所示[9]。按下启动按钮,装备开始在田垄上开始直线行走,仿生手指将草莓茎秆从地膜上挑起,拨入传输滑道中。当颜色传感器识别到区域红色大于阈值时,则会控制行走装置停止运行,驱动切割刀片执行切割动作。草莓经由传输滑道滚落至梳齿收集器上进行采集,当采摘到一定数量后,梳齿收集器通过升降机构进行上升后,再由梳齿收集器上的摇杆结构实现翻转,使草莓落入最终的存储仓中,完成采摘收集过程。装备完成单垄采收后,由果农控制其回程继续进行下一垄采摘工作。装备工作流程图如图10所示。
3 样机收获性能验证试验
为了验证样机的有效性,发现存在问题,通过在实训室和草莓园分别针对成熟度判断率、误切割率、采摘效率等主要指标来开展试验。首先在实训室内布置仿真草莓垄地来模拟现场环境进行采摘测试,使用具有一定硬度的线材模拟草莓果梗,果梗下端连接红色草莓模型与绿色草莓模型来模拟成熟草莓与未成熟草莓,并将采摘装备行驶在特制垄地上。按下启动键,采摘装备开始行走执行采摘动作。收集拨杆可将果梗拨入传输滑道中,当传感器识别到红色草莓时,刀片执行切割动作。但验证过程发现,受限于垄坡的高度,使得梳齿收集器无法下降至与传输滑道相同高度进行收集,导致出现切割后的草莓收纳不成功的情况发生。后续将对此问题进行结构上的调试优化。按下返程键,装备还可沿原路返程至最终收纳点,减少采摘者进入垄地回收造成的不便。
同时将样机进入八桂田园草莓园进行实地采摘测试,并将其与实训室仿真模型采摘效率进行比对,样机测试结果比对如表1所示。由于八桂田园草莓园除用于教学研究外,还用于对外进行生态休闲娱乐性采摘,因此与实训室布置环境相比,实际种植垄距更小,果实分布更为密集,受枝叶遮挡等情况更为复杂,对机械式采摘方式具有一定的条件局限性,因此对测试结果也会存在一定影响。
正常人工采摘的效率约为每分钟40颗[10]。由表1统计结果可看出,目前样机采摘效率约为每分钟25颗。但相对于人工采摘,机械式采摘的优势在于能够长时间不间断工作,且一台设备在其寿命范围内可反复多次使用,性价比高,降低人工雇佣采摘的成本。因此,智能化的草莓采摘装置能够有效辅助人工开展采摘作业,提高劳动效率,创造经济价值。
4 装置创新点
该设计相对于现有采摘设备而言,创新之处主要在于:整机结构简单紧凑,体积小巧,可有效提高土地利用率,减小草莓种植间距,提高种植率和产出率,同时在过道行走不易伤害植株,便于携带,结构灵活。行走装置采用四个履带轮式设计,通过性强、行走更稳定,可实现按钮开关控制其往返和启停。采摘装置采用模仿手指设计的仿生拨杆,可将草莓从地膜上挑起并导入采摘装置。设计弹性适应机构,使装备可适应不同垄宽和垄深的草莓种植规格,提高产品的普适性。设计梳齿缓冲仓缓冲草莓,有效保护并存储草莓,减少草莓之间的碰撞。采用传感器技术与单片机控制技术结合,使未成熟草莓误采几率降低。
5 小结
草莓收获周期短,若不及时采摘将给农户造成经济损失。本文介绍了国内外草莓采摘机械的研究现状,并结合我国目前生产实际,针对较为常见的地垄式草莓种植方式,设计一款体积小、智能化、低成本、易使用的草莓采摘装备,对解决果农长时间手工采摘导致身体疲劳及效率低下的问题具有现实意义。
同时该产品具有较强的适应性,经过集成创新改造,还可应用于除草莓之外其它地垄式种植的果蔬(如青椒等)采摘,最大限度提高设备利用率。未来,基于该成果的推广,可与当地农机站和水果基地进行合作,吸引农民进行该设备的租赁和售卖,为地方创造经济价值,助力乡村振兴。
参考文献:
[1]高义虎.草莓采摘关键技术研究与机械手优化设计[D].山东:山东农业大学,2021.
[2]程鹏胜.草莓采摘机器人控制系统的设计与研究[D].江西:江西理工大学,2022.
[3]张曼.草莓采摘机器人远近景组合视覺系统设计[D].陕西:西北农林科技大学,2015.
[4]罗振华,蒋芬.草莓采摘机设计研究[J].科技创新,2019(19):15,24.
[5]杜国峻,姚福林,曹建杰,等.地垄式单驱多果草莓人工辅助采摘装置设计[J].机械设计,2020,37(7):19-23.
[6]段利英,严文超.基于大棚垄地式草莓采摘装置的设计与研究[J].南方论坛,2020,51(13):6-11.
[7]祝前峰,陆荣鑑,鲁峻,等.草莓采摘机械研究现状与发展趋势[J].农业科技与装备,2021(5):62-64.
[8]胡裕庚.草莓自动采摘机的设计[J].林业机械与木工设备,2021,49(12):26-30.
[9]李赟钊,袁锐波,徐成现.草莓采摘机器人行走机构设计[J].农业装备与车辆工程,2021,59(8):69-72.
[10]方海峰,王宁,曹晋,等.基于地垄式自动化草莓采摘装置设计[J].包装与食品机械,2022,40(4):107-112.
(责任编辑:陈洁丽)
