基于Burmester理论的微耕机挡土板导引机构设计*
2023-07-11赵业慧刘姝天廖恒王光明杨延强张宏建
赵业慧,刘姝天,廖恒,王光明,2,杨延强,张宏建,2
(1.山东农业大学机械与电子工程学院,山东泰安,271018;2.山东省园艺机械与装备重点实验室,山东泰安,271018)
0 引言
微耕机[1-2]因其价格低、操作简单、使用维护方便等优点,在山地丘陵、设施园艺等大型作业机具难以进入的地域得到广泛使用。然而微耕机在作业时易出现刀轴缠草的现象,缠草后不及时清理不仅影响作业质量,而且会增加发动机工作负荷。为了解决这一问题,以往的研究重点集中于旋耕刀缠草机理的分析和刀片形状的优化。例如,徐良等[3]建立了杂草在旋耕刀上的缠绕力模型,并通过试验研究了旋耕刀形状和作业参数等因素对杂草缠绕力的影响;郝小征等[4]则对微耕机旋耕刀片和刀辊参数进行了优化设计,通过调整复合刀的挡板高度来减少刀轴缠草。然而,就目前技术水平而言,完全规避旋耕刀缠草是难以实现的,这就使得微耕机缠草的快速清理显得尤为重要。考虑到挡土板与刀轴之间的空间过于狭小,人工清理缠草(尤其是刀轴内侧附近的缠草)时操作不便,通常需要拆除挡土板以实现彻底清理,从而降低了微耕机作业效率。为了能够在清理杂草的时候快速移除挡土板,较为理想的方法是设计一个导引机构,使挡土板能够在其引导下快速抬起并远离刀轴区域。考虑到近似轨迹综合法[5-7]难以控制连架杆与机架之间的铰链位置,故本文基于Burmester精确位置综合理论[8-10]和区域类型图方法完成前述设计。
1 挡土板导引方案
本文采用4R机构的连杆实现微耕机挡土板的刚体导引(将微耕机挡土板固定于4R机构连杆上的一点),这就需要预先确定其连杆的运动轨迹,使微耕机挡土板在运动过程中可以规避运动干涉,尤其是避免带轮传动罩的结构干涉。基于该设计,当需要清理旋耕刀缠草时,只需释放挡土板使其在驱动装置作用下按照预定轨迹抬起即可,而当微耕机作业时,则放下挡土板并将其用销子进行固定。根据Burmester理论,给定挡土板预期运动轨迹线上的4个位置P1~P4(图1),即可反求出所需的4R机构A0A1B1B0,使其连杆上一点E在运动过程中可以顺次通过4个给定位置,从而实现前述挡土板的刚体导引。图1中,位置P1~P4由连杆通过该位置时的导引点坐标(横坐标x,纵坐标y)和倾角Δδ确定。

图1 挡土板的导引任务Fig.1 Guidance task of soil-blocking plate
根据现有微耕机的主视图投影,给出的挡土板导引位置坐标如表1所示。需要注意的是,微耕机挡土板及其导引机构共配置两组,且相对于微耕机中线左右对称。为方便表述,本文仅对其一侧可动挡土板的设计展开讨论,另一侧挡土板及其导引机构只需基于微耕机中线镜像即可获得。

表1 挡土板的位置信息Tab.1 Position information of soil-blocking plate
2 挡土板导引机构设计
2.1 圆点曲线的生成


图2 圆点的确定Fig.2 Determination of circle point
2.2 圆心曲线的生成
由极点构成的两个极点三角形R12R13R23和R12R24R14如图3所示。为求与圆点对应的圆心点必须得到至少3个共圆的圆点,具体过程如下[14]:首先,做圆点C1分别关于直线R12R13和直线R12R14的对称点C123、C124,则C123关于直线R12R23和直线R13R23的镜像点分别为圆点C2、C3,而C124关于直线R14R24的镜像点为圆点C4;而后,任取3个圆点,圆点间连线的中垂线交点即为圆心点S1。显然,圆点曲线中的任一圆点都可求出与之对应的圆心点,从而得到圆心点曲线。

图3 圆心点的确定Fig.3 Determination of center point
2.3 驱动杆安装位置的确定
本文选择气撑杆作为4R机构的驱动杆,并作出如下假定:(1)气撑杆的一端铰接于主动杆A0A1的中点;(2)当挡土板处于位置P1时,气撑杆处于完全压缩状态,而当挡土板处于位置P4时,气撑杆伸展至最大行程。在此假定下,以P1位置时主动杆与气撑杆的连接点M为圆心,以气撑杆完全压缩时的中心距为半径作圆T1,同时以P4位置时主动杆与气撑杆的连接点为圆心,以气撑杆完全伸展时的中心距为半径作圆T2,则两圆T1和T2的交点即为气撑杆在微耕机上的安装位置N,如图4所示。由于两圆T1和T2的交点数量不唯一,可能的安装位置数量只能是0、1或者2。

图4 驱动杆安装位置的确定Fig.4 Determination of driving rod installation position
2.4 Burmester点的有效性检测
在Burmester曲线的计算阶段,也就是构建类型图之前,发现并剔除多余或者不可行的圆心点和圆点,将大幅减少后续计算量并缩小机构解的搜索范围。Burmester点的检测内容和取舍依据如下。
1) 最小间距要求:首先选定最靠近边界的圆心点,将其编号为1,而后以(欧式)距离最小为原则依次将临近的圆心点编号至圆心点的总数n,再依据编号大小对圆心点进行升序排序。在此基础上,排除相邻两点间距过小的圆心点和与之对应的圆点。
2) 对称性原则:(1)考虑到圆心点即4R机构中连架杆与机架的铰接点,故其位置应当位于预期安装区域以内。如前所述,微耕机挡土板及其导引机构必然存在两组且相对于微耕机中线左右对称,为了避免两侧机构交叉干涉,应当确保任一圆心点及其对应的4个圆点,连同4个给定的挡土板位置都应当位于微耕机中线同一侧,本文将其称之为“对称性原则”。根据这一原则,即可对各圆心点及其附属圆点进行判别,当圆心点或任一圆点不符合对称性原则时则予以剔除。(2)本文将驱动杆(即气撑杆)的设计放在Burmester曲线的处理环节。如果与圆心点对应的所有可选驱动杆的安装位置均不符合前述对称性原则,也应当将该圆心点及其附属圆点予以剔除。
3) 驱动杆分支一致性:驱动杆仅能做线性伸缩运动,而4R机构的主动杆却只能做旋转运动。如前所述,本文假定将驱动杆安装在主动杆上,这就要求4R机构的主动杆与驱动杆在导引运动过程中不存在分支变换问题,尤其是主动杆与驱动杆在P1位置和P4位置的分支构型应当确保一致。在图4中,为便于研究,定义矢量H,如式(1)所示。
H=A0M×MN
(1)
式中:H——由A0点指向N点的矢量;
A0M——由A0点指向M点的矢量;
MN——由M点指向N点的矢量。
需要注意的是,向量A0M与MN均需要扩展至三维坐标系中,其第3分量均为0。当矢量H的第3分量在P1位置和P4位置的取值异号时,驱动杆与主动杆在运动过程中存在分支变换,即
H(3)(1)×H(3)(4)<0
(2)
式中:H(3)(1)、H(3)(4)——矢量H第3分量在P1位置和P4位置时的取值。
分支变换在无人工干预的情况下是无法实现的,故可判定为缺陷解。当任一可选驱动杆在安装时均存在分支缺陷时,则相应的圆心点和圆点应当予以剔除。
通过前述检测与处理,圆心点数量由最初的n个缩减至n*个,从而在4R机构的二杆组组合之前就已经将后续的可行解搜索范围从n×n大幅降低至n*×n*,如图5所示。
(a) 初始圆心曲线
3 区域类型图求解与分析
3.1 区域类型图方法
类型图法最初用于全局解域分析[15-17],特点是“属性明显、位置隐含”,难以在选择机构解时确保其具有恰当的安装位置。通过前述Burmester点的区域筛选,使不符合对称性原则的圆心点及其圆点被预先剔除。在给定的矩形区域中,将其分割为阵列n*×n*的网格,每个网格的坐标(i,j)对应于第i个圆心点和第j个圆心点及其附属圆点所组成的4R机构解,即构成类型图(图6)。

(a) 原始类型图
由于经过前述区域筛选,区域类型图中的所有机构解都满足位置要求,但还需要进行回路、分支和顺序缺陷甄别,具体方法参考作者前期的研究结果[18]。每个网格解的属性(机构类型[19]、缺陷类型等)使用不同的颜色表示,如表2所示。

表2 区域类型图的颜色代码Tab.2 Color code of region type map
这样,根据颜色导引即可在区域类型图中选择到潜在的可行机构解。
3.2 运动学分析
为了对所选机构解进行评价,需要对导引4R机构进行运动学分析,核心是绘制其连杆曲线。基于矢量环法与欧拉公式代换,不难求得从动杆转角与主动杆转角之间满足如下关系。
Asinθ3+Bcosθ3+C=0
(3)
A=2l3(l1sinθ1-l4sinθ4)
(4)
B=2l3(l1cosθ1-l4cosθ4)
(5)
C=l22-l12-l32-l42+2l1l4cos(θ1-θ4)
(6)
式中:l1~l4——4R机构主动杆、连杆、从动杆和机架的长度,mm;
θ1、θ3、θ4——主动杆、从动杆和机架的转角(或倾角),rad。
解算前述方程后有
(7)
求得θ3后,连同θ1,可进一步求得连杆及其导引点的位置,这里不再赘述。但需要说明的是,方程(7)存在两个解,分别对应于4R机构的两个分支构型。为了正确分辨和确认机构解的分支缺陷,需要对两个分支分别求解并予以区分。
3.3 程序设计与求解
基于前述算法编写的导引机构求解程序如图7所示。在输入导引任务(表1所示挡土板位置信息)后,由程序生成区域类型图和可用驱动杆(即气撑杆)选项。程序内置了23种常用规格的气撑杆数据,在Burmester曲线计算阶段即对无法满足要求的气撑杆进行了标记,并预先剔除掉无可用气撑杆的圆心点和圆点(参考第2.5节),该部分的计算流程图如图8所示。

图7 刚体导引的计算程序Fig.7 Calculation program for rigid body guidance

图8 Burmester点的计算流程图Fig.8 Flow chart of Burmester point calculation
通过X轴滑块和Y轴滑块移动区域类型图中的定位游标,即可定位到所需的候选解。定位游标通过所在网格的颜色指示每个解的类型属性和缺陷属性。选定候选解后,图形显示区会自动显示所选4R机构的安装情况和导引轨迹,与此同时,驱动杆选择区会通过列表显示出可用的气撑杆及其规格数据。当某型号的气撑杆被选择后,图形显示区将显示气撑杆的安装位置。最终,导引机构和气撑杆的安装信息和属性信息会在结果输出区域输出。
根据前述方法获得的导引机构解并不唯一,可根据后续分析做进一步筛选。其中一组典型解如图9所示,该机构解在P1位置时的坐标信息为A0(30.233 7,473.404)、A1(98.354,261.839)、B0(81.452 4,471.107)、B1(143.714,282.839)、N(8.758 17,144.427),各杆件的杆长如表3所示,其所使用的气撑杆规格如表4所示。
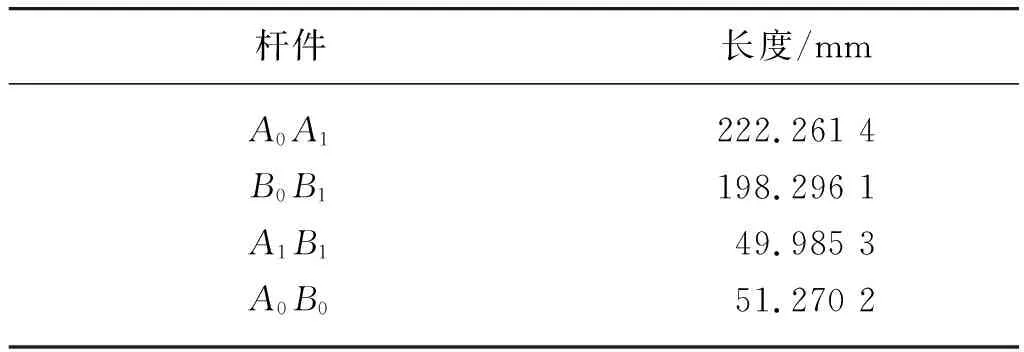
表3 各杆件的杆长Tab.3 Rod length of each rod

表4 气撑杆规格Tab.4 Specification of pneumatic lifting bar
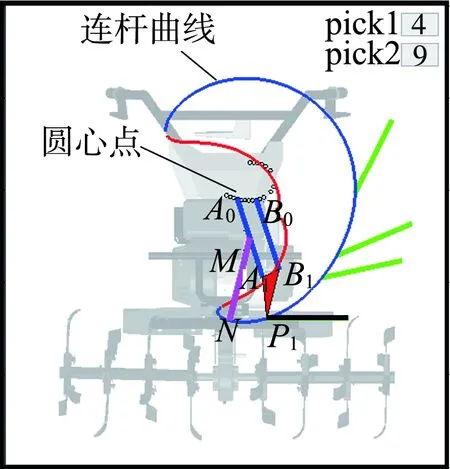
(a) 连杆通过位置P1
由图9可知,当需要清理刀轴缠草时,所设计的可动挡土板可在4R机构和气撑杆作用下升起,其挡土板在运动过程中可顺次通过4个给定位置P1~P4,从而避开机体结构障碍。不仅如此,整个机构自始至终都在微耕机中线一侧运动,从而避免两侧机构交叉干涉。由表3、表4可知,主动杆、从动杆、连杆和连架杆长度分别为222.261 4 mm、198.296 1 mm、49.985 3 mm和51.270 2 mm,最终确定的气撑杆最大中心距为380 mm、行程为150 mm。
4 结论
1) 本文提出了微耕机可动挡土板的设计方案,使用4R机构的连杆实现挡土板的导引运动,并使用气撑杆驱动4R机构的主动杆旋转,可在需要清理缠草的时候释放挡土板使其抬起,从而提升微耕机的缠草清理效率。
2) 基于镜极4R机构旋转法和所提出的区域类型图法实现了微耕机挡土板导引机构的刚体导引设计,不仅可以快速排除不符合“对称性原则”的Burmester曲线点,而且可以精准定位到满足类型和无缺陷条件的机构解,从而大幅提升设计效率。
3) 在此前的工作中,4R机构刚体导引与驱动杆设计是分开进行的,驱动杆在设计时盲目性较大,需要反复尝试比对,甚至需要推翻已经获得的机构综合方案。而本文将驱动杆的设计放在Burmester曲线点的检测环节,从而大幅减轻了刚体导引设计后的机构解分析工作量。
4) 开发了以镜极4R机构旋转、驱动杆优选和区域类型图为核心算法的微耕机挡土板设计程序,并对设计结果进行了运动学分析验证。最终确定的主动杆、从动杆、连杆和连架杆长度分别为222.261 4 mm、198.296 1 mm、49.985 3 mm和51.270 2 mm,最终确定的气撑杆最大中心距为380 mm、行程为150 mm。
5) 除了微耕机挡土板导引机构,本文研究方法和设计理论同样可以解决其他农机设计中的刚体导引问题。在接下来的工作中,将重点对刚体导引中的动力学问题展开研究,从而在刚体导引计算时充分考虑驱动杆的受力情况。
