四足机器单腿轨迹、速度与加速度仿真
2023-07-11翟雨

摘 要:四足机械在运动采用三次样条插值过程中足端与地面接触的瞬间,会使机械发生一定量的震动。为进一步减轻这种震动量提高稳定性,本文采用串联式仿蜘蛛机械腿,利用摆线方程进行轨迹规划、速度、加速度。在优化摆线方程的基础上,采用Matlab进行设计仿真腿型,模拟串联式机械腿在平稳路面的轨迹,因而验证四足机械在采用优化过的摆线方程轨迹,可以进一步提高其稳定性。
关键词:四足机械;三次样条插值;轨迹规划;串联式机械腿
1 概述
本文研究“四足机器的单腿运动轨迹、速度与加速度仿真”,想法来源于国内四足机器不断发展,足态运动必须得到改善。本文研究目标是四足仿生机器、昆虫节肢动物式串联结构的机械腿型,针对四足机器在前行、左右以及转向时机械腿与机体发生的震动现象。主要是进行控制理论与仿真软件的研究,为串联式结构提供稳定、流畅、动态平衡的控制方法,从而使四足机器应用更加平稳、高效。
1.1 研究背景及研究意义
四足机械是最早的仿生机械,其仿生对象以哺乳动物与截肢昆虫为主,随着电子领域、数学方法、机械控制、计算机领域进入高速发展,具有不同功能的机械层出不穷。作为世界顶流机器人研究公司Boston Dynamics公司,主要代表作有BigDog、WildCat。他们的作品,可以完成相对速度较小的跑动和简单的平衡能力。日本东京大学研发的四足机器PLGORAS,其最大特点可以通过模拟神经系统自主移动,不需要进行动作编程。基于以上情况,本文针对四足机器单足串联式机械腿的轨迹规划、速度、加速度进行Matlab仿真实验研究,最终是为四足机器人提供可靠的运动轨迹、速度与加速度的控制方法,从而为科研人员提供可靠的参考。
1.2 步态规划与稳定性研究现状
足式机器人作为机器人的重要分支,具有较高的机动性能,足部步态与轨迹控制得当,可实现攀爬、奔跑、跳跃、越障等动作,为提高性能、移动速度、跳跃高度进行各种研究。国内研究中以各个高校最为活跃,其中主要研究单位有哈尔滨工业大学、清华大学,代表了我国四足机器研究的最高水平。其中“四足机器人全向运动规划方法与稳定性研究”[1],其主要研究的是哺乳动物的四足仿生机械结构、液压系统与传感器组成的机械,提出了基于浮动机体的运动学原理,在不规则地形条件下全向运动规划法。还有上海大学的王兴兴研制出一款Aliengo机器人,该机器特点是首个国内实现后空翻的四足机器人。从机器人演示视频、发表论文与期刊等控制依旧与世界最顶尖的存在差距,这些差距主要存在于材料、控制。
2 四足单腿机械结构
2.1 引言
四足机器人的单腿设计原理是仿生学原理,本文单腿运动建立在三自由度的腿部机械结构,足部结构简化满足基本运动需求即可,而腿部结构根据具体需求进行添加缓冲结构优化,以及不同的运动方式改动机械结构。
四足机器单腿采用串联式其特点有以下方面:
特点1:可实现跨越矮小障碍物。
特点2:运动轨迹与地面形成非连续型离散点,虽有一定规律和可预测性,相对来说,不需要连续接触地面。
特点3:灵活性强,自由度多,继而控制困难。
以上特点可以使足式机器人工作在复杂地形,例如山区和坑洼地带。
2.2 四足机械按腿部分类
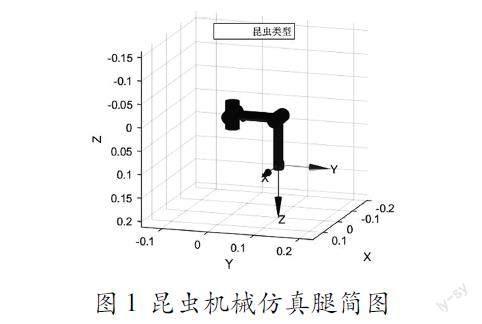
存在的腿部形式只有两种,一种是串联式类似于昆虫类型腿部机械结构,串联式昆虫腿部仿真机械类型,结构简图如图1所示:
图1 昆虫机械仿真腿简图
另一种为并联式机械结构,两种结构特点是都是连杆与舵机组合,而串联式、大腿连杆、小腿连杆、基部连接杆以及舵机组合,主要由三自由度到一自由度以下组合,自由度越高控制越困难,自由度越低控制越简单,本文主要研究以及仿真三自由运动特点。
3 四足单腿规划研究
3.1 运动学正解求解单腿末点坐标
针对单腿运动学分析时,运动学正解求解就是已知初始足端点位置和三个转角大小,求解足端点末位置。因此可以采用DH算法即可。
3.2 DH算法
使用DH方法在单腿建立坐标系,相邻关节的DH变换矩阵为:
Ai-1i=cθi-sθicαisθisαiaicθi
sθicθicαi-cθisαiaisθi
0sαicαidi
0001(1)
变换矩阵为(2):
T03=A01A12A23=cθ1cθ2cθ3-cθ1sθ2sθ3-cθ1cθ2sθ3-cθ1sθ2cθ3-sθ1l1cθ1+l2cθ1cθ2+l3cθ1cθ2cθ3
sθ1cθ2cθ3-sθ1sθ2sθ3-sθ1cθ2sθ3-sθ1sθ2cθ3cθ1l1sθ1+l2sθ1cθ2+l3sθ1cθ2cθ3
-sθ2cθ3-cθ2sθ3sθ2sθ3-cθ2cθ30-l2sθ2-l3sθ2sθ3
0001(2)
足端點位置如下式所示(3):
px
py
pz=l1cθ1+l2cθ1cθ2+l3cθ1cθ2cθ3
l1sθ1+l2sθ1cθ2+l3sθ1cθ2cθ3
-l2sθ2-l3sθ2sθ3(3)
3.3 逆运动学求解
运动学正解,得到腿部足端点与各个关节的关系式,现对左右两边进行求导,就可以得到速度与关节角速度的关系(4):
x·=j(q)q·(4)
单腿具有三自由度,即三个舵机,其雅可比矩阵是6×3阶矩阵,前三行代表足端线速度的传送比,后三行代表足端角速度的传送比。
j(q)=-sθ1(l3cθ2cθ3+l2cθ2+l1)cθ1(-l3sθ2sθ3-l2sθ2)-l3cθ1sθ2sθ3
cθ1(l3cθ2cθ3+l2cθ2+l1)sθ1(-l3sθ2sθ3-l2sθ2)-l3sθ1sθ2sθ3
0-l3cθ2cθ3-l2cθ2-l3cθ2cθ3(5)
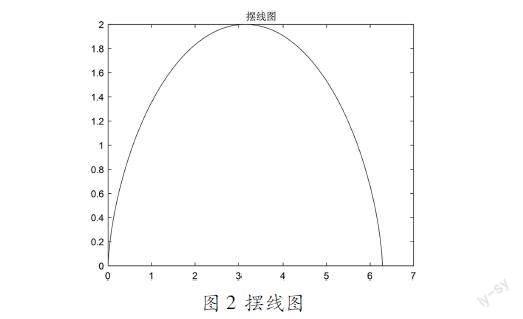
3.4 单腿摆线轨迹规划
单腿的运动轨迹采用摆线的运动轨迹进行初步规划,其函数如式(6)所示:曲线如图2所示:
x=r(t-sint)
y=r(1-cost)(6)
根据摆线轨迹公式,与时间的计算方式可以将曲线化成多个点,即通过运动学的运算方式可以推导出连杆之间的转角,继而可以使单腿的运动形成相似的轨迹。
图2 摆线图
为达到类似于摆动的运动轨迹,设有X方向与y方向位置有一定的要求,即式(7)与式(8)所示:
x|t=0=0
x|t=T2=S
x|t=T=0 (7) y|t=0=0
y|t=T/2=H
y=0 T/2
T(8)
基于式(6)~式(8)所示一个周期内完成从零到S的x距离的动作只需要半个周期,剩下半个周期返回到零的位置,因此对其半个周期进行轨迹研究,从而推导出复合摆线,修改后的摆线方程公式为:
x=s[t/Tm-sin(2πt/Tm)/2π]
y=H[1/2-cos(2πt/Tm)/2](9)
其中s為步长,H为抬足高,Tm为摆动周期的T/2。
3.5 速度与加速度的计算
对与单腿运动速度的计算只需将式(9)对时间求导得到公式为:
dx=s(1-cos(2πt/Tm))/Tm
dy=Hπsin(2πt/Tm)/Tm(10)
在得到的速度公式(10)后对时间进行求导得到加速度公式为:
dx¨=2πssin(2πt/Tm)/T2m
dy¨=2π2cos(2πt/Tm)/T2m(11)
我们可以观察位置、速度、加速度的时间图:y方向的加速度在t=0时刻与t=Tm时会发生加速的阶跃变化,根据牛顿定律F=ma,开始运动时与落地时力会发生突变,因此需要对y方向的运动进行优化。
图3 位置、速度、加速度
3.6 y方向的速度与加速度优化计算
最好的加速度图像是正弦函数图即式(12)所示:
dy¨=Asin(nπt/Tm)(12)
对其进行积分得到函数公式(13):
dy=(ATm(-cos(nπt/Tm))/nπ)+C1(13)
对其摆线对速度约束如式(14)所示:
dy|t=0=0
dy|t=T/2=0
dy=0 T/2
T(14)
求得常数项C1=ATm/nπ。
对速度函数进行积分求得位移函数为式(15)所示:
y=(ATm[t-Tmsin(nπt/Tm)/nπ]/nπ)+C2(15)
根据摆线位置、速度、加速度无法确定A与C2,因此采用分段函数与式(8)即可得到曲线如式(16)所示:
y=2H[(t/Tm)-sin(nπt/Tm)]0
Tm/2
2H[1-(t/Tm)+sin(nπt/Tm)/nπ]Tm/2
Tm(16)
n值根据图4所示,n取4最为合适。
3.7 采用Matlab进行仿真测试
已知轨迹,对其位置、速度与加速进行Matlab仿真可得到如下所示:DH参数设置为:
初始点位置根据三个轴角设定为:-90°、0°、0°。则初始点位置为:0,-57,0;末端点位置设置为:-40,-56,0。
曲线红色代表运动轨迹
4 结论与展望
4.1 结论
采用正运动学、逆运动学与机械臂相关知识,得到初始足端点到达已定的位置时,各个舵机转角可计算出一定的参数实现目标。运动轨迹方程选择复合摆线方程、速度和加速度进行优化后实现冲击小、运动平稳、轨迹光滑的轨迹曲线,使其能够恰当地与四足机器的平稳运动,进而采用Matlab进行仿真。
4.2 展望与不足
本文串联的足轨迹局限于平地与斜面,对于复杂地形需要感知系统,从而在进行实时规划运动轨迹,足抬高以及步长的实时设定,足抬高步长改动后,速度、加速度都有所改变。运动仿真过程中采用Matlab仿真没有具体的参考真实的数据,控制参数都是在模拟情况下进行的,缺乏真实情况以及实验参数。仿真出来的数据以及轨迹未能在四足机器真实应用,缺少验证,复杂地面单足轨迹规划将成为后续研究内容。
参考文献:
[1]常青.四足机器人全向运动规划方法与稳定性研究[D].北京理工大学,2016.
[2]何冬青,马培荪.四足机器人动态步行仿真及步行稳定性分析[J].计算机仿真,2005(02):146149.
[3]李贻斌,李彬,荣学文,等.液压驱动四足仿生机器人的结构设计和步态规划[J].山东大学学报(工学版),2011,41(05):3236+45.
[4]SAKAKIBARA Y,KAN K,HOSODA Y,et al.Foot trajectory for a quadruped walking machine[C]//Proceedings IROS '90.IEEE International Workshop on,July 36,1990,Ibaraki,Japan.New York,NY,USA:IEEE,1990:315322.
作者简介:翟雨(1997— ),男,汉族,陕西咸阳人,硕士,研究方向:机械。