基于STM32非接触物体尺寸形态测量系统的设计与实现
2023-07-10邱萌萌刘瑞徐林沈洋洋
邱萌萌 刘瑞 徐林 沈洋洋

关键词:STM32;openmv4;超声波测距;电源;舵机
中图分类号:TM938 文献标识码: A
文章编号:1009-3044(2023)14-0022-03
0 引言
工业的迅速发展与测量技术水平的提高是密不可分的,尤其是对机械工件的加工精度要求显得尤为重要,其测量技术的发展离不开科学技术的发展,纵观生产发展的历史,伴随着对加工精度要求的提高,测量技术也在不断地完善和发展。
为了高效生产、保护被测物体表面不被划伤,非接触测量技术应运而生,尤其对柔软物体测量较为重要,同时也为机械、计算机、电子和光学产业的飞跃发展奠定了基础,由于它具有非接触、高速度和高精度的优点,因此成为检测技术发展主流方向。
目前非接触测量技术发展如此迅速,主要有以下三个方面:第一是超声波测量技术,该技术应用较多,主要是不受各种环境以及磁场干扰的影响、成本低廉、测量精度较高、运行频率适中等优势,因此超声波测量技术发展较快,但是这种技术也有两面性,其缺点也不容小觑,比如受空气介质、声速等因素影响较明显,鲁棒性差,由于测试电路较为复杂,若要较高测量精度,需要另外多种补偿即可。第二是激光尺寸测量技术,该技术测量精度较高,可达到0.5μm,发展比较成熟,分辨率较高、鲁棒性强,测量范围较广;同时这种技术也存在弊端,即这种技术对设备的结构要求较复杂,成本昂贵,对环境指标有一定的要求,更不便于维护等[1]。第三是图像测量技术,即CCD(ChargeCoupled Devices)是一種传感器件,它具有高分辨率、高灵敏度等特征,在进行测量时,所需机械运动结构比较简单,而且采用非接触式,因此减少了误差存在的源头,特别适用于小尺寸物体的测量有较为明显的优势。
以STM32为控制核心的非接触物体测量系统中,特别适用于小尺寸物体的测量,在工程检测领域体现出明显优势。在非接触测量中利用图像测量技术对小尺寸进行测量可以克服传统测量方法中出现的一些问题,它不仅具有测量精度高、成本低廉、方便维护、操作简单等优点,还能够实现高效率、智能化、动态测量,同时满足非接触测量的需求。因此,将图像测量技术应用于几何测量,是今后几何测量技术的重要发展方向之一。
1 系统的总体架构
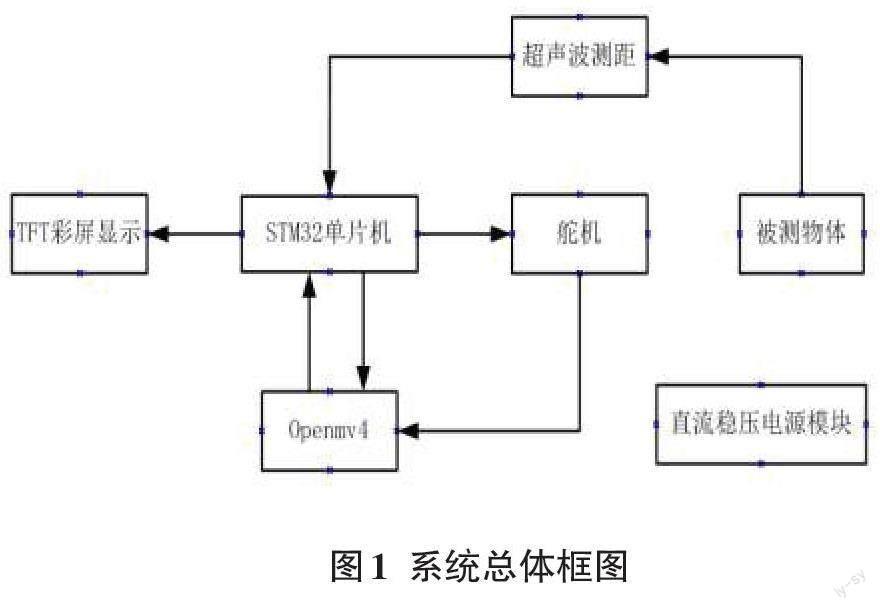
本系统主要由STM32F103型号的单片机作为主控核心、用摄像头作为图像采集模块、利用超声波模块完成测距功能、同时电机及其控制模块实现动态检测、采用的直流稳压电源模块实现系统供电的稳定等模块组成。系统设计方案[2]如图1所示。下面分别介绍所采用的各模块的相关参数。
1.1 主控模块
采用的STM32F103ZET6 作为主控制模块。STM32F103ZET6是一款性价比较高的单片机,存储器内存相对较大,有多个定时器和通信接口,工作频率高,运行速度快。相较于AT89C51型号的单片机虽然具有结构简单、低成本、资源较丰富等优点,但是仅有8位控制器的51系列单片机,由于它的资源有限,运行速度稍显不足,难以存储大体积的程序和实现快速精准的反应控制。由于系统中使用摄像头模块,需要有较快的处理速度,较多的I/O口和较大的存储器内存[3],所以采用STM32 作为主控模块,其封装如图2 所示。
1.2 摄像头
采用OpenMV4摄像头,使用OpenMV4图像处理模块时,由于它是开源、低成本、功能强大的机器视觉模块,可以在单片机中运行,提供Python编程接口,常用算法有相关库提供支持,底层功能无须自己实现,适合快速开发。相较于OV7725 COMS摄像头,它属于数字摄像头,具有高达150Hz帧频率,采用BGA封装,还具有较高分辨率,性能稳定等特点。但是它灵敏度低,不适合高速运行。由于本系统要实现摄像头对物体的快速识别,OpenMV4摄像头更为适合。
1.3 超声波测距
超声波测距广泛应用于各种测距场景。由于其成本低廉,测量精度能够满足大多数场景的需求;虽然激光测距指向性好,测量精度高,并且量程较远,但是激光测距传感器成本高。由于本系统测距只需要3 米左右,为了节约成本,所以选择常用的超声波测距。
1.4 电机
虽然直流电机力矩大,调速范围广,动态特性好,传递函数较为简单,速度快,但只能对转速进行控制,可控性差,较难控制电机停止位置。而步进电机可以实现开环控制,无须反馈信号,适合高精度的控制,使用时短距离频繁动作较佳,但控制复杂、延迟值高、转速慢,扭矩小,且动态特性差,难以处理,不适合实时控制。最终选用的舵机,具有较高的稳定性,控制简单,扭力大,成本低,可以提供更好的精度和更好的固定力量,并且防抖动性能优越,响应速度快,适合实时控制[4]。由于需要在摄像头装置需要在短时间内自动寻找目标后并保持稳定,所以采用舵机来驱动。
2 理论分析与计算
通过摄像头来进行识别所要识别的物体的形状,记录在此位置所占像素的比例如10×10、20×20等,再用超声波测量出摄像头与所测物体的距离,可以计算出像素和距离之间的常数K。从而就可以凭借常数K,计算出在测量范围内任何一处物体的尺寸大小,下面进行不同测量方法与分析。
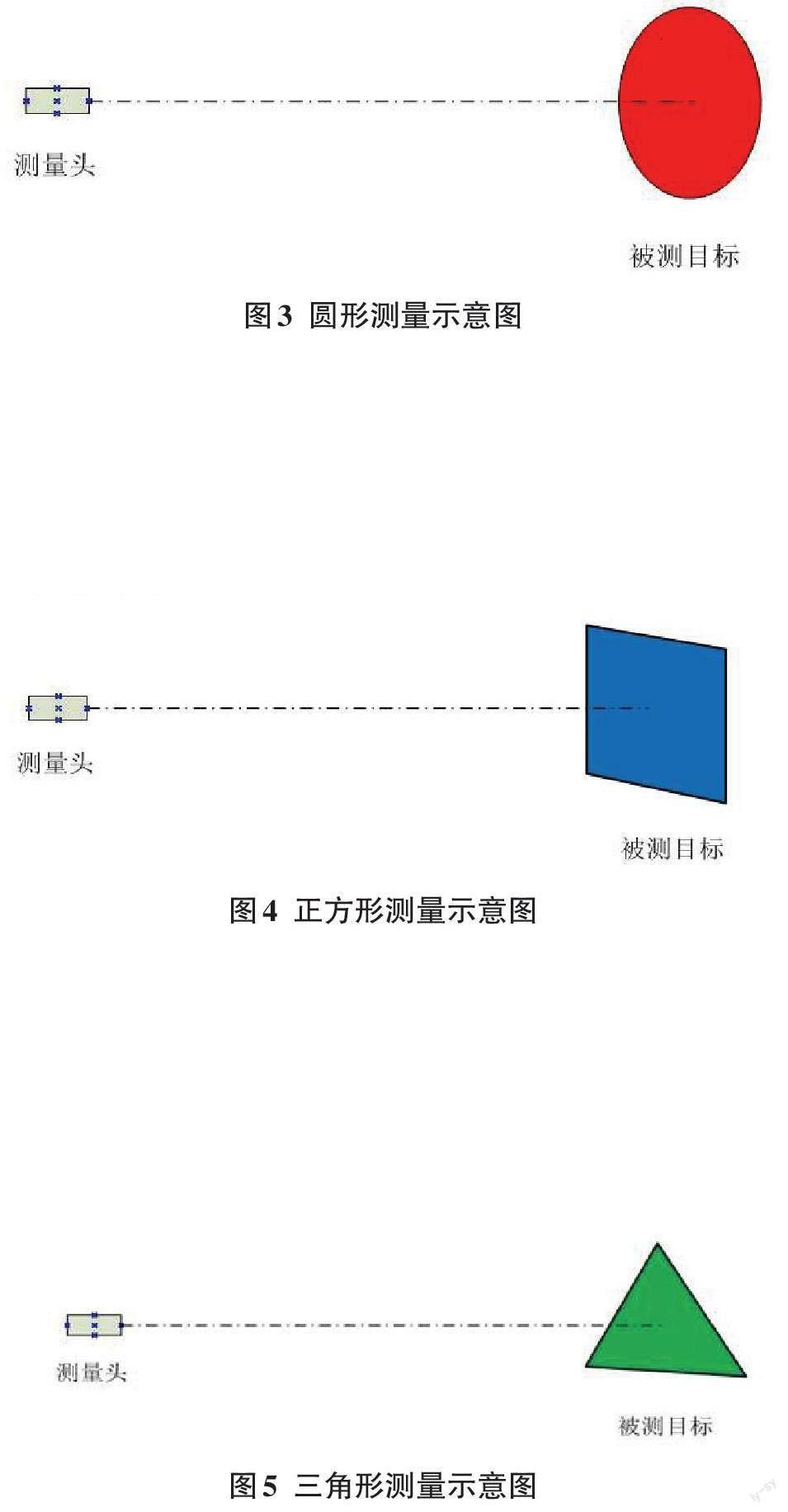
2.1 圆形测量
任意一种颜色的圆形,放置在被测区,按下测量键,摄像头识别被测物体,超声波测距,在TFT彩屏上显示圆的直径,形状和目标与测量头的距离。如图3 所示。
2.2正方形测量
任意一种颜色的正方形,放置在被测区,按下测量键,摄像头识别被测物体,超声波测距,在TFT彩屏上显示正方形的边长,形状和目标与测量头的距离。如图4所示。
2.3三角形测量
任意一种颜色的三角形,放置在被测区,按下测量键,摄像头识别被测物体,超声波测距,在TFT彩屏上显示三角的边长,形状和目标与测量头的距离,如图5所示。
3 各电路模块及原理
3.1 摄像头图像采集模块
镜头首先采集被测物体,并将其生成光学图像,然后将图像投射至传感器,同时转为电信号,再经过A/D转换器转成图像的数字信息[5],最后将数字信息传送至芯片进行数据的处理。Openmv4可以在单片机中运行,并且常用算法有相关库提供支持,底层功能无须自己实现,适合快速开发。因此非常适合物体尺寸形态的测量。
3.2 超声波测距模块
超声波测距与雷达测距原理雷同,它是通过超声波发射器朝向某方向发射超声波,同时开始计时,在传播的途中遇到障碍物立即“反射”回去,当超声波的接收器收到反射波时,立即停止计时,即距离L=vt/2 计算得出[6],如图6为超声波测距原理图[7]。
3.3 舵机模块
舵机的伺服系统由可变宽度的脉冲来进行控制,控制线路是用来传送脉冲,进行控制电机工作。其工作原理是:通过电机工作带动齿轮组,当完成减速后,传动至输出舵盘,由于舵机输出轴和位置反馈电位计相连,因此舵盘转动的同时,反馈电位计也在转动,同时将输出电压信号传送至控制电路板,完成反馈。最终控制电路板根据目标位置决定电机转动及转速,当到达目标位置立即停止[8]。可以实现对摄像头的控制,如图7为舵机原理图。
4 系统测试及结论
4.1测试方案
1)随机选择一个形状的平面目标,放在被测目标放置区的中心线位置上,摄像头识别物体以后,按测量键后开始测量,测量出该目标物体边长、几何形状和目标与测量头的距离,显示在TFT彩屏上。
2)摄像头处于中心线方向,在目标放置区随机选择位置放一个物体,按下测量键后,摄像头装置自动寻找目标,测量出该目标物体边长、几何形状和目标与测量头的距离,显示在TFT彩屏上。
3)随机抽取篮球、排球、足球中的一个,目标摆在目标放置区的任意位置,按下测量键后,摄像头装置自动寻找目标,判断球类品种、测量与球表面最近距离,显示在TFT彩屏上。
4.2 测试结果
为了能够准确清晰地观察到数值,将所做的实验数据汇总,如表所示。
1)按照测量方案1测量,测量结果见表1。
2)按照测量方案2测量,测量结果见表2。
3)按照测量方案3测量,测量结果见表3。
4.3 测试结果分析
从测试结果可以看出,本系统通过摄像头采集物体的颜色、边缘线、所占像素值、再结合测距模块可实现对物体的尺寸形态测量。测距模块在2~3m距离范围内测量准确,摄像头在2~3m距离范围内像素捕捉较为精准,进而两者结合计算出的物体尺寸与实际相差不大。本系统经过数次调试,具有高效率、工作可靠、测量误差较低的优点。
4.4 结论
通過实验表明,本系统可实现对小尺寸物体的测量,甚至是微小工件的测量,它不仅具有测量精度高、成本低廉、方便维护、操作简单等优点,还能够实现高效率、智能化、动态测量,同时满足非接触测量的需求。尤其适用于工作环境复杂、较危险的场合,具有较广阔的应用前景。
