工业机器人关节复合力测量实验装置设计及其教学应用
2023-07-10罗少轩乔爱民王艳春
罗少轩 乔爱民 王艳春


【摘 要】 自主研制了一种工业机器人关节复合力测量实验装置。该实验装置包括复合力传感器、数据采集器和计算机软件,能够直观地实时测量多个轴向的复合力载荷;可以服务于多个实验项目,帮助学生更深入直观地理解工业机器人的工作原理,激发学生的学习兴趣;能够用于机器人工程等专业学生的课程设计、毕业设计课题研究,作为机器人相关学科专业竞赛的辅助训练设备,锻炼学生的实践动手能力,提升实践类课程的教学质量和教学效果。
【关键词】 工业机器人;复合力测量;实验装置;教学研究
Design of Experimental Device for Measuring Compound Force of Industrial Robot Joint and Its Teaching Application
Luo Shaoxuan, Qiao Aimin, Wang Yanchun
(Bengbu University, Bengbu 233000, China)
【Abstract】 In this paper, an experimental device for measuring the compound force of industrial robot joints is independently developed. The experimental device includes compound force sensor, data collector and computer software, which can intuitively measure multiple axial compound force loads in real time. This experimental device can serve several experimental projects, help students understand the working principle of industrial robot more deeply and intuitively, and stimulate students' interest in learning. It can also be used for course design and graduation project research of students majoring in robot engineering, as well as to assist robot competition training, enhance students' practical ability and improve the teaching quality and teaching effect of practical courses.
【Key words】 industrial robot; composite force measurement; experimental device; teaching research
〔中图分类号〕 G642 〔文献标识码〕 A 〔文章编号〕 1674 - 3229(2023)02- 0108 - 04
0 引言
工业机器人目前广泛应用于各类自动化生产设备,其工作原理、内部结构和驱动机制是机器人工程专业学生需掌握的重要内容[1-2]。其中很多知识点比较抽象,特别是对于工业机器人路径规划和控制过程中,需要注意执行机构是否超负荷运行,包括沿各轴向的拉压力和扭矩都应该保持在合理范围之内,否则有可能损坏机器人[3-4]。然而这些知识点是学生难以观测和理解的问题,虽然教师反复强调,但由于缺乏相关实验教学设备,学生课后往往是一知半解,操作时经常犯类似错誤。
为了解决上述问题,急需引入相关实验教学设备,然而市场上与工业机器人相关的实验教学设备往往价格昂贵,而且缺乏针对性,不能完全满足实验教学的需要[5-7]。因此,课程组教师结合实践教学经验,深入研究,自主研制了一种工业机器人关节复合力测量实验装置。该实验装置包括复合力传感器、数据采集器和计算机软件,能够直观地实时观测多个坐标轴的复合力载荷。该实验装置可以服务于机器人传感技术、机器人动力学与控制、工业机器人系统集成等课程的多个实验项目,帮助学生更深入直观地理解工业机器人执行机构的工作原理。
自主研发实验装置,不仅能够丰富课程的实验项目,而且更加有针对性[8];还能对装置中的相关功能进行扩展,作为课程设计、毕业设计的课题研究内容;另外,还可以作为机器人相关学科专业竞赛的辅助训练设备,有助于提高竞赛成绩。这些都为机器人工程专业的实验教学研究提供了新的思路。
1 实验装置的组成及工作原理
本次研制的工业机器人关节复合力测量实验装置主要包括复合力传感器、信号处理变送器和计算机软件三部分。设计过程中,首先需要对工业机器人关节的力学模型、复合力耦合机制、多轴力检测和解耦方法进行研究,通过力学方法建立机器人关节部位的复合力检测模型,并利用有限元方法对模型进行分析和优化。然后利用大量的数据样本建立各方向分力和力矩的数学模型,并对分力和力矩间的相互影响进行特征提取,构造出复合力的解耦矩阵,从而实现对机器人关节复合力实时准确的动态检测。本次自主设计的复合力传感器如图1所示。
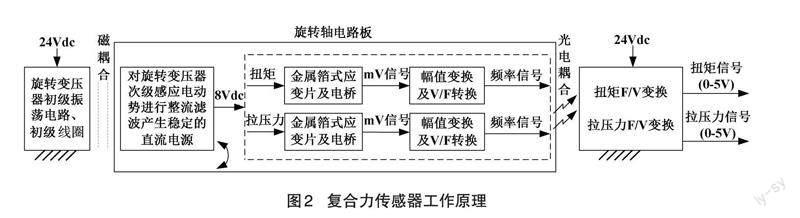
机器人关节复合力检测一个难点是机器人关节在工作时经常会连续旋转,导致传感器和数据处理系统之间不能用线缆连接,否则线缆会往一个方向卷绕而绷断。本次设计中,采用动变压器耦合供电的方式,将动变压器的初级线圈固定在检测装置的外壳上,外壳在工作时始终固定不动;动变压器的次级线圈固定在检测装置内部的旋转轴电路板上,此电路板与传感器的旋转轴固定在一起,工作时随旋转轴一起旋转。传感器内部的信号传输采用光电耦合方式,红外光电发射电路、传感器的信号调理放大电路、电压—频率信号转换电路都安装在检测装置的旋转轴电路板上,工作时随旋转轴一起转动,自主设计的复合力传感器工作原理如图2所示。
本次设计中,复合力传感器的旋转轴上分别设计了用于检测扭矩和拉压力的应变区,其中扭矩应变区采用圆柱式结构,拉压力应变区采用轮辐式结构,如图3所示。动变压器的次级线圈、扭矩应变区、拉压力应变区和信号处理发射电路板都固定在旋转轴上,工作时和机器人的关节一起旋转;动变压器初级线圈和信号接收电路板是固定在传感器外壳上,工作时始终是保持不动的。这样外部供电线缆和信号传输电缆就可以通过传感器外壳上的航空插头接入。
复合力传感器安装在工业机器人执行机构的驱动轴和从动轴之间,传感器的旋转轴通过两个联轴器与驱动轴和从动轴刚性连接。机器人的驱动轴旋转时,会带动传感器的旋转轴、从动轴旋转,而传感器的外壳则是固定不动的,因此通过外壳接入的供电线缆和信号传输线缆也是不会旋转的。传感器输出的是电压信号,因此还需要通过信号变送器转换成数字信号,然后输送到计算机的上位机软件中进行数据处理,传感器的安装方式和信号处理流程如图4所示。
2 实验装置的数据处理
本次设计的复合力传感器的旋转轴上同时存在扭矩应变区和拉力应变区,这两个应变区并不是完全独立的,因此在外部载荷的作用下,两个应变区的输出信号会相互影响。比如,机器人末端受到单纯的扭力载荷时,不仅扭矩应变区会输出信号,同时拉力应变区也会输出一个很微弱的信号;同样的,机器人末端受到单纯的拉力载荷时,拉力应变区会输出信号,同时扭矩应变区也会输出一个很微弱的信号。这种现象就是复合力之间的耦合效应,无法完全避免,但是应该尽量减小这种影响,否则检测精度就会明显降低。
上述耦合效应无法通过结构设计完全消除,因此本次设计的实验装置在上位机软件中设置了解耦矩阵,利用软件算法来减小耦合效应对测量精度的影响,这种方法实现成本低,实际效果也较好。
设未经解耦的复合力传感器初始耦合矩阵如图5所示。
图5中,[M]表示扭矩,[F]表示拉压力,[UM]表示传感器扭矩信号输出电压,[UF]表示传感器拉压力信号输出电压,[CMM]表示传感器受到扭力作用时,扭力对扭矩信号输出电压[UM]的影响系数,[CFM]表示传感器受到扭力作用时,扭力对拉压力信号输出电压[UF]的影响系数,[CFF]表示传感器受到拉压力作用时,拉压力对拉压力信号输出电压[UF]的影响系数,[CMF]表示传感器受到拉压力作用时,拉压力对扭矩信号输出电压[UM]的影响系数。传感器的输出电压和复合力载荷之间的关系可以用公式(1)表示。
为了得到矩阵中的影响系数,需要进行实验分析。实验过程中,在传感器的轴末端单独加载扭力和单独加载拉力,重复多次,然后求出输出电压的平均值,从而得到 4个系数的值,然后再对公式(1)求逆矩阵就可以得到传感器的解耦矩阵,如公式(2)所示。
本次设计中,上位机软件采用Labview编写,主要功能包括传感器数据处理、实时显示测量值、曲线拟合、设置结构矩阵参数、传感器校准、传感器去皮、测量数据存储等。上位机软件主界面如图6所示。
本次设计的实验装置主要用于实验教学,对传感器结构、温度补偿、数据处理、算法解耦等细节都做了相应处理,实验装置能达到的测量参数指标如表1所示。
3 实验教学应用
教育部提倡各本科高校积极自主研发适用的实验教学设备[9-10],本次自主研制的工业机器人关节复合力测量实验装置对于机器人工程专业、电气自动化专业的实验教学研究及改革具有重要意义。不仅能够弥补当前实验教学过程中实验设备的不足,而且还能将教师科研项目中的成果反哺教学,促进教学和科研工作的全面发展。
课程组教师利用此次研制的实验装置,结合教学经验和课程实际,开发了5个全新的实验项目,可用于机器人工程专业和电气自动化专业的三门专业基础课实验教学,如表2所示。
工业机器人关节复合力测量实验装置的教学应用,达到了如下教学效果。
(1)丰富了数门专业基础课的实验教学内容,能让学生更直观地了解工业机器人的工作原理和运行机制,特别是理解工业机器人实际工況中应注意的多轴向载荷限制,强化了学生的工程化意识。
(2)使学生了解工业机器人上所使用的传感器的开发设计方法,引导学生举一反三,激发学生学习兴趣和求知欲,探索更多其他工业机器人传感器的设计和使用方法,锻炼学生的科研创新能力。
(3)由于实验装置是自主研发的,因此硬件、软件都是完全自主知识产权,可以根据需要随时修改。也可作为机器人学科专业竞赛的辅助训练设备和暑期小学期实践课的开源学习设备。
(4)在实验装置的研发过程中,课程组教师有意识地吸纳了部分优秀学生参与项目研究,一方面锻炼学生的科研实践能力,另一方面也培养学生的沟通交流能力和团队合作精神。
4 结语
本次研制的工业机器人关节复合力测量实验装置可以实时同步检测工业机器人工作时,末端执行机构承受的扭力载荷和拉压力载荷,通过上位机进行同步解耦处理和实时显示。为三门专业基础课程提供了5个全新的实验项目,并且还能作为机器人学科专业竞赛的辅助训练设备以及暑期小学期实践课的开源学习设备。本实验装置丰富了机器人和电气自动化专业的实验教学内容,锻炼了学生的实践创新能力,提高了实验课程的教学效果,并为本科高校自主研发实验教学设备提供了新思路。
[参考文献]
[1] 孙松丽,温宏愿.应用型本科机器人工程专业课程体系构建[J].机器人技术与应用,2020(1):44-48.
[2] 苏伯文,赵树平,胡其亮.多平台联动线上教学模式实践研究[J].廊坊师范学院学报(自然科学版),2021,21(2):108-111.
[3] 赵建勇,程亚.工业机器人开放式运动控制实验教学方法[J].制造业自动化,2021,43(11):65-68+80.
[4] 郑雪峰,姚鑫,陳龙.基于OpenGL的工业机器人运动学实验仿真系统[J].实验室研究与探索,2021,40(6):124-128.
[5] 王辉,于立君,胡建,等.智能移动服务机器人实验教学平台研究[J].实验室科学,2020,23(6):98-101.
[6] 马向华,朱丽,赵怀林,等.基于复杂工程的机器人专业创新实践教学模式探究[J].中国现代教育装备,2020(23):83-85+91.
[7] 胡艳丽,伍龙,刘团结,等.基于CDIO+创新班+学科竞赛的电工技术实训改革探索[J].廊坊师范学院学报(自然科学版),2021,21(2):120-124.
[8] 胡静,李安桂,崔海航,等.新型排风罩性能测定实验装置研制及教学应用[J].实验技术与管理,2021,38(11):121-124+129.
[9] 肖建康,杨立.以新实验开发和新实验设备研制培养大学生创新素质[J].教育教学论坛,2018(10):105-106.
[10] 樊英杰.“新工科”背景下物理演示与探索实验的自主开发与创新研究[J].实验技术与管理,2020,37(5):200-202.
[收稿日期] 2022-04-19
[基金项目] 2020年度安徽省高校教学研究重点项目“电子线路设计课程的项目化教学研究与实践”(2020jyxm1145);蚌埠学院新工科教学研究项目“基于柔性生产线系统的电气控制与PLC课程教学改革研究”(2020XGKJY13)
[作者简介] 罗少轩(1980- ),男,硕士,蚌埠学院电子与电气工程学院副教授,研究方向:智能仪器仪表与传感器。