汽车自动驾驶摄像头高精度自动标定检测技术的实现
2023-07-10王晓军刘瀚阳邱艺琪曹迪王金舜
王晓军 刘瀚阳 邱艺琪 曹迪 王金舜
【摘 要】本文主要介紹汽车自动驾驶摄像头高精度自动标定检测技术的原因,分析技术可行性,制定设计方案,对完成设计的方案进行实施,并对自动标定检测设备进行调试、验证,完成汽车自动驾驶用摄像头高精度自动标定检测技术的设计验证工作,实现FOV精度公差最高达到±0.8°的自动标定检测技术。
【关键词】自动驾驶摄像头;自动标定;FOV;6轴精密标定机构;暗角
中图分类号:U463.675 文献标志码:A 文章编号:1003-8639( 2023 )06-0001-02
Implementation of High Precision Automatic Calibration and Test Technology on Autonomous Driving Cameras
WANG Xiao-jun,LIU Han-yang,QIU Yi-qi,CAO Di,WANG Jin-shun
(FAW Car Co.,Ltd.,Changchun 130012,China)
【Abstract】This article mainly introduces the reasons for the high-precision automatic calibration and detection technology of automotive autonomous driving cameras,analyzes the technical feasibility,develops a design plan,implements the completed design plan,and debugs and verifies the automatic calibration and detection equipment. The design and verification of high-precision automatic calibration and detection technology for automotive autonomous driving cameras are completed,achieving an automatic calibration and detection technology with a maximum FOV accuracy tolerance of ±0.8°.
【Key words】automatic pilot camera;automatic calibration;FOV;six axes precise calibration mechanic;dark angle
自动驾驶技术作为汽车智能网联技术的重要组成部分,当前正在快速发展。在自动驾驶采用的零件中,视觉类传感器——摄像头的应用日益广泛。按照传感器制式分类,摄像头分为模拟摄像头和数字摄像头。摄像头在传统的汽车应用中,主要用作倒车影像显示辅助泊车,普通的模拟摄像头足以应对。在自动驾驶应用中,摄像头用于目标识别、图像采集,必须采用高分辨率的数字摄像头。按照功能分类,应用于自动驾驶的摄像头主要有前视摄像头、全景泊车监测摄像头等。其中前视摄像头主要用于辅助驾驶、安全预警、地图景点采集,全景泊车摄像头用于全角度监控驾驶环境,辅助泊车。由于倒车影像的模拟摄像头的分辨率不足(640×800像素或800×600像素),难以满足自动驾驶对高精度摄像头(大于100万像素)的要求,需要采用高精度数字摄像头才能满足要求。
1 影响摄像头精度的因素分析
汽车自动驾驶用摄像头安装位置不同,使用环境复杂,对环境和可靠性要求高。通常摄像头在汽车上安装的区域主要有:前格栅中部、左/右外后视镜、后保险杠、牌照板、前风挡玻璃中部、驾驶舱A立柱护板。针对不同的安装结构,需要设计不同的机械结构,以满足汽车环境对摄像头的性能要求。由于安装位置的不同,对摄像头的视觉效果评价要求也不同,但是还有一些汽车车身由于造型或布置的特殊需要,摄像头不能安装在车身前部或后部的中心点,需要摄像头对图形效果做出修正,修正量根据偏移量的不同,存在差异。根据目前行业对视觉效果的评价要求,要求画面清晰、暗度识别率高,主观评价时要求消除球面效果,消除暗角。
经过对摄像头各性能参数的数据分析,对暗角和视觉效果有直接影响的摄像头性能参数就是FOV(视场角)。而FOV的公差对视角和图像效果产品具有重要作用,公差精度越高,影像采集的图像效果和品质越好。
2 摄像头高精度标定检测技术实现方案及设计验证
为了达到高精度,摄像头在进行产品设计时,需要考虑产品的共性问题,尽量做到产品平台化,这样才能便于制造,保证产品品质。经过分析设计,设计出了平台化摄像头产品。有了平台化的摄像头产品,即可进行智能制造可行性分析。平台化的摄像头具备以下特点:高精度、高可靠性、产品品质稳定。
经过评估,最终确定摄像头的关键制造技术如下:自动装配、自动标定、自动检测、自动固化。本文重点讨论自动标定和自动检测技术,对于自动装配技术不进行讨论。当前摄像头标定技术方案主要有两种:手动标定和全自动标定。手动标定用于对FOV精度公差在±2°~±3°的范围中,标定结果由目视对比确定,精度不高,不符合高精度的技术要求。全自动标定FOV精度公差可达到±0.8°,能够满足高精度的要求。因此,对于高精度标定技术的技术方案采用全自动标定技术方案。
全自动标定技术方案总体设计时需要考虑的因素:工序步骤定义、工艺设备可实现性、成本可控、满足商品批量生产性。经过评估,采用工序如下:自动点胶→自动标定→自动固化→自动检测。设备设计方案:采用3套设备完成自动标定工作。3套设备分别是6轴自动标定机构、自动固化设备、自动检测设备。
2.1 6轴自动标定机构设计
6轴自动标定机构整体以X、Y、Z、? X、?Y、?Z 6轴为基准,自动调整摄像头镜头、前壳体视角范围。首先将镜头与壳体在?X、?Y、?Z 3轴调整到固定范围内,然后在 X、 Y、
Z 3轴微调,以不同的参数进行适配,直至调试到符合技术要求为止。
自动标定机构包括以下构件。
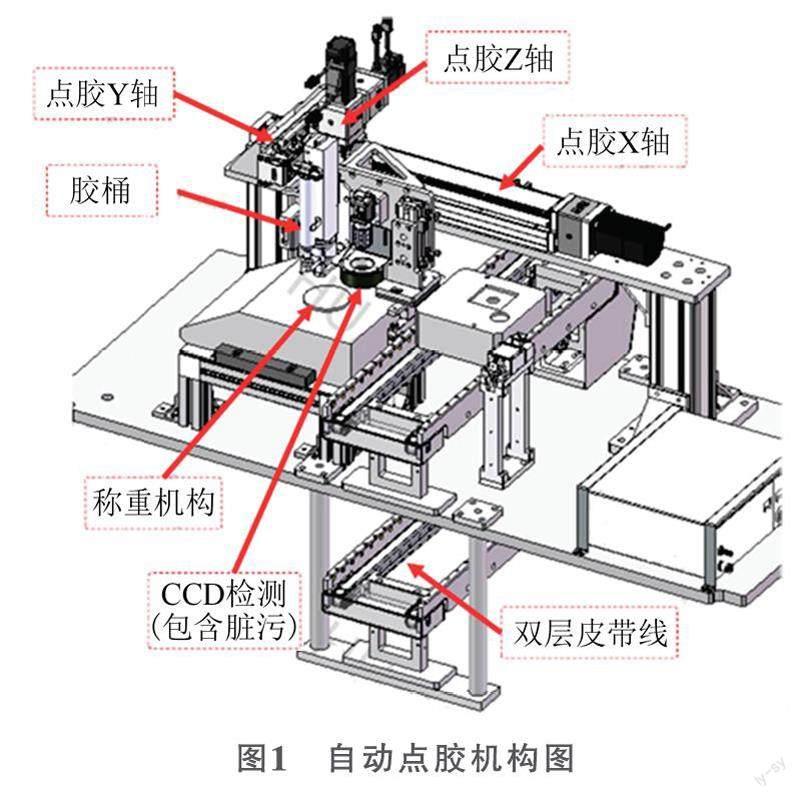
1)一套自动点胶机构。设计方案采用3轴自动点胶方案,用于将胶分别点在镜头和前壳体螺纹处。自动点胶机构见图1。
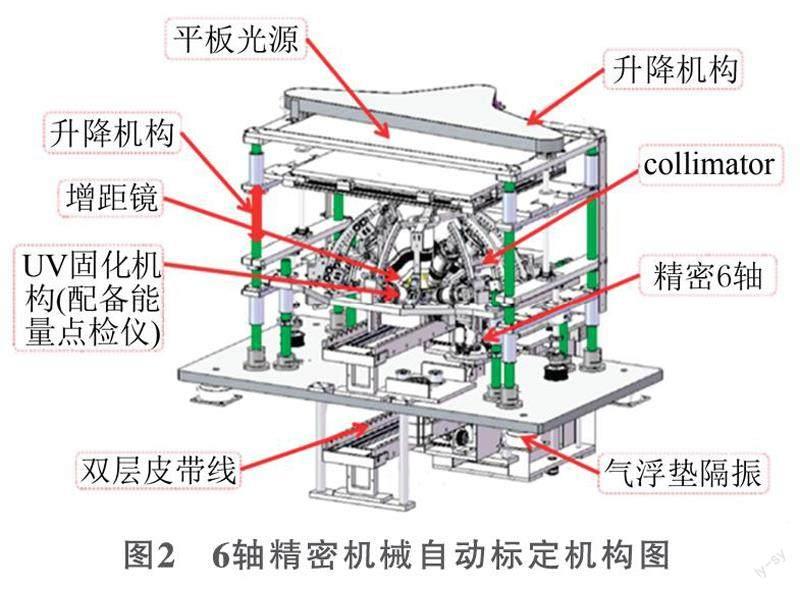
2)6轴精密机械自动标定机构。前壳体固定不动,作为基准点,6轴精密机械滑台带动镜头调整,完成标定工作。2套夹具用于固定镜头和前壳体。光学准直仪,用于提供光源,产生平行光线。其他组成部分包括:自动升降机构、平板光源、增距镜、气动隔振垫、双层传动皮带线、UV固化机等。6轴精密机械自动标定机构设计结构见图2。
设备完成加工制造后,开始进行设备调试。首先调试自动标定设备,根据摄像头对误差的要求,从±0.8°~±2°范围进行调试。根据6轴标定机构参数,分别对X、Y、Z、?X、 ?Y、?Z 6轴参数范围进行初始设定,设定范围如下:①X轴参数,分辨率0.1~0.3μm,微动步长1/5~1/10div,最大运动速度1~3mm/s(10kp/s),运动范围±5~±10mm;②Y轴参数,分辨率0.1~0.3μm,微动步长1/5~1/10div,最大运动速度1~3mm/s(10kp/s),运动范围±20~±30mm;③Z轴参数,分辨率0.1~0.3μm,微动步长1/5~1/10div,最大运动速度1~3mm/s(100kp/s),运动范围±5~±10mm;④ ?X轴参数,偏转角度分辨率≤0.005°,微动步长1/3~1/2div,最大运动速度2°~3°/s(10kp/s),运动范围±3°~±5°;⑤ ?Y轴参数,偏转角度分辨率≤0.005°,微动步长1/3~1/2div,最大运动速度2°~3°/s(10kp/s),运动范围:±3°~±5°;?⑥ Z轴参数,偏转角度分辨率≤0.005°,微动步长1/4~1/3div,最大运动速度15~20°/s(10kp/s),运动范围±3°~±5°。
经过调试,在±0.8°~±2°内标定6轴参数如下:①X轴参数,分辨率0.1μm,微动步长1/10div,最大运动速度1mm/s(10kp/s),运动范围±5mm;②Y轴参数,分辨率0.1μm,微动步长1/10div,最大运动速度1mm/s(10kp/s),运动范围 ±25mm;③Z轴参数,分辨率0.1μm,微动步长1/10div,最大运动速度1mm/s(100kp/s),运动范围±5mm;④ ?X轴参数,偏转角度分辨率为0.0028°,微动步长1/2div,最大运动速度2.8°/s(10kp/s),运动范围±3°;⑤ ?Y轴参数,偏转角度分辨率为0.0022°,微动步长1/2div,最大运动速度2.2°/s(10kp/s),运动范围±3°;⑥ ?Z轴参数,偏转角度分辨率为0.0018°,微动步长1/4div,最大运动速度18°/s(10kp/s),运动范围±3°。
2.2 自动固化设备设计
标定完成后,摄像头本体需要高温固化。自动固化设备设计方案如下:从自动标定机构送出的摄像头本体由机械手抓取,放置到料盘中,当放置的摄像头数量达到料盘存放的最大数值后,由传送带自动传送至高温固化箱中固化。设备完成制造后,开始调试参数,温度参数范围25~150℃,温升速率5℃/s。经过调试,锁定固化参数为60℃。
2.3 自动检测设备设计
完成标定后,需要确认标定结果参数是否符合设计要求,因此进行参数检测,检测参数包括:FOV的X/Y/Z偏离度、中心偏离度以及中心阈值范围等参数。检测设备包含以下构件。
1)全自动检测工装。包括相应的专用夹具,用于固定摄像头本体。
2)专用高精度柔性探针。用于与摄像头连接器段子对接连通。
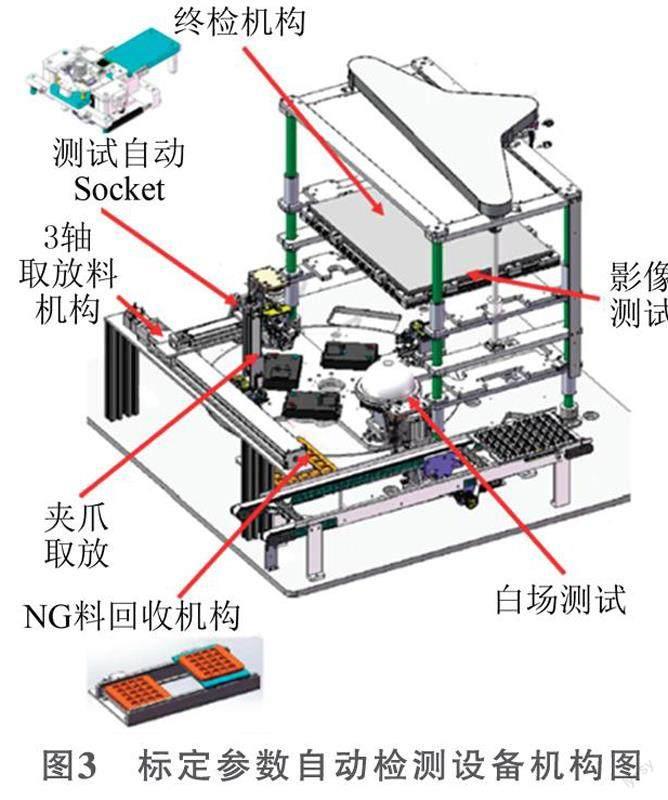
3)测试自动Socket。包括测试专用电路板、数据存储设备,用于与摄像头本体通信、设定调试测试参数、存储测试数据,用于参数检测的专用检测软件。
4)其他組成部分。终检机构、白场测试机构、影像测试工装、3轴取放物料机构。
标定参数自动检测设备机构图见图3。
在所有机构完成设计后,进行加工制造,组装成全自动标定设备,设备外观见图4。
经过联动调试,开始试制工作,制作50套摄像头进行工艺验证。50套摄像头经过自动标定、自动固化、自动检测,产品性能参数符合设计要求,FOV视角公差全部控制在±0.8°以内。详细检测结果见图5。
对50套摄像头进行实车装车评审,评价方式为主观评价,经过评价,图像清晰,无暗角,符合要求。
3 结语
以上介绍了汽车自动驾驶摄像头高精度标定检测技术的实现过程。本次成果已经成功进入商用阶段,应用于奔腾品牌各车型,应用效果较好。通过本次标定检测技术的研究,对提升摄像头产品精度做出了有价值的探索,提升了摄像头产品品质,为摄像头智能制造技术的进一步研究提供了有力支撑。
(编辑 杨 景)
