蛙人水下声信号特性试验研究*
2023-07-05孙玉臣张志强郑师哲孙玉祥孙奉祥
孙玉臣 张志强 郑师哲 孙玉祥 孙奉祥
(1.海军工程大学兵器工程学院 武汉 430033)(2.中国人民解放军92767部队 青岛 266102)(3.中国人民解放军92667部队 青岛 266100)
1 引言
一直以来,水面舰船和潜艇等大型目标是近海沿岸的主要威胁对象。近年来,随着各国军事力量逐步重视“非对称”的作战模式,蛙人等一系列水下小目标将会被用来执行隐蔽侦查和袭击等任务,这将会对我方海上重要设施和人员生命造成严重威胁[1~4]。
目前,各国争相对蛙人水下声信号特性进行研究,从海洋生物目标强度的试验测试到蛙人目标强度的理论建模仿真,一直发展到通过试验对不同装备的蛙人目标信号进行测试和研究[4~7]。2006 年,欧盟水下防御会议对人体反射强度的初步模型进行了讨论与建模,给出了蛙人在频率100kHz 时的目标强度为-25dB左右的结论[3]。美国史蒂文斯理工学院通过大量的试验,发现蛙人呼吸调节阀上的低压阀和高压阀产生的振动是引起蛙人水下声信号的直接原因[8~12]。自21 世纪初,我国相关机构也开始投入对蛙人水下声信号的研究。中科院声学所联合哈尔滨工程大学对蛙人声学特性展开一系列研究,总结出蛙人声辐射信号频率的显著特点:一是吸气声产生频率较高,大部分集中在2kHz~13kHz 之间,呼气声产生频率较低,大部分集中在200Hz~2kHz之间[13~16]。
许多国家已经在实战中运用主动式声呐探测和识别水下目标,但是主动方式存在探测虚警率高、目标识别的效率低等缺点[4]。另外,受制于混响等因素,主动式声呐的部分关键技术在某些复杂浅海无法得到充分发挥。而蛙人的被动式探测与识别技术则是开发蛙人探测声呐的另一个重要选择[1]。本文根据被动探测声呐的工作原理,设计了蛙人水下声信号数据采集的试验方案,针对采集到的蛙人水下声信号,对其时域、频域及时频谱等信号特点进行了分析,希望能够为蛙人探测研究提供一定的依据。
2 试验介绍
我们以携带开式潜水呼吸器的蛙人为研究对象,根据蛙人被动式警戒声呐探测原理,组织蛙人以不同的姿态进行水下活动。试验设计了数据采集试验平台,搭建了以水听器为接收源的采集系统,对蛙人的呼吸信号进行了数据采集。
2.1 试验场地
国际标准恒温泳池,水池尺寸长×宽×深为50m×25m×4m,池壁及池底为瓷砖。
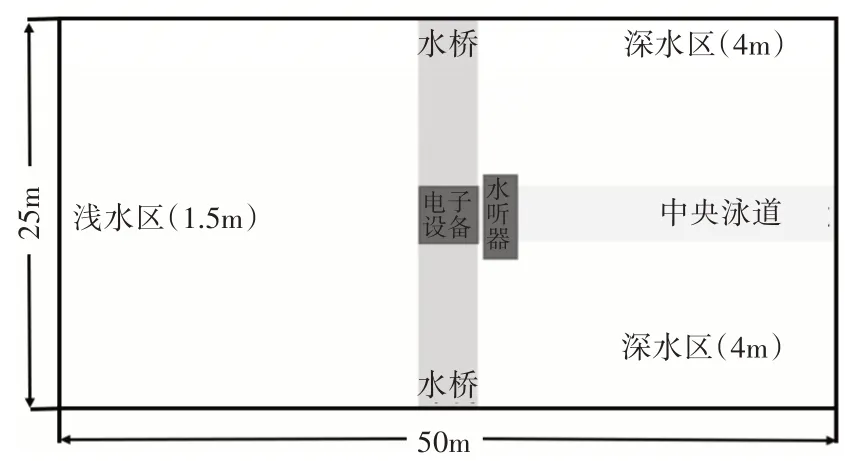
图1 试验场地平面图
2.2 试验仪器
1)自研水听器样机
采用4只自研水听器进行测试(依次对应1号~4 号水听器,每只水听器15m 电缆,不带外罩,灵敏度-167dB@1kHz)。
2)标准水听器
标准水听器4 只(依次对应5 号~8 号水听器),每只水听器15m 电缆,不带外罩,频率范围10Hz~100kHz,灵敏度-208.9dB@1kHz)。
采集仪为HIKIO 16 通道采集仪,每通道采样率128kHz。
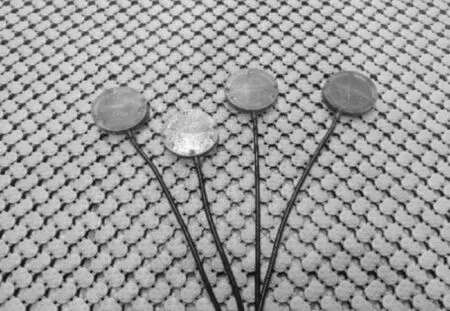
图2 自研水听器实物图
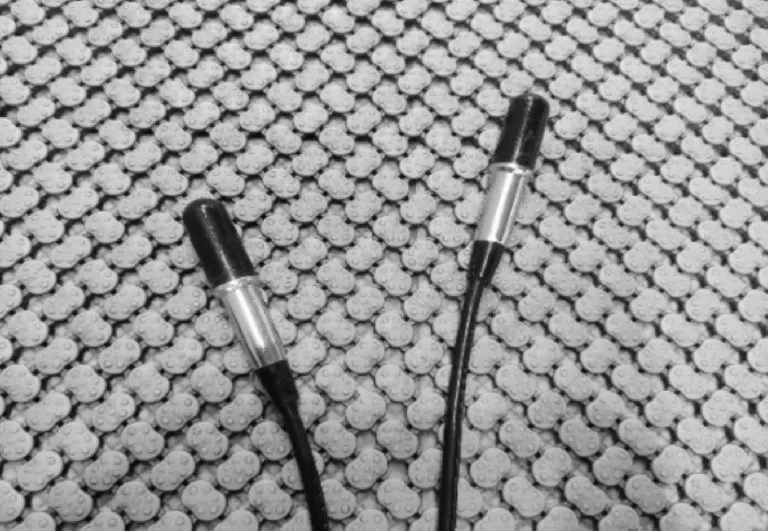
图3 标准水听器实物图

图4 采样仪实物图
2.3 试验环境
水温30.0℃,蛙人身高175cm,体重66kg,身材匀称,着开式湿式潜水服。在进行试验前,蛙人提前5min 入水适应泳池环境,待心率和呼吸稳定后开始试验。
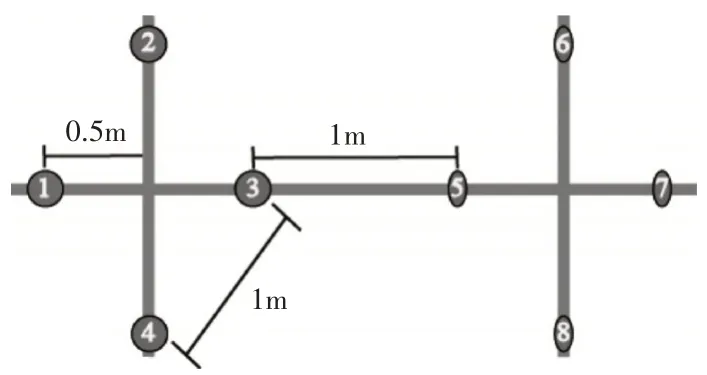
图5 水听器基阵设计图
2.4 试验平台搭建
基阵总体呈双“十”字型排列,其中1号~4号为自研水听器,5号~8号为标准水听器,8只水听器处于同一水深。基阵中相邻阵元距离1m,整套基阵长3m,宽2m。
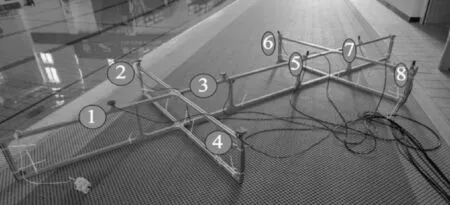
图6 水听器基阵实物图
水听器座底放置,靠中央池壁0.3m,为避免混响干扰,水听器距水底0.3m。
2.5 试验条件与变量
试验测试了蛙人在不同状态下的水下声信号。首先,采集泳池纯环境背景噪声信号,提取蛙人下水前和刚出水的声信号,此项测试两种状态,持续时间75s,每种状态测三次。其次,测量单个蛙人在水中悬浮时的静止信号。蛙人定深2m悬浮于泳池中,提取蛙人距离基阵5m 和20m 时的水下声信号。此项测试共两种状态,持续时间75s,每种状态测三次。最后,测量单个蛙人游动声信号。蛙人定深2m 在泳池一端及基阵之间来回游泳,提取蛙人游动时的水下声信号。此项测试共一种状态,持续时间75s,测三次。
3 信号处理
3.1 蛙人信号时域特点
我们对水池中纯环境背景噪声信号、目标悬浮时及游泳时声信号分别进行时域处理,形成的结果见图7。
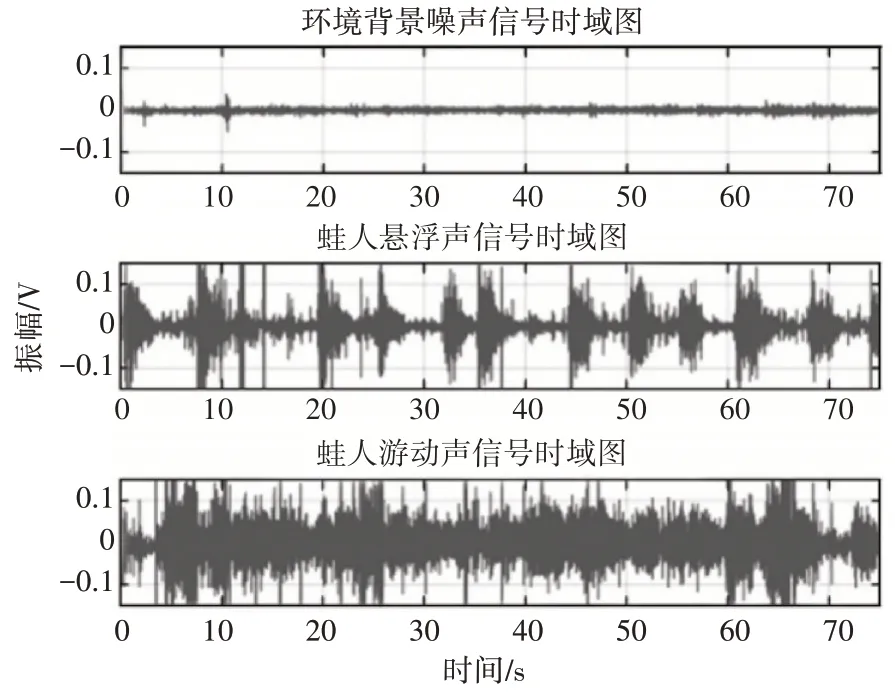
图7 信号时域图
1)试验所用水池背景噪声水平较低,目标信号明显。目标悬浮时的信号波形周期显著;目标游泳时的信号较复杂,没有明显的周期。
2)目标悬浮时,呈现出明显的周期,该周期与人类生理性呼吸周期相吻合。
3)目标游泳时的信号强,对蛙人呼吸信号造成了干扰。从时域图可以看出,目标游泳信号的波形是连续且无明显周期的,游泳的信号强度接近呼吸的信号,目标呼吸信号波形的周期已不能明显分辨。
3.2 蛙人信号频域特点
对水池中纯环境背景噪声信号、目标悬浮时声信号及目标游泳时声信号分别进行快速傅里叶变换,提取频域波形,分析奈奎斯特频率(64kHz)以内的频域波形图可以发现:
1)水池背景噪声:在64kHz以内的背景噪声整体水平较低,但始终有4.1kHz的噪声。
2)不论是在悬浮时还是游泳时,目标信号强度主要集中于7kHz以内。
3)目标在水下,不论出于何种状态,有较高信号强度的频段为1.4kHz~1.7kHz频段,3.5kHz~4.5kHz频段,46kHz~48kHz频段。
4)仅在目标游泳时,35kHz 频率附近信号突出,这与瑞典国防研究所的研究结果相吻合[18]。
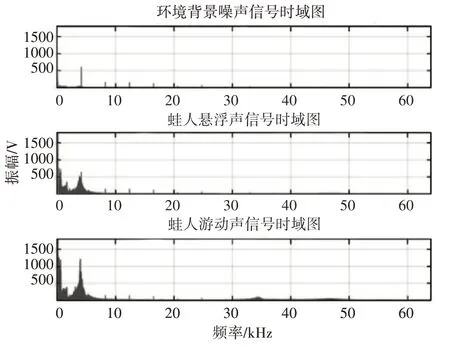
图8 0Hz~64kHz频段信号频域图
3.3 蛙人信号时频谱特点
时频谱通过谱图颜色的冷暖或深浅来体现信号的强弱,通过时频谱图分析可以发现:
1)水池背景噪声:在64kHz以内背景噪声整体水平较低,但在4.1kHz频率附近及600Hz以下频段有较强的噪声,可能会干扰目标信号。
2)目标在水下的呼吸周期明显,吸气信号遍布于64kHz以内,目标信号强度主要集中于7kHz以内。
3)相比背景噪声信号,目标在水下的信号在3.5kHz~4.5kHz频段及46kHz~48kHz频段内较强。
4)在64kHz以内,目标游泳时的信号强度普遍高于悬浮时。
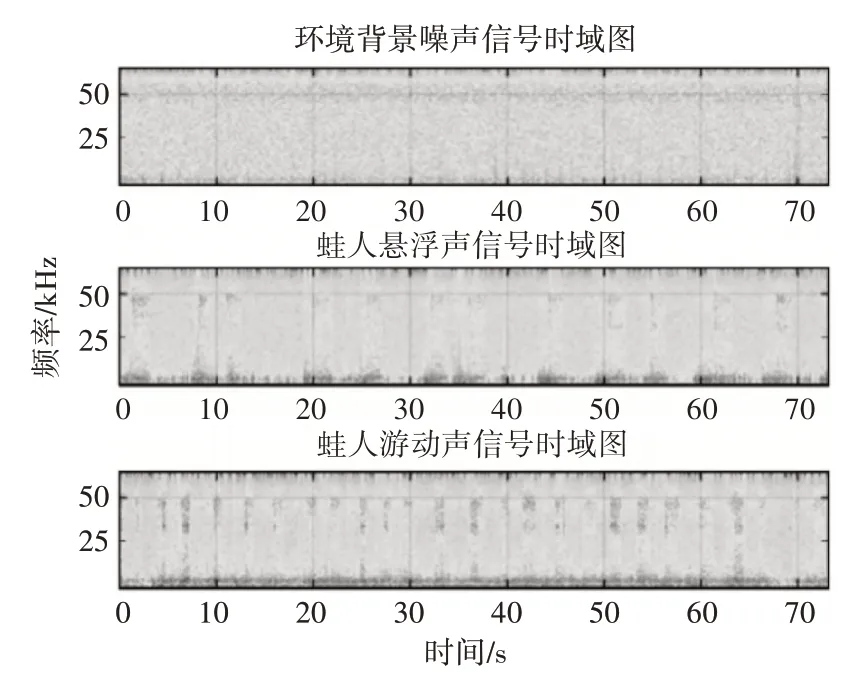
图9 0Hz~64kHz频段信号时频谱
4 结语
本文使用声呐被动探测方式,采集了不同状态下的蛙人水下声信号,研究了蛙人水下声信号在时域、频域和时频谱方面的特点,分析了蛙人水下声信号产生的基本原理。我们发现:
1)在时域上,所测试的水池背景噪声整体水平较低,蛙人悬浮时产生的声信号呈现周期性变化,周期约为3s,与人体生理性呼吸基本一致;游泳时波形连续但无明显的周期性变化,信号强度接近呼吸信号。
2)在频域上,始终有4.1kHz 的背景噪声,当蛙人游泳时,35kHz 频率附近的信噪比突出;不论蛙人悬浮还是游泳,在1.4kHz~1.7kHz 频段、3.5kHz~4.5kHz 频段和46kHz~48kHz 频段上都具有较高的目标强度。
3)在时频谱上,4.1kHz 频率附近及600Hz 以下频段有较强的背景噪声,蛙人的吸气信号分布于64kHz 以内,目标信号强度集中于7kHz 以内;相比于背景噪声信号,蛙人的水下声信号在3.5kHz~4.5kHz频段以及46kHz~48kHz频段内较强;在64kHz以内,蛙人游泳时的信号强度普遍高于悬浮时。
后续对蛙人信号的探测还需要考虑以下几点[18]:
1)优化布置蛙人水下探测声呐的基阵布局,提升系统探测效率。
2)提高终端软件成像界面的可视化程度和人机工作效率。
3)减少外界环境对声呐探测产生的干扰,提高探测的信噪比。
虽然国内对蛙人水下警戒声呐系统的研究才刚刚起步,但也取得了不少的科研成果。做好重点海域水下安保工作以及防止敌方蛙人对我重要设施的突袭破坏,是我国蛙人水下探测与识别声呐的研究重点,也是未来水声技术发展的重要方向。
