基于Adams的高空气球动态发放动力学仿真
2023-07-03李艳博张泰华张冬辉王梓皓
李艳博,张泰华,张冬辉,王梓皓
(1. 中国科学院空天信息创新研究院,北京100094;2. 中国科学院大学,北京100190)
1 引言
高空气球是一种由聚乙烯薄膜制成、无动力推进、随风飘浮的浮空器。高空气球的飞行系统一般由球体、结缆和吊舱等组成,吊舱内载有平台控制器、压舱物和科学载荷等。作为一种高空运载平台,高空气球的飞行高度高、成本低、驻空时间长、载重大、噪音小、易于实施等特点使其在科学探索、验证试验和通信应用[1]等方面得到了广泛应用。美国NASA、法国CNES、日本JAXA、欧洲ESA等知名航空航天科研机构每年都大量使用高空气球作为临近空间科学试验的载荷平台,取得了一系列的创新成果[2]。
高空气球的发放过程是指在大气浮力作用下,将高空气球与系统搭载的载荷从地面放飞至空中。高空气球的发放过程是否顺利关系到高空气球科学试验的成功与否,是试验的关键步骤,国内外发放大型高空气球时使用较多的发放方法是动态发放方法,该种方法是大型高空气球发放成功率较高的一种方法。
国内外有关高空气球发放过程的研究较少,研究主要集中在高空气球发放过程中球底拉力及结缆张力的变化等问题。顾逸东院士在1996年提出了一种通过建立简化二维模型对球体系统升起过程的计算模拟方法,模拟出了球体系统升起过程中气泡(球体在地面充气所具备初步外形的部分)底端张力的变化[3]。该方法虽然具体地计算出了发放过程中球体底部的张力,但是无法准确表达出球体系统的三维模型在发放过程中的变化情况。Yukihiko Matsuzaka等人在高空气球发放试验中也发现了发放过程中系统存在冲击过载问题,并通过建立力学模型对摄像机记录的数据进行了分析[4]。虽然Yukihiko Matsuzaka等人注意到了高空气球发放过程中系统冲击过载这一关键问题,但是他们并没有针对动态发放过程中的系统冲击过载进行具体研究。
本文针对一次高空气球动态发放试验中出现的吊舱触地情况进行了分析,实际试验中,吊舱底部的回收缓冲装置在发放车的发放头打开后与地面发生了局部碰撞,但最终发放顺利完成。在已有现场试验数据的基础上,本文利用Adams建立了一种高空气球动态发放系统动力学模型,使用离散多刚体单元与柔性连接的方法对结缆部分进行了动力学建模,达到了简化高空气球动态发放系统模型的目的,提高了仿真计算与分析的效率,为高空气球动态发放参数和发放时机的选择提供了参考依据。
2 动态发放系统理论模型
在高空气球动态发放过程中,主要利用滚筒与动态发放车[5]固定球体系统,发放时打开滚筒使球体系统上升至接近竖直状态,动态发放车根据现场情况调整位置与姿态,同时发放车打开发放头释放球体系统使其自由上升,完成发放[6],如图1。其中,动态发放车前端的发放头打开并释放球体系统是发放阶段的关键步骤,这一步骤决定着球体系统的升空姿态,也决定着发放试验的成功与否。

图1 高空气球动态发放示意图
考虑到高空气球动态发放的安全性,气球的释放过程一般是在气泡竖起后,球体气泡与发放车的发放头约束点呈一定角度时释放,释放瞬间发放头打开,球体系统的结缆部分拉直张紧。现将模型简化如下:假设球体气泡与发放头约束点在竖直方向的夹角为θ,气泡与发放头约束点之间的结缆段为l1,发放头约束点与吊舱之间的结缆段为l2,如图2。

图2 球体系统被发放车约束状态
对于发放头约束点,在水平与竖直方向上有
T0sinθ=Fc
(1)

(2)
其中,Fc为发放头约束点对结缆的约束力,T0为结缆段l1的张力,ms为吊舱质量,ρl为结缆密度,Dl为结缆直径。
在发放头打开后,夹角θ开始变化,结缆底端连接的吊舱开始摆动,根据其初始夹角θ0,可以得出吊舱摆动的向心加速度为
(3)
假设地面风风向为沿球体发放水平方向,球体气泡底端在水平与竖直方向上的运动可以分别表示为

(4)

(5)
其中,ρ为空气密度,Cdfx、Cdfy分别为空气对于球体气泡在x、y方向的阻力系数,Sax、Say分别为球体气泡在x、y方向的气动投影面积,vw为地面风风速,Cwf为地面风对于球体气泡的阻力系数,Saw为球体气泡对于地面风的气动投影面积。
3 动态发放系统动力学建模
本文利用Adams软件的View模块建立了高空气球发放系统的动力学模型。仿真分析主要针对动态发放中发放车的发放头打开后球体系统的运动及吊舱触地的过程,为了提高计算效率,动力学模型的初始状态设置为高空气球竖起后等待动态发放车移动发放的状态。
3.1 系统模型的建立
动态发放系统的三维模型主要包括球体、球束(球体充气结束后尾部未成形部分)、降落伞、结缆、吊舱、动态发放车、发放跑道,如图3。为了将模型简化,系统的球束、降落伞部分均设置为与结缆相同的模型,通过调整计算模型的气动力函数[7]体现其不同的性质。

图3 Adams中高空气球动态发放系统模型
3.2 结缆单元的设置
在Adams动力学分析中,通过微元化的方法将结缆绳索离散单元化[8],每一段结缆单元均为细长刚性杆,相邻两杆间由球铰运动副相连接,由此将结缆处理为开链式的多刚体系统。
假设Ln为离散结缆单元中第n个结缆单元的长度,On-1、On分别为第n个结缆单元的两个端点,xn、yn、zn分别为第n个结缆单元在惯性坐标系Oxdydzd中的坐标分量,则结缆单元结点的坐标递推关系如下

(6)
其中θn为第n个结缆单元与坐标系中Oxdzd平面的夹角,φn为第n个结缆单元在坐标系中Oxdzd平面上投影与Oxd轴的夹角,如图4。

图4 结缆单元的几何描述
对结缆单元结点坐标递推关系式求导处理,得到结缆单元结点加速度的递推关系如下

(7)
结缆单元间球铰运动副的连接采用刚体柔性连接[9]的方式,以此达到简单建模、高效计算的目的。柔性连接的力和力矩的计算公式[10]如下

(8)
其中,Fx、Fy和Fz为x、y、z轴方向的力分量值;Tx、Ty、和Tz为x、y、z轴方向的力矩分量值;x、y和z为x、y、z轴方向的两结缆单元连接点之间的相对移动位移分量值;a、b和c为x、y、z轴方向的两结缆单元连接点之间的相对转动位移分量值;K和C为刚度系数与阻尼系数;Vx、Vy和Vz为x、y、z轴方向的两结缆单元连接点之间的相对移动速度分量值;ωx、ωy和ωz为x、y、z轴方向的两结缆单元连接点之间的相对转动速度分量值;F1、F2和F3为x、y、z轴方向的初始力分量值;T1、T2和T3为x、y、z轴方向的初始力矩分量值。
3.3 模型运动副约束的设置
模型采用的运动副约束设置均能与发放试验中系统的各部分连接及运动关系对应,约束的设置主要为以下几个部分。
3.3.1 球体系统各部分之间的约束
球体与球束在实际试验中是一体的,而球束与降落伞、降落伞与结缆之间是通过绳索及相关构件连接在一起的,所以在仿真时这几个部分之间的连接采用球铰的方式,即允许相邻两者之间的三个转动自由度,限制相邻两者之间的三个移动自由度。
3.3.2 结缆与吊舱之间的约束
结缆与吊舱之间为绳索的连接方式,吊舱被固定连接在结缆的底端,所以在仿真中该连接采用球铰的方式,即允许结缆与吊舱之间的三个转动自由度,限制两者之间的三个移动自由度。
3.3.3 结缆与发放车之间的约束
实际试验中,结缆是被发放车的发放头所固定的,在发放时发放头打开,解除对结缆的约束,放飞球体系统,所以在仿真时使用固定副将结缆与发放车吊臂头部连接,限制其三个转动自由度与三个移动自由度,在发放时刻再将该固定副去除,放飞球体。
3.3.4 发放车与跑道之间的约束
跑道即地面,在模型中用固定副将其与大地Ground固定在一起。发放时发放车需要以一定速度朝着发放方向前进,所以发放车与跑道之间采用平移副的连接方式,即允许一个移动自由度,限制其它五个自由度。
4 仿真条件与控制设计
在动力学模型的约束设置好之后,给其设置仿真的初始条件及控制部分。

(9)

(10)
5 仿真结果与对比分析
将初始条件设置完成后对模型进行动力学仿真分析。从仿真结果可以看出,发放头打开后,吊舱部分在跟随球体系统升空摆动的过程中与地面产生了接触,与实际试验结果相同,如图5。

图5 仿真模型的吊舱部分(与跑道发生了接触)
通过仿真得出发放头打开时刻吊舱质心的三轴加速度,并且与实际试验测得的吊舱三轴加速度进行了对比,仿真结果的吊舱三轴加速度峰值分别为10.12g、5.46g、2.14g,真实试验测得的吊舱三轴加速度峰值分别为8.96g、4.48g、2.89g,忽略发放车行进中在地面颠簸对整个系统的影响,两个结果的过载突变与过载峰值比较接近,结果对比如图6-图8所示。

图6 吊舱x轴加速度对比

图7 吊舱y轴加速度对比

图8 吊舱z轴加速度对比

图9 气泡底端x轴加速度对比
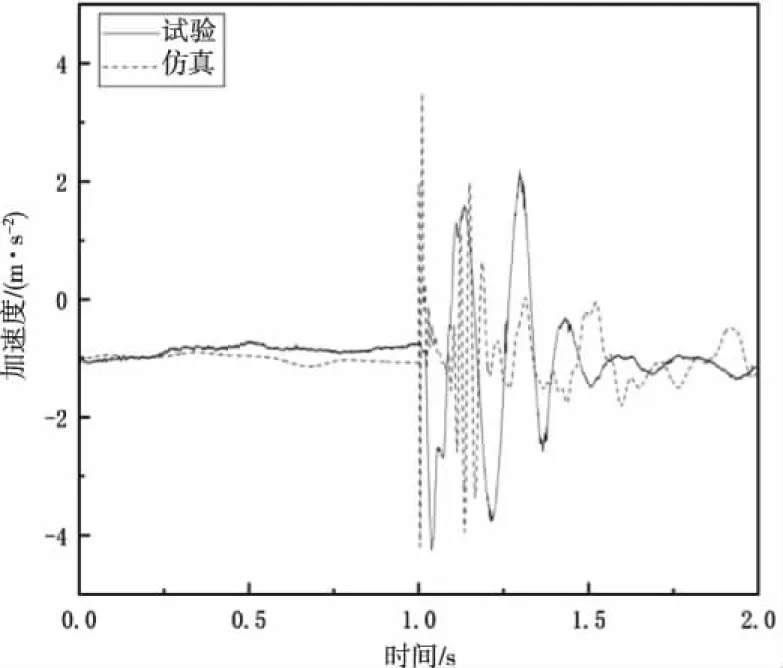
图10 气泡底端y轴加速度对比

图11 气泡底端z轴加速度对比
除此之外,通过测量计算模型,得出仿真结果中气泡底端结点的三轴加速度,与实际试验测得的气泡底端的三轴加速度进行了对比,仿真结果的气泡底端三轴加速度峰值分别为0.94g、4.20g、1.40g,真实试验测得的气泡底端三轴加速度峰值分别为0.77g、4.25g、1.08g,忽略发放车行进中在地面颠簸对整个系统的影响,两个结果的过载突变与过载峰值也是比较接近的,结果对比如下。
其中,在仿真与实际试验中,系统的竖直方向均为y轴方向,球体系统水平移动方向均为x轴方向。通过比较上面的结果,可以得知本文利用Adams建立的高空气球动态发放系统动力学模型是较为准确的。在实际试验中,测量数据难以避免突变测风的影响,这也是该仿真模型中需要细化修正的地方。在此基础上,可以通过改变模型的风场条件及发放车行进条件等来探索发放试验的优化方案,以此确定高空气球发放的最佳时机,进而避免试验中吊舱触地情况的发生。
6 结论
本文应用Adams对高空气球的动态发放过程进行了动力学仿真分析。针对一次出现吊舱触地情况的真实试验,利用Adams建立了该动态发放系统的动力学模型,使用离散单元的方法建立了结缆的多刚体系统模型,并通过设置与真实试验相同工况的参数条件,复现了发放试验中发放车的发放头打开释放球体系统这一关键过程。经过仿真结果与试验测量数据的对比,验证了本文所提出的动力学模型的有效性,为高空气球动态发放过程的研究提供了参考。在本文动力学模型仿真分析的基础上,可以进一步分析地面风风况、结缆材料与长度、发放车移动速度等重要因素对球体系统过载的影响,为高空气球动态发放的优化设计提供依据。
