职业教育学生项目化教学案例研究—以搭建基于PLC 控制的智能化禽舍试验台架为例
2023-07-01马静
马静
(新疆天山职业技术大学,新疆 乌鲁木齐 830017)
0 引言
课程项目化教学是近年职业本科院校积极推行的一种教学模式,教学过程以学生为中心,项目为载体,多学科理论知识为依据,在项目推进的同时输出理论知识,培养了学生的职业素养和成就感[1]。职教改革实施方案中指出自2022 年起实践课程原则上不少于课程量的50%[2]。职业教育“手脑并用,做学合一”的理念早期由教育家黄炎培等人提出,目的是培养符合国家需要的实用型技能人才[3]。项目化教学应用于各学科领域,通常以“任务驱动、目标主导、理论辅助”[4],理论与实践研究已趋于成熟并不断延伸,在工业领域培养出一批职场“大国工匠”[5]。不少职业院校对项目化教学进行了实践,深圳职业技术学院就高职《机械设计基础》课程进行项目化教学实践,以校企合作模式进行,项目难度随年级升高逐渐提高,将课程知识按项目化教学分解、重构并实施教学,效果明显[6]。邵阳职业技术学院向浩对电气控制线路装配与调试课程进行了项目化实施,分析了教学法和教学模式等,展示了创新性教学方法及教学成果,激发了学生的学习兴趣[7]。
对于智能禽舍的研究,Raden[8]等人通过嵌入式技术利用传感器实时检测禽舍NH3含量及舍内温度。黄佳[9]对家禽生长环境系统进行了包括环境信息检测和检测数据传输的网络结构建设,可将监控数据显示在LCD显示屏上。刘洽[10]对散养家禽舍的环境监控以PLC为基础进行了系统研究,以多种传感器、执行构件和远程终端等模块设计了禽舍控制系统,实现了移动端对执行机构的控制处理及自动化养殖。
1 项目化教学实施基础
智能制造专业群项目实训教学注重学生编程、三维建模及工程实操,对设计和工艺分析等均有培养与体现[11],多学科交叉,多种加工方式并行。学校智能制造专业群实训设备完善,有六自由度机械臂、数控加工中心、普通车床、镗床、走丝电火花切割机床、激光打印机、3D 打印机、电子实训设备等辅助工具,可满足课程项目化实训教学需求。
项目化教学在我校职业本科层次学生中反响强烈,随着项目的实施不断深化理论课程,发现问题及时解决,教学过程中师生共同做中学、学中做,以考核的形式促进学生积极参与,实施效果明显。
2 项目实训综合设计
2.1 教学目的及实训准备
小规模养殖设备智能化程度较低,结构设计和环境监控存在问题。通过对内环境控制进行建模和改造,可实现养殖智能化。
2.1.1 教学目标
(1)进一步熟悉机械基础课程中机械零件的应用,掌握三维建模中从零件绘制、装配体协调组合仿真、工程图导入与基本标注内容。
(2)熟悉PLC 指令语言使用、子程序逻辑组合协调运行。
(3)掌握传感器模数转换计算应用,熟练操作3D 打印机实现制定模型打印。
(4)了解基本数控加工方式等教学内容,以最终实现装配试验台架运行为任务导向。
实训过程中3D 打印利用PLA 材料等可实现复杂异变零件的塑性成形[12],数控等机加工根据指令完成切、钻、铣等操作。
2.1.2 教学过程
整个教学过程如下:成员组合--项目实施对象讨论--任务分工--文献资料查阅--项目具体开展执行--中间环节疑问解决--成果展示。以最终实现装配试验台架运行为任务导向,将课本中大量理论知识融入项目教学活动,尽可能地减少学时。
2.2 实训项目机械结构原理
项目实训成果为智能化禽舍试验台架(图1),其体积为0.125 m3,基于Solidworks 建模、S7-200 SMART PLC 编程控制,由太阳能电池供电实现自动化运行。设计控制系统使用PLC 实现自动监控,将理论课程应用于实践设计中,实现经济节约智能化、自动化改造。

图1 家禽舍整体结构
试验台架主要由电气控制系统机架,主体机械结构包括清粪输送带,食槽内有输送饲料无轴螺旋搅轮和内部底网设计清粪集蛋系统组成。整体结构如图1。
图1 中家禽舍门前侧储食桶定点定时排下饲料至食槽内,无轴螺旋输送实现饲料输送。其中搅轮、食槽和储食桶由学生通过CAM 模式三维建模并进行3D 打印。
2.3 整体电气布控
电气控制部分配合机械框架设计,试验台架以STEP7-MicroWIN 编程软件编写PLC 程序,明确系统的控制顺序,设计自动控制主程序包括计数指令、定时器控制灯光启停、温度调节等;食槽饲料均匀输送带定时输送粪便采取联动定时控制,以及由步进电机驱动的清粪集蛋系统。设计的控制系统如图2,PLC 主程序如图3。在实训过程中学生了解了具体要实现的动作指令,布置任务自行查阅相关资料,借助设备实现子程序功能,再综合连串。
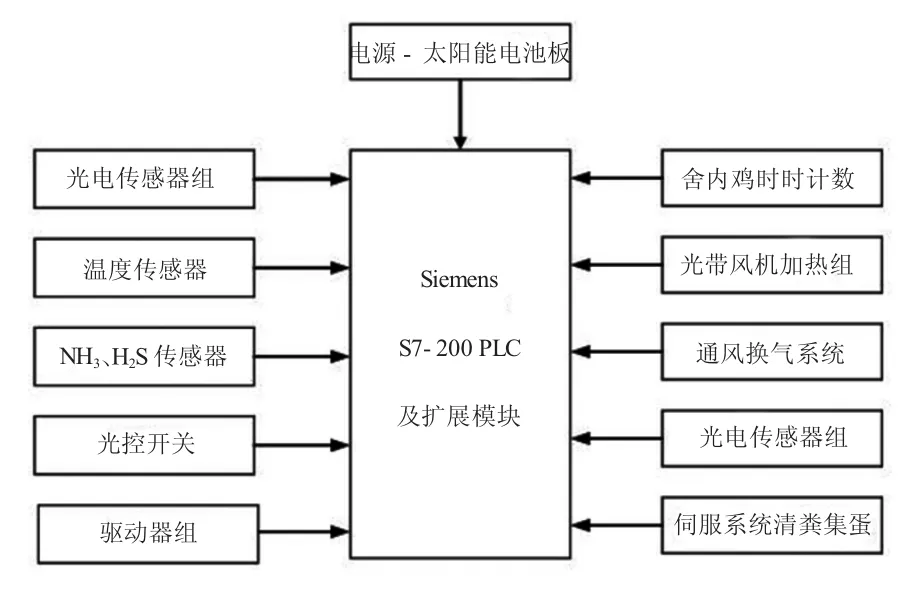
图2 控制系统结构图

图3 PLC 主控制程序
整体系统包括清粪集蛋系统、实时家禽数量统计系统和温控系统。根据基于LED 光照环境中光照强度对肉家禽生理行为影响的相关研究,设计禽舍光源补色为橘黄光[13],之后设计饲料均匀输送机构等部件。
2.4 关键结构设计
2.4.1 清粪集蛋系统设计
清粪集蛋系统如图4,推杆在伺服驱动带动下沿底网平面做往返运动,初始状态推蛋杆在禽舍门口下方,工作时伺服电机逆时针旋转90°沿底网斜面前进,推蛋杆与底网无间隙,将家禽蛋推至集蛋槽内,返程时伺服电机顺时针旋转90°,清粪刷向下与底网接触将底网上的杂物清除。
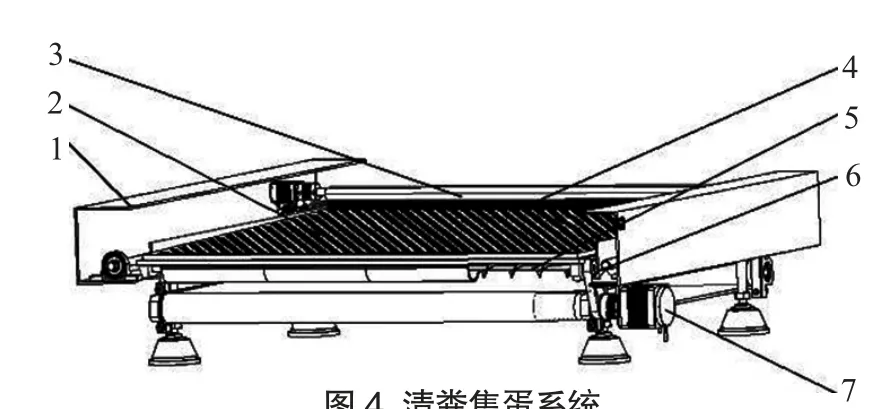
图4 清粪集蛋系统
以上动作完成底网清扫和底网上推杆推蛋动作,经学生多次试验,为保证家禽蛋完好无损伤,调整推杆前进运动速度为0.02 m/s,电气系统顺序动作,底网下方清粪布随电机旋转将排泄物倾倒在一侧,方便集中收集。集蛋槽内装柔性搅轮,搅轮一侧轴端与帆布同步带连接,清粪同时通过搅轮将槽内家禽蛋从另一侧排下。为保证搅轮工作稳定性,电机线速度调整为0.05 m/s[14]。推杆、搅轮均由学生通过三维建模操作数控加工设备或3D 打印设备完成。
2.4.2 数量统计
家禽数量统计系统的原理如图5,利用光电传感器反应次数检测禽舍家禽数量。具体为将两个光电传感器分别安装在舍门外侧和内侧,传感器接收端对准门口通道并保持水平,相对距离约300 mm。传感器型号为洛施达M12 微小型红外激光漫反射光电传感器(NPN 型),单头检测距离150 mm,稳定性强,受日光灯和太阳光亮度影响小,数据精准。

图5 禽舍家禽数量统计
光电传感器工况时常开,家禽进入禽舍时“,1”“、2”先后接收信号,家禽外出时“,2”“、1”顺序接收信号,即:顺序1-2 进,2-1 出,进入数量总和与出去的数量总和的差为舍内家禽的数量,如式(1)
式中S—舍内家禽数量,n—进入舍内家禽数量之和,m—从禽舍出去的家禽数量之和。
将上述逻辑计算进行基于STEP 7-MicroWIN 平台以Siemens SMART-200 PLC 控制器等硬件基础编写家禽计数梯形程序,1,2 传感器对应自增计数器INC,每次增1,之后减法指令SUB 将通道1 数据减去通道2 数据,其差值即为舍内家禽数量。最后通过MOV_DWS 双字节指令显示SUB 结果。对于特殊应用场景下的处理,采用系统重置措施,计数归零重新开始。
2.4.3 保温与通风换气设计
引导学生理论结合实际,各类环境参数设定要结合实际养殖情况。通过查阅相关文献得知禽舍内温度低于13 ℃或高于30 ℃时都会导致产蛋率降低、饲料消耗下降[15]。采用合理横向间歇性通风方式可以使室内温度变化差值控制在2 ℃以内[16],安装通风扇,借助PLC 利用有害气体浓度传感器阈值设定控制间歇通风,采用机械式温控器,使内部温度可在13~30 ℃范围内调节[17],连接风机加热器,低温时铝壳体加热扩散效率突出。利用PLC 程序定时器间歇控制加热器工作实现供暖,维持内部环境适宜温度。图6 为项目实训禽舍试验台架。

图6 项目实训禽舍试验台架
3 实训效果
课程实训过程中学生任务分工明确,充分发挥主观能动性,相互配合,是教学活动的“主角”,教师是辅助项目推进的“配角”,项目式教学中学生边学边做,鼓励学生参加各类竞赛,随进度推进有意识地提高制作质量、增强时间观念,培养了学生综合思维及合作意识。
通过搭建基于PLC 控制的智能化禽舍试验台架综合项目实训课程的实施,培养了智能制造专业群学生在数控加工、3D 打印技术、CAD 绘图、Solidworks 建模和PLC 编程等方面的操作与应用,对机械基础、电机拖动和传感器应用等理论课程理解均有加深,提升了专业认知与实践能力。
4 结论
项目化教学突出了职业教育的优势,以项目为载体,学生为中心,通过师生合作,让学生亲身实践专业技能与知识。同时项目化教学可以培养动手能力强、创新能力强、工程思维全的应用型人才。但项目化教学还存在诸多问题,实施过程尚需结合相关政策、专业师资及学科特点等方面进行综合考虑。
