一种组件化的无人机机动模型设计与实现
2023-06-27郭子卉王学文岳忠奇谢斌斌
郭子卉,王学文,岳忠奇,谢斌斌,付 浩
(北方自动控制技术研究所,太原 030006)
0 引言
信息化时代背景下,作战仿真训练系统是当前研究军事作战活动的有效手段。军用无人机作为现代空中军事力量中的一员,具有无人员伤亡、使用限制少、隐蔽性好、效费比高等特点,在联合作战中配合各兵种参与火力支援、战场侦察、电子对抗等作战任务,逐渐成为了不可或缺的作战主体[1]。因此,在仿真作战系统中,构建无人机仿真模型成为作战仿真模型研究的重要方向,而机动模型作为任务行动中最基本的行为模型,是作战仿真训练的基础。
组件化建模作为近年来发展的建模方法,不但能够解决模型开发工作量大的问题,同时也是增强模型互操作性和重用性的有效手段。本文的仿真环境使用Xsim5.0 可扩展仿真平台,该平台为国产化仿真平台,支持组件化建模技术。苏玉婷等运用Xsim3.2 平台进行了战术机动的基本构建[2],刘波韬等也基于Xsim4.5 平台对榴弹炮模型进行了开发设计工作[3],并且都得到了良好的实验结果。本研究以无人机为模板,首先采用EATI 建模方法对无人机实体模型进行概念设计,通过编写概念模型模板对描述对象及其动作过程和军事规则给出一个集中和规范化的描述;其次对空中机动行为进行描述设计,并基于组件建模技术,以固定翼为例,开发无人机空中机动组件,实现空中机动行为;通过模型组装工具将无人机实体进行组装,并在想定编辑工具中部署实体,最后通过仿真推演来验证了模型的可用性与合理性。
1 组件化建模
组件化建模方法区别于传统的建模方式,不再以实体对象为中心,而是以组建为核心,采用“组件化”的思想,将实体对象的功能和属性单独封装成原子组件。组件通过共享数据和控制指令的形式传递信息[4],模型通过开放的接口接收数据,执行相应的任务。仿真建模时,只需要根据实体对象的实际需求,将不同功能和属性的组件与实体进行组装完成建模。组件化建模技术在每次新建模型时无需从头开发,而是以模型组装的方式直接形成仿真应用模型,同类型的组件还可以根据实际修改参数形成新的组件复用到模型中,增加了模型的可重用性,在很大程度上提高了建模效率,节省了模型开发的工作时间。
组件是对武器装备或作战系统中最小可分辨单位进行建模。按照建模对象的功能类别,组件可以分为平台组件、通信组件、机动组件、武器组件、认知组件、行动组件、传感器组件和辅助组件等几大类,每类组件则对应一类特定功能的组件,它不能脱离实体模型运行。
实体模型是组件模型的组合,每类实体对应一种军事总体设计中模型体系的一类叶子模型,同类实体模型具有统一的模型框架,基于该框架,开发各类实体模型。
2 模型设计
2.1 实体描述
2.1.1 实体元描述
利用EATI 方法对无人机进行建模[5],以单个无人机为最小的作战单元模块,对无人机实体展开具体描述,实体元模型可通过四元组进行表示:
式中,N 为实体标识,描述实体的名称;TE 为实体执行任务;AT 为实体属性的集合;AC 为实体动作的集合,无人机实体元模型的具体描述如表1 所示。
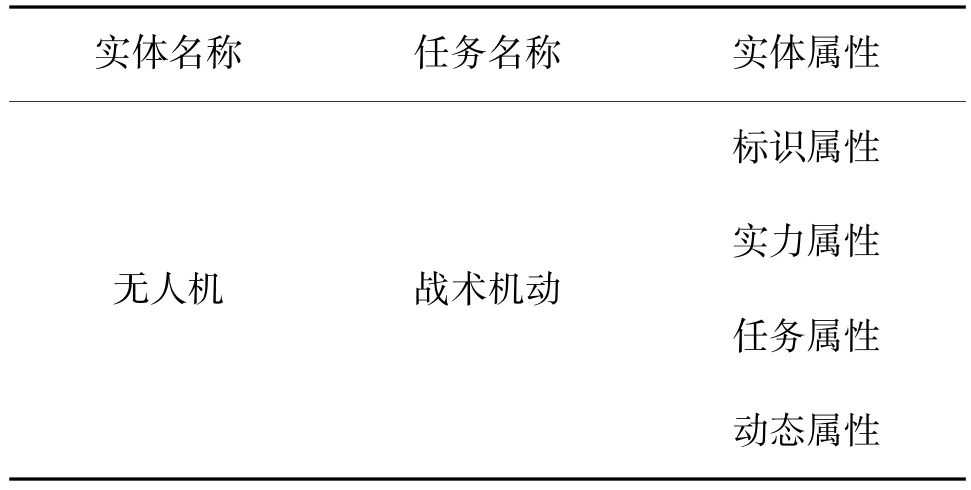
表1 无人机实体元模型Table 1 Entity meta-model of UAV
2.1.2 动作元模型描述
动作是由实体模型执行的,主要对模型主体所涉及的所有动作行为及其功能进行描述。动作元模型可以通过五元组进行表示
其中,ACN 为动作名称,表示每一个原子行为模型的名称;ACFS 为功能段,表示每一个动作所完成的具体功能;ACIS 为输入信息,表示每一个动作的出发条件;ACOS 为输出信息,表示动作执行完成后的输出信息;ACCS 为控制段,描述相关行为动作的规则。具体描述如表2~表3 所示。
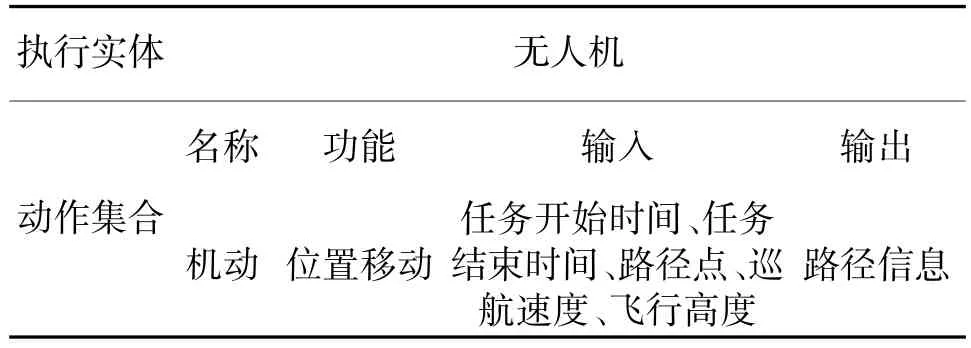
表2 无人机动作元模型Table 2 Action meta-model of UAV
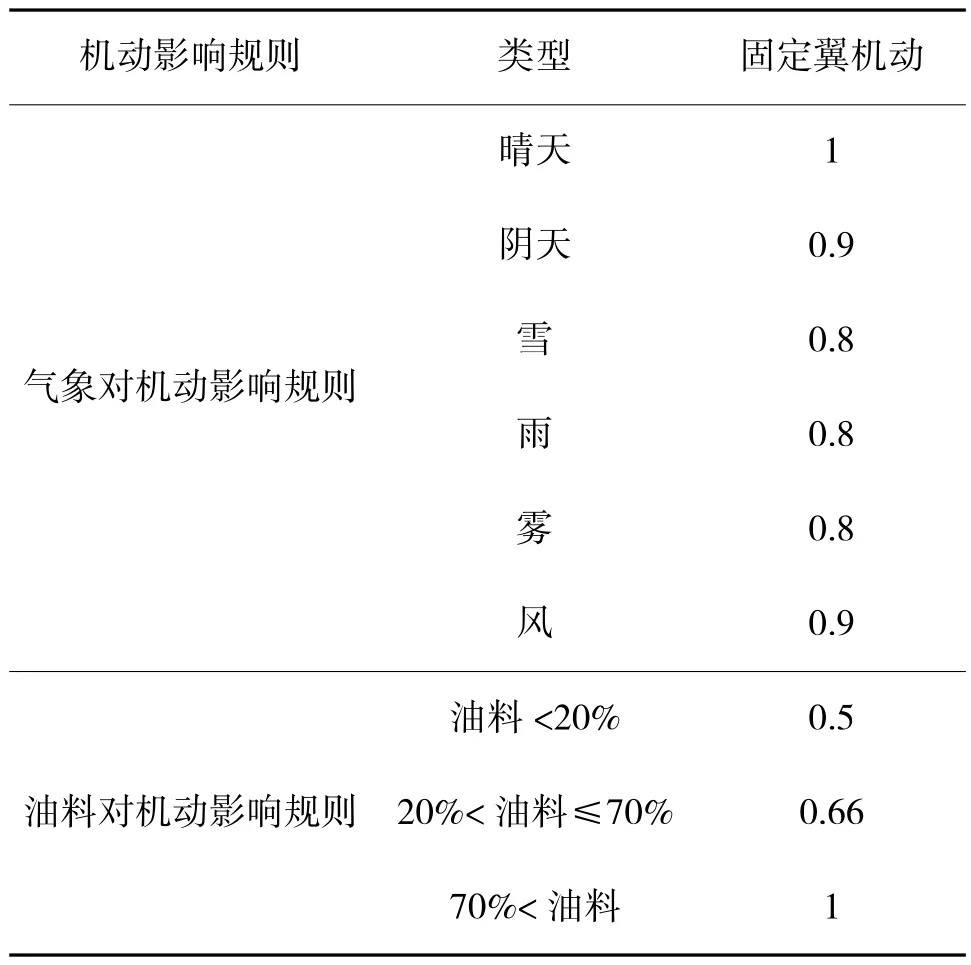
表3 机动系数修正表Table 3 Maneuver coefficient correction table
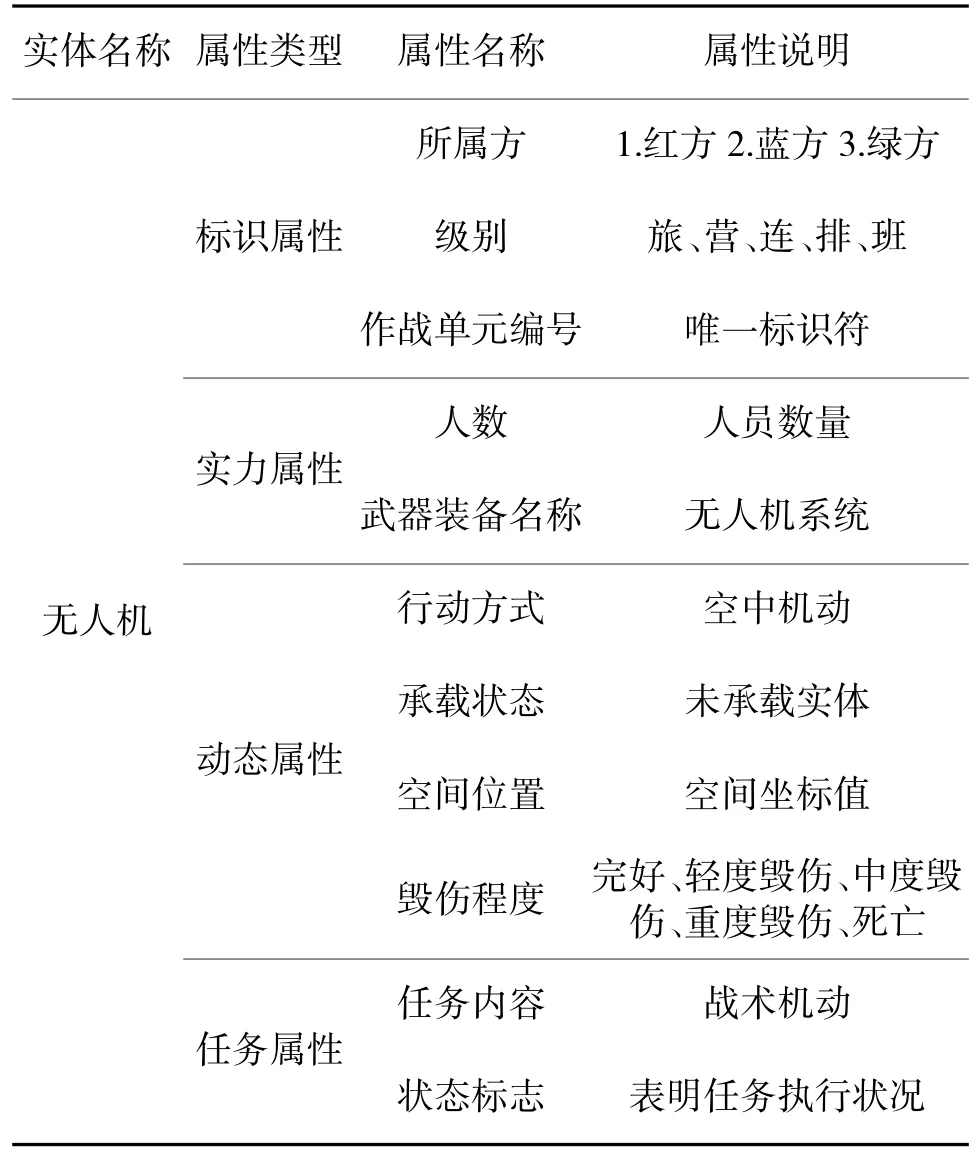
表4 无人机属性元模型Table 4 Attribute meta-model of UAV
2.1.3 属性元模型描述
属性元模型(AT)表述实体模型的各种属性[6],通过四元组表示:
其中,ATIS 表示标识属性段,主要描述模型所属方、级别和唯一标识符;ATOS 表示实体的实力属性包括组成人数、装备数等;ATDS 为实体的动态属性,描述模型的承载状态、行动方式、空间位置、毁伤程度等;ATTS 表示实体的任务属性,表示该实体模型执行任务的内容,状态标志等。
2.2 实体模型设计
根据无人机的结构组成和作战需求,无人机模型需要具备空中机动、侦察和通信等功能来满足作战任务的基本需求,因此,无人机实体搭载的组件模板主要包括空中机动组件,传感器组件和通信设备组件。空中机动组件的作用是通过模拟无人机运动状态,实现无人机实体运动过程仿真。以机动组件模板为基类,通过重写关键方法类开发出适用于无人机的空中机动组件;传感器组件主要实现无人机对目标的探测功能,是探测设备的基类,用于探测设备的仿真。不同的探测设备都是在通用类传感器组件模板的基础上,根据各类设备功能属性的不同,例如探测距离,探测范围大小等,扩展而成的多种类别的探测设备组件;通信组件是通信设备组件的基类,提供了通信设备开关机标志、加入的网络列表等基本属性和方法。通信设备组件是仿真作战实体间信息交互所需的物理设备,实现实体对通信信号的收发及处理能力,如无线电台、路由设备等。无人机实体模型设计图如图1 所示。
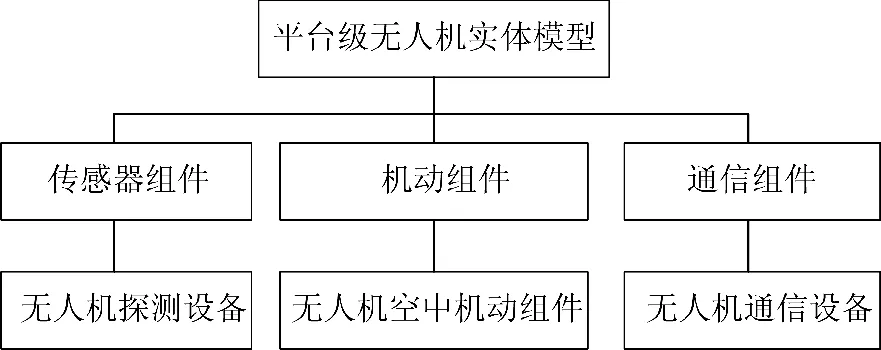
图1 平台级无人机实体模型设计Fig.1 Entity model design for platform-level UAV
3 固定翼机动组件开发
3.1 固定翼机动模型描述
空中机动模型由指挥员下达机动命令后开始执行,模型开始需要判断接收单位的实体是否为生存状态,若单位实体为死亡状态则停止任务,发送任务调度失败报告;实体存活状态判断结束后进入任务参数判断检查,检查是否正确输入路径点、任务开始和结束时间,若输入的任务参数有误或者缺少输入信息,则任务终止并发送任务调度失败报告;在任务调度成功后,获取机动组件的最大机动速度和机动周期,获取高程、天气等环境数据进行速度修正;在执行任务过程除考虑到环境因素外,增加了是否遇敌和油耗的判断,并根据判断来进行机动速度的调整和机动目的地的调整[7-9],模型的实现流程如图2 所示。
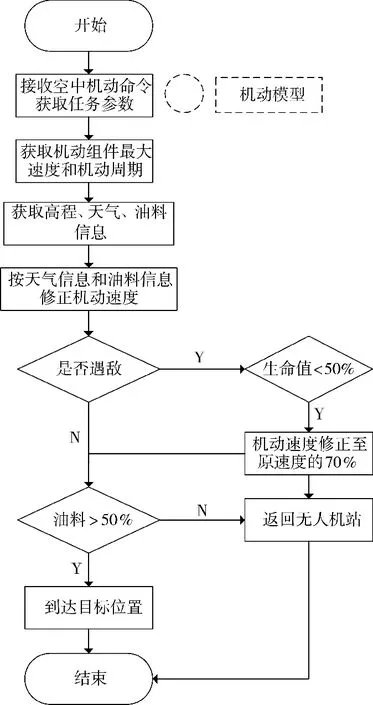
图2 机动组件实现流程图Fig.2 Flow chart of mobile component implementation
3.2 固定翼机动组件开发
基于Xsim5.0 的建模机制,在模型开发阶段,主题作为数据的载体进行存储与传输。所谓主题,概括来讲为功能名称和数据结构的结合体,主题通过发布和订阅模式进行数据的产生和消费。模型的静态数据即基础数据和初始化主题数据以主题的方式存储,并保存在模板以及想定之中。模型的动态数据由各功能性组件在运行时产生并公布在域中,用于数据交互。因此,在机动组件开发阶段,首先需要创建机动组件的初始化信息主题和定义基础数据主题,梳理空中机动组件所需要的相关属性并确定基础数据内容,再根据功能需求完成模型关键方法的实现,最后在模型开发完毕并正确编译后打包发布模型。
3.2.1 无人机基础信息结构
无人机固定翼机动组件主要描述无人机在战场环境下的运动过程,针对平台的运动进行建模,如机身的运动。固定翼机动组件继承机动组件基类,通过提供的接口,设定的机动参数及属性完成对机动的处理。
无人机固定翼机动组件定义了机动的初始化数据和基础数据的结构以及初始化数据和基础数据的主题,其定义格式如图3 所示。

图3 定义机动组件主题Fig.3 Define mobile component topic
固定翼机动组件通过继承的方式,在原本的机动基础数据如机动的最大速度、积分步长的基础上又新增了巡航速度、飞行高限、飞行低限、能源配置等相关数据属性,如表5 所示。
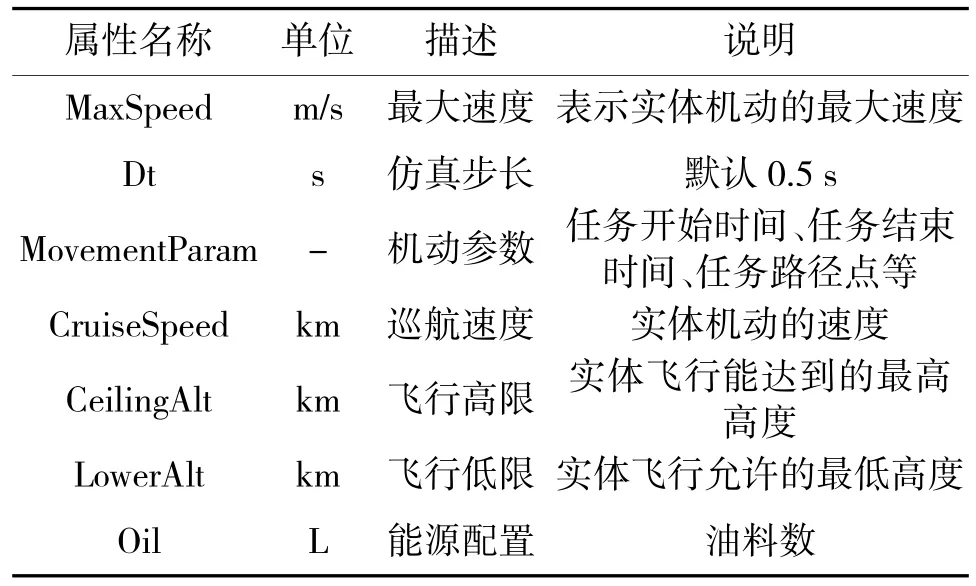
表5 机动组件属性表Table 5 Maneuver component attribute table
3.2.2 位置解算
在固定翼机动组件模型的构件中,无人机实体起飞时模拟了机动匀加速直线运动的过程,采用沿机动点的机动方式进行位置解算。在无人机速度达到设定的巡航速度时,实体按照给定的速度,在相同的时间段内向指定的方向运动相同的距离,按匀速直线运动机动,实体位置更新机制公式如下:
式中,P1表示下一时刻的实体位置坐标;P0表示实体的当前位置坐标;P0Pt表示P0与P1的直线距离;v为实体速度;ΔT 表示仿真步长。
3.2.3 路径规划
固定翼机动模型在该位置更新机制的基础上,结合战场地形环境因素,在模型中考虑了路径规划的问题,将基于蛇优化智能算法的三维路径规划算法引入到机动模型组件当中。
蛇优化算法(SO)是2022 年HASHIM F A 和HUSSIEN A G 两位教授提出的一种基于蛇行为的元启发式算法[10],该算法的基本思路可以概括为当蛇在没有食物的条件下,就会去寻找食物;当蛇处于有食物且温度较高的条件下,就向食物位置靠近即向全局最佳适应度靠近;当蛇处于温度较低且食物充足的情况下,蛇以一定的概率发生交配行为或者是战斗行为。蛇优化算法通过模拟蛇在自然界中的觅食、战斗、交配等行为,能够快速高效求解出目标函数的最优解。在无人机固定翼机动模型中,考虑到飞行高度、飞行距离和安全性的约束条件[11],其代价公式如下。
无人机飞行所经过的路径点坐标用Pij=(xij,yij,zij)表示,用Xi用来存储无人机飞行的第i 个路径列表,两个路径点之间的距离用||PijPi,j+1||表示,路径长度成本函数F1(Xi)为:
佛罗里达的迪士尼乐园里主要的云霄飞车,最高点“只有”两百尺(约十五层楼高)。云霄飞车从十五层楼高的地方俯冲下来,很恐怖吧,怎么会说“只有”呢?
建立无人机实体模型,涉及无人机自身体型参数的影响,因此,在路径规划时要考虑无人机通过障碍所造成的威胁,以此来设计安全性成本函数。在实验设计时,用圆柱体表示每一个威胁,K 为所有威胁的集合,设实验环境中总共有m 个威胁障碍。取无人机直径为D,分别设置一个以Ck 为圆心,Rk+D 为半径的碰撞区域和以Ck 为圆心,S 为半径的危险区域,如下页图4 所示。
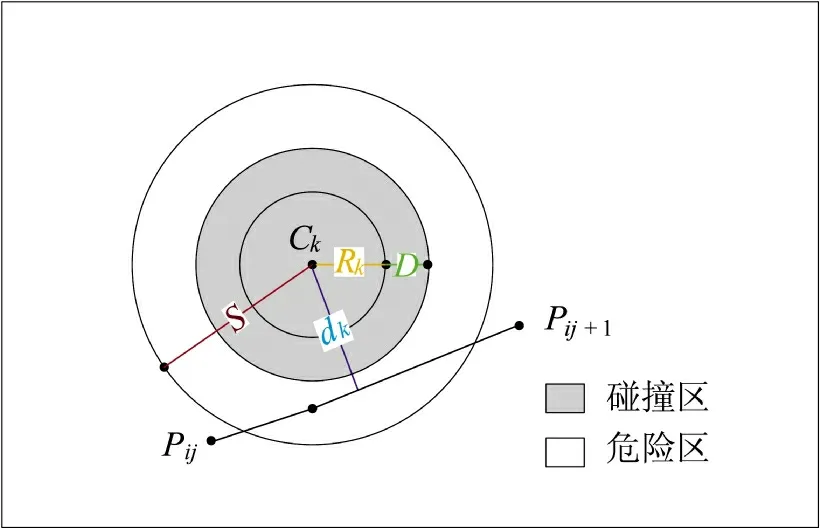
图4 威胁成本Fig.4 Threat cost
当无人机与Ck的直线距离dk小于Rk+D 时,无人机进入碰撞区域,有100%的概率发生碰撞;当无人机与Ck的直线距离dk大于Rk+D,小于S 时,无人机进入危险区域,考虑到如雷达探测信号减弱等因素的影响,有一定的概率发生碰撞;当无人机与Ck的直线距离dk大于S 时,无人机不会发生碰撞。结合无人机飞行路径段,安全性成本函数F2(Xi)为:
根据无人机最大飞行高度hmax和最小飞行高度hmin两个参数,结合路径点Pij得出高度代价公式F3(Xi)
结合无人机飞行路径约束,飞行高度约束以及安全性约束,根据上述公式可得到总成本函数为:
其中,bk为权重系数,F1(Xi)到F3(Xi)分别是路径长度,安全性以及飞行高度,Xi作为决策变量,包括n个航路点的列表Pij=(xij,yij,zij)。
为了验证蛇优化算法性能,实验运用matlab 工具并加入了粒子群算法(PSO)与基于蛇优化的三维路径规划算法进行对比验证[12]。在本次实验中,设置了9 个不同大小的圆柱体构成无人机飞行的威胁环境,设置两架无人机作为实验对象,第1 架无人机设置的起点坐标为(150,200,150),终点坐标为(800,800,150),途径路径点n 为12;第2 架无人机设置的起点坐标为(400,100,150),终点坐标为(900,550,150),实验结果如图5~图6 所示。
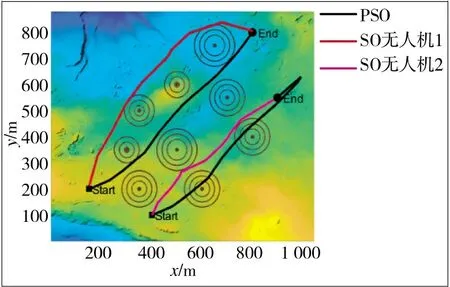
图5 SO 与PSO 算法运行结果Fig.5 Operation results of SO and PSO algorithms
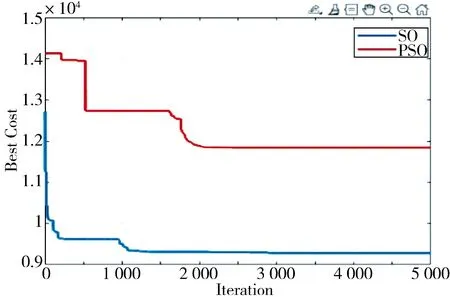
图6 最优代价变化曲线图Fig.6 Optimal cost change curve
从实验结果可以看出,PSO 算法寻找的最优路径与障碍物发生碰撞,无法找到两条成本约束下的最优路径,而SO 算法寻优能力较强,成功避开障碍,寻找到两条最优路径,因此,选取蛇优化算法应用在三维路径规划当中。
固定翼机动组件基于国产化操作系统平台,使用qt 编程工具,C++语言进行开发。实体采用沿机动路线机动的方式进行机动,实体模型以机动路径点参数为机动输入数据,记录实体所处的路段,令路段数为i,则当前实体的目标点即为给定路线的第i+1 个路径点,当路段变量达路线的路近点总数时,判定机动任务完成。
在模型开发阶段,采用GetMotionParam()的方法设置机动参数,通过CreateMotionParam()创建沿路径点列表机动参数,GetCurrentWaypoint()获取路径点机动参数的当前路径点,GetNextWaypoint()获取当前路径点之后的一个路径点,再调用GetWaypointByNumber(UINT32 Number)来根据路径点编号从路径点列表中获取路径点,任务所需机动参数获取完成,通过PrepareData()方法为仿真运行作最后数据检查;SO()方法将SO 算法进行封装,在机动组件核心方法Motion()中,用GetMotionParam()来获取实体的机动参数,进而实现SO 算法的调用;最后ProcessTopicProc(TSITopicContextPtrCtx)负责处理主题回调,实现数据交互。
组件编写完相关功能函数编译生成SO 动态链接库,并加载模型完成模型注册工作,打包后发布模型。
4 模型测试
4.1 组装测试对象
模型发布成功后,在模型装配工具中找到对应的空中组件模型进行实例化,命名该组件为_固定翼空中机动组件,并在右侧属性栏设定组件的基本属性,如图7 所示。
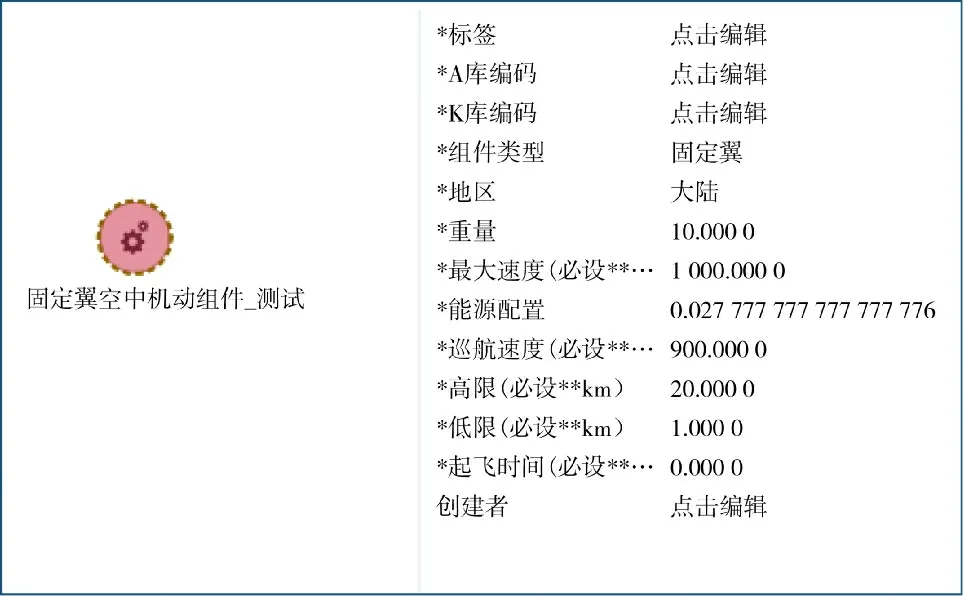
图7 空中机动组件Fig.7 Air maneuver components
根据实体模型设计将无人机实体模型,机动组件,传感器组件,通信组件组装成一架完整的无人机,装配完成的无人机模型,如图8 所示。
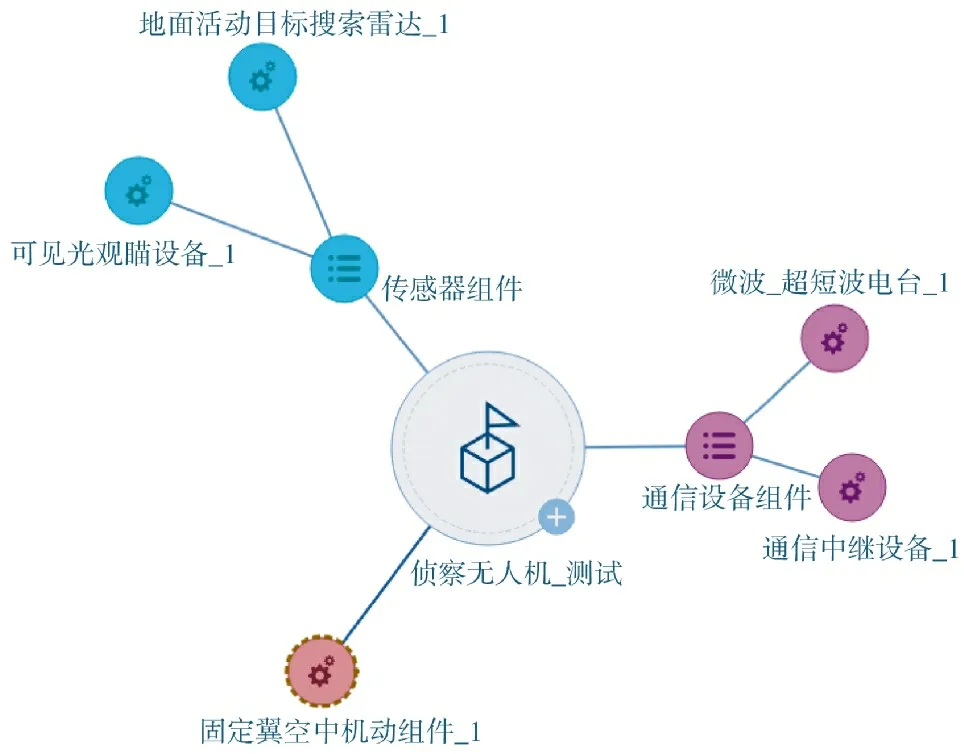
图8 无人机实体装配Fig.8 Entity assembly of UAV
4.2 建立测试想定
打开想定编辑工具,红方兵力由上述装配好的无人机实体和无人机站实体构成,设立无人机与无人机的承载关系;蓝方部署了多种兵力实体。想定部署完成,随后启动仿真引擎,控制想定开始,进行仿真推演。
在想定运行过程中,给无人机实体下达空中机动任务,指令下达界面如图9 所示。
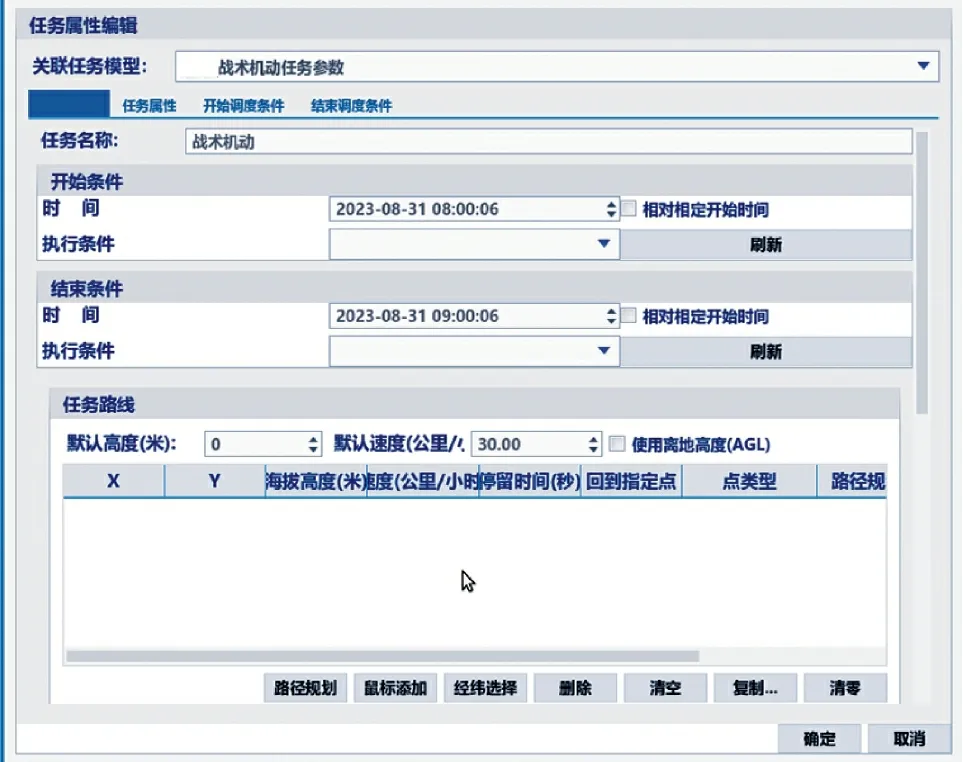
图9 指令下达界面Fig.9 Command issuing interface
无人机接收到指令开始执行行动任务,推演态势图如图10~图11 所示。
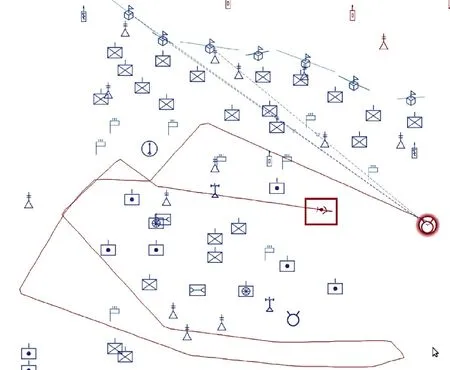
图10 态势显示界面Fig.10 Situation display interface
图11 日志输出Fig.11 Log output
从态势显示图和机动模型日志结果中可以看到,无人机在接收到机动命令后,机动组件被成功调度,无人机从无人机站飞出,态势图中红色显示曲线为无人机轨迹线,可以看到无人机按照规划的机动路径匀速机动,并最终达到终点位置,完成机动任务。
5 结论
基于Xsim5.0 仿真平台的建模机制,采用组件化建模的思想,详细介绍构建固定翼机动组件模型的过程方法,并将开发好的固定翼机动组件组装在无人机实体上完成了功能测试,结果表明,该固定翼机动模型能够逼真模拟空中的机动行为。后续将进一步开发无人机各类功能的通用性组件,减少建模工作量以满足各类无人机的功能需求。
