太阳能无人机线性自抗扰多环路能源控制
2023-06-27邵嘉琪张晓辉席涵宇刘子荣
邵嘉琪,张晓辉,席涵宇,刘子荣
北京理工大学 宇航学院,北京 100081
太阳能电动力是航空领域实现“双碳”战略的重要技术途径之一,太阳能无人机具有零排放、低噪声等特点,是电动无人机长时滞空的有效方案,也是当前国内外的研究热点[1-4]。由于太阳能本身的不连续性,通常采用锂电池作为辅助能源以满足储能和补能需求[5-7]。锂电池的引入,不可避免地带来2个问题:① 太阳能电池与锂电池2种电源如何合理地实现电力匹配;② 受锂电池电压钳位,如何让太阳能电池充分发挥最佳能效。因此,太阳能/锂电池混合系统需要高效可靠的能源管理与控制[8],以确保太阳能无人机能源系统高效稳定运行。
太阳能无人机能源系统管理的目标是提升能源系统利用效率,同时保证能源系统安全性和稳定性,为太阳能无人机高能效长航时飞行提供必要支撑。为使太阳能电池以最大可用功率输出,最大功率点跟踪(Maximum Power Point Tracking, MPPT)技术是能源管理系统的核心关键技术之一。传统最大功率点跟踪方法有扰动观测法、增量电导法和爬坡法等[9-11],近年兴起了一些智能优化的方法,如模糊逻辑控制方法、神经网络方法、以及粒子群优化方法等[12-15]。然而,以上方法仅以开环形式获得太阳能电池最大功率点的参考电压,要实现该参考电压的实际调整,还需要反馈补偿控制,从而构成最大功率点跟踪的闭环控制,其典型控制架构如图1所示[16]。传统补偿器控制方法有PID方法,它是一种基于实验抑制扰动的控制方法,在不掌握系统模型条件下,对比例、积分、微分这3个参数进行调整,就可以使被控系统获得较为满意的控制性能,但PID方法只能被动地基于误差反馈消除误差,滞后于扰动的影响,易引起超调[17-19]。因此,有学者开始研究更稳定的补偿器,Islam等[20]设计了一种双环路3p3z型补偿器,该补偿器较PID更适合跟踪参考电流和控制谐振,但该方法需要调整的参数较多,难以判定不同参数对系统性能的影响趋势,参数调节困难。Avila等[21]采用滑模控制(SMC)方法对补偿器进行控制,SMC具有较强的抗扰动能力且易于硬件实现,但SMC中出现的高频抖振易导致开关元件出现较大损耗。
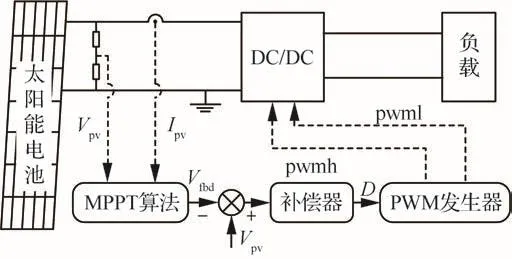
图1 典型太阳能发电控制系统拓扑[16]Fig.1 Topology of solar power generation control system[16]
此外,为了匹配锂电池的电压和电流,能源管理控制器除了进行最大功率点跟踪(MPPT模式),还要具备一定稳压和限流功能(DC/DC模式),而单个稳压或限流控制回路均无法满足对锂电池的管理需求。因此,邵阳等[22]在进行空间太阳能发电站能源管理时,采用了输出电压/电流串级双闭环控制方法对母线进行稳压和限流控制,并通过仿真验证了方法的可行性,但其对MPPT模式与DC/DC模式如何平稳切换未给出具体方案,动态条件下该方法的实际应用效果也有待进一步验证。由于最大功率点跟踪控制易受传感器采样误差及辐照动态改变等外部扰动影响,控制器会在不同工作模式之间频繁跳变。为了避免工作模式在分界点反复切换振荡,通常采用状态回滞控制方法进行区间惯性控制[23-24],然而该方法难以适应辐照扰动较大的太阳能无人机。
作为一种抗扰动能力较强的方法,线性自抗扰控制(Linear Active Disturbance Rejection Control,LADRC)能够在系统被明显扰动之前提取扰动信息,并主动消除扰动,从而降低扰动对被控量的影响[25],在控制系统的适应性和鲁棒性方面优势突出。此外,LADRC仅有4个主要控制参数,各参数之间具有一定耦合关系,实际需要调节的参数仅有一个,调参方便,适合工程应用[26],为太阳能无人机能源管理的抗扰动控制提供了一种解决思路。
本文针对太阳能/锂电池混合动力无人机能源系统的高能效控制问题,开展线性自抗扰多环路能源控制方法研究。考虑补偿控制的抗扰动性,采用LADRC方法替代传统PID方法,以提升系统的稳定性和快速响应能力。针对最大功率点跟踪、太阳能/锂电池电力匹配及锂电池管理问题,提出MPPT环路、稳压环路和限流环路联合控制方法,实现多状态量控制。针对工作模式频繁跳变问题,引入竞争机制,实现工作模式平滑切换。最后,搭建了太阳能机翼所受辐照与飞行姿态耦合的太阳能/锂电池混合能源试验平台,基于自主研发的能源管理控制器,验证了所提控制方法的可行性和有效性。
1 自抗扰控制器模型建立
1.1 等效二阶线性自抗扰控制器
太阳能电池配置的能源管理控制器采用降压型DC/DC拓扑,如图2所示,该拓扑具有2个工作状态,功率开关S在脉宽调制(PWM)信号控制下交替导通和关断。当开关S导通时,如图2(a)所示,电源的输出电流经过电感后,一部分为电容充电,另一部分为负载供电,此时电感的电动势方向为左“+”右“-”。当开关S断开时,如图2(b)所示,由于电感电流不能发生突变,电感上的感应电压方向为左“-”右“+”,以抑制其原状态的改变。续流二极管此时产生正向偏置,为电感的续流提供了返回路径,此时电感和电容同时为负载供电。降压型控制器可实现输入电压到输出电压的线性变换,通过闭环调节功率开关的占空比维持恒定的输出电压。

图2 降压型DC/DC变换器Fig.2 Topology of buck DC/DC converter
降压型拓扑从控制到输出的传递函数[27]如式(1)所示:
式中:Vi是输入电压;Vr是载波信号的幅值;R是负载电阻;C是输出电容;L是滤波电感。
以降压型拓扑作为被控对象,建立控制器模型,LADRC的控制回路如图3所示,包括线性状态误差反馈控制率(Linear State Error Feedback,LSEF)、线性扩张状态观测器(Linear Extended State Observer,LESO)和被控对象Gp(s)。
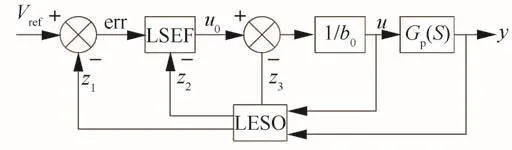
图3 LADRC控制回路Fig.3 Control structure of LADRC
被控对象的微分方程可表示为
式中:y是输出;u是控制量;b是增益,b的线性部分是b0;ω为扰动,是未知量;f是包含了外扰和内扰的总扰动。
选取状态向量x=[̇f]T,式(2)可转换为连续的扩张状态空间方程,即:
式中:
为提高系统的抗干扰性能,采用闭环控制实现状态估计,根据输出误差控制状态误差,使得估计状态和真实状态之间的误差逐步减小,对应连续线性扩张状态观测器为
式中:z→x,z是观测器的状态向量;L是观测器误差反馈增益矩阵。由于̇可通过校正项可以估计出来,因而式(3)忽略求得L为
式中:ωo是状态观测器的带宽。
由于,z1→y,z2→̇,z3→f,那么由图3可得:
联立式(2)和式(6)可得:
二阶LADRC本质上是双积分器构成的串联系统,采用全阶LESO的LSEF控制器形式为
式中:r是给定值;z1和z2取自LESO的观测器状态;kp0、kd分别为比例与微分的放大系数。
因此可使得闭环传递函数成为一个无零点的二阶系统,即:
经过参数化[27],取kp0=ωc2,kd=2ωc,ωc是控制器的带宽。因此,LSEF控制器只与唯一参数带宽相联系,简化了控制器设计。
1.2 LADRC离散化与参数设计
为了实现LADRC的数字化控制,需要将LESO离散化,采用欧拉法,即:
将式(10)代入式(3),有
式中:
为离散时间。
构造离散扩张状态观测器方程如下:
式中:Lc为离散扩张状态观测器的增益矩阵。离散观测器极点与连续观测器极点之间满足:
b0由模型进行估计,由式(1)可得:
由式(2)和式(18)可得:
从图3可知,LSEO可由式(12)实现,存在β、h、b0这3个参数,β可由式(17)计算,b0可由式(19)计算,h是离散时间。LSEF可由式(9)实现,仅存在未知量ωc,对于大部分工程对象,ωo约为ωc的3~5倍[28],故需要调节的参数只有控制器的带宽ωc。
2 基于LADRC的多环路控制方法
太阳能无人机能源管理系统设计目标是既要实现太阳能电池高效发电,又要满足锂电池健康管理需求,为此本文设计了一种基于LADRC的多环路控制方法,其控制架构如图4所示。该方法包括3个控制环路,即MPPT环路、稳压环路和限流环路。MPPT环路用于实现太阳能电池的最大功率点跟踪;稳压环路实现输出电压的恒压控制,防止无人机轻载时锂电池过度充电;限流环路实现输出电流的恒流控制,防止控制器过载及锂电池充电倍率过大,3个环路可根据当前系统状态协同工作。本文所采用的MPPT算法是增量电导法(Incremental Conductivity,INC),INC算法复杂度低、精度较高、稳定性好,是当前工程化常用方法[29]。

图4 多环路控制结构Fig.4 Multi-loop control structure
2.1 多环路及运行机制
本文所提多环路控制方法如图4所示,具体描述如下:
1) 在MPPT环路中,INC算法根据太阳能电池的电压和电流给出光伏阵列目标工作点的电压Vpv_fbd,作为该环路的参考量。Vpv和Vpv_fbd的误差信号err1作为环路补偿器Gv1(s)的输入,产生MPPT环路控制量u1。
2) 在稳压环路中,参考电压Vref与反馈环节Hv(s)产生的误差信号err2输入补偿器Gv2(s)后,产生稳压环路控制量u2。
3)u1、u2经比较函数minf(u1,u2)得输入量的最小值u,经限幅后产生电流环参考信号Iref。在限流电路中,参考电流Iref与输出电流的反馈环节Hc(s)产生误差信号err3,输入电流环补偿器Gc(s)后,产生占空比D,经限幅后的PWM信号作用于控制对象。
多环路运行机制如下:
1) 上电启动及空载时,Vpv_fbd的初值取为0.98Vpv,MPPT环路的误差err1为正值,控制信号u1将正向饱和,稳压环路取得控制权限,控制器工作在DC/DC模式。
2) 小于光伏最大功率加载时,环路运行机制将保持上一个状态,仍然处于DC/DC模式。
3) 大于等于光伏最大功率加载时,输出电压被拉低,误差变大,u2饱和,MPPT环路取得控制权限,控制器工作在MPPT模式。
4) 只要MPPT环路有一次竞争优势,输出电压和电流将发生明显变化,使得u2上限饱和,Vpv_fbd与Vpv几乎完全一致,MPPT环路依然具备竞争优势。当输出电流达到上限值Imax时,整个环路将变为单个电流环路,控制器为恒流输出模式。
多环路控制方法实现既定目标的前提是电压电流采样频率、INC调用频率、各补偿器调用频率的合理匹配,本文设计采样频率为50 kHz;电流环作为整个环路的内环,运行频率设计为20 kHz;MPPT环路和稳压环路作为外环,运行频率设计为10 kHz。
2.2 单环路动态响应测试
为了测试LADRC方法和PI方法在不同工作模式下的控制效果,分别对LADRC方法和PI方法的单环路进行动态响应测试,所获得的测试结果和控制参数可为多环路测试方案设计和调参提供参考。
MPPT环路测试时,控制器实现最大功率点跟踪。测试工况如表1所示,表中Voc为太阳能电池开路电压;Isc为短路电流;Vm为最大功率点电压;Im为最大功率点电流。按照LADRC控制器的参数整定方案,确定ωo=5ωc,由式(19)可确定b0=0.8×1010/3.3;ωc为唯一需要调整的参数,经调试选取最优的ωc=1.5×103。稳压环路测试时,控制器工作在DC/DC模式,实现稳压,测试工况如表1所示,经调试选取最优的ωc=1.5×103。

表1 动态响应测试工况参数Table 1 Parameters of dynamic response test
采用表2所示的控制参数,对不同方法控制的单环路进行动态响应测试,结果如图5所示。其中,单个MPPT环路测试结果如图5(a)所示,LADRC方法和PI方法控制的最大功率点跟踪时间分别为1.6 s和2.8 s, 相比PI方法,LADRC方法使最大功率点跟踪速度提升了约43%。在上电的瞬间,PI方法控制的输出电压略有震荡,且响应速度较慢,而LADRC方法控制的输出电压无震荡,且响应速度较快。单个稳压环路测试结果如图5(b)所示,LADRC方法和PI方法的动态响应效果无明显差别。
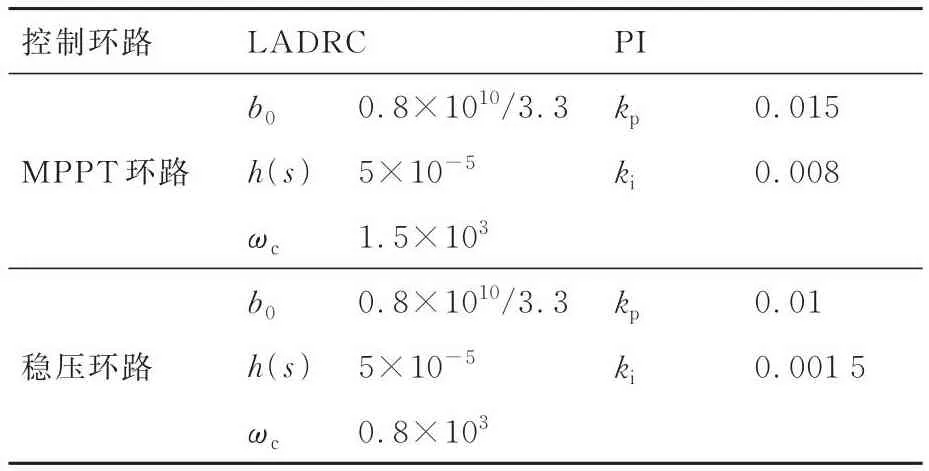
表2 单控制环路参数Table 2 Parameters of single-control loop
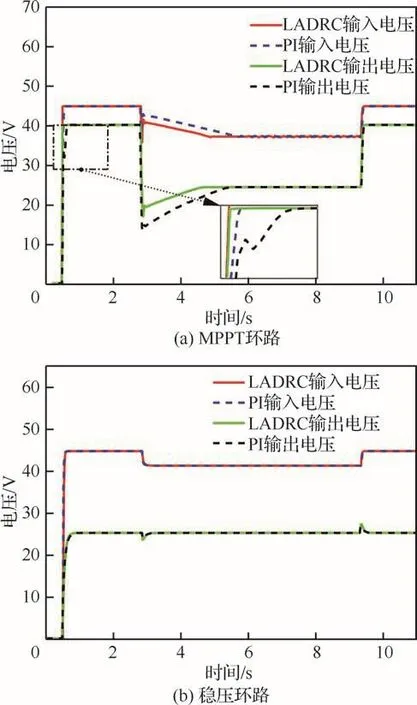
图5 单环路动态响应测试Fig.5 Dynamic response test of single-control loop
2.3 多环路动态响应测试
在太阳能无人机实际飞行中,能源管理控制器既要实现最大功率点跟踪,又要实现稳压功能以匹配储能锂电池,避免其过度充电。因此,要同时运行MPPT环路和稳压环路,为了测试所提LADRC多环路控制方法的有效性,以及相对于PI方法的优势,本节对不同方法的多环路进行动态响应测试。
由单环路测试结果可知,LADRC方法在最大功率点跟踪时有显著优势,输出稳压控制效果与PI方法无明显差异,因此设计2种控制方案,方案1用LADRC方法控制MPPT环路,用 PI方法控制稳压环路;方案2MPPT环路和稳压环路均用PI方法控制。对两种方案进行对比测试,同样采用表1所示测试工况。
控制器的工作模式标志通过CAN通信传输到上位机,工作模式为1时,控制器工作在DC/DC模式,工作模式为2时,控制器工作在MPPT模式。加载时,控制器输出电压低于参考电压,控制器进行最大功率点跟踪,在降载瞬间,输出电压高于参考电压,控制器执行降压功能,将输出电压稳定在参考电压。采用表3的控制参数,对两种控制方案进行测试,所得测试结果如图6所示。
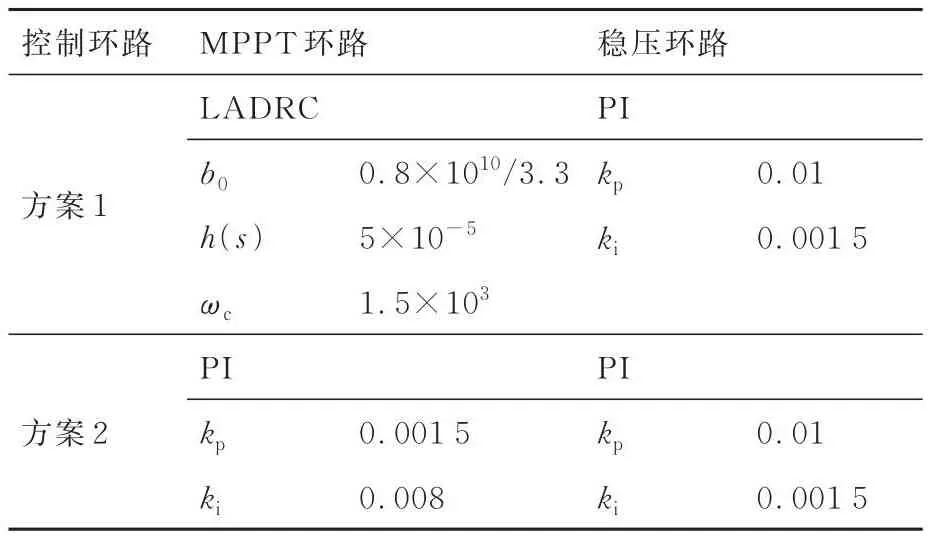
表3 双控制环路参数Table 3 Parameters of dual-control loop

图6 双环路动态响应测试Fig.6 Dynamic response test of dual-control loop
如图6(a)所示,方案1和方案2的最大功率点跟踪时间分别为0.5 s和1.7 s, 相比方案2,方案1的最大功率点跟踪速度提升了70%。由此可见LADRC方法明显地提升了MPPT环路的最大功率点跟踪效果。如图6(b)所示,在加载瞬间,方案2的输出电压超调量较大,而方案1的输出电压波动幅度明显减小。在降载瞬间,2种方案均出现较大的超调量,因此在下文中引入限流环路进行改善。
引入限流环路后,对于不同控制方法的三环路进行测试。同样设计2种控制方案,方案1用LADRC方法控制MPPT环路,用PI方法控制稳压环路和限流环路;方案2中MPPT环路,稳压环路和限流环路均采用PI方法。
由于系统的传递函数改变,重新计算b0=0.006×1010/3.3,经调试LADRC控制参数选取最优的ωc=1.35×103,稳压环路采用PI方法,主要控制参数如表4所示,测试结果如图7所示。
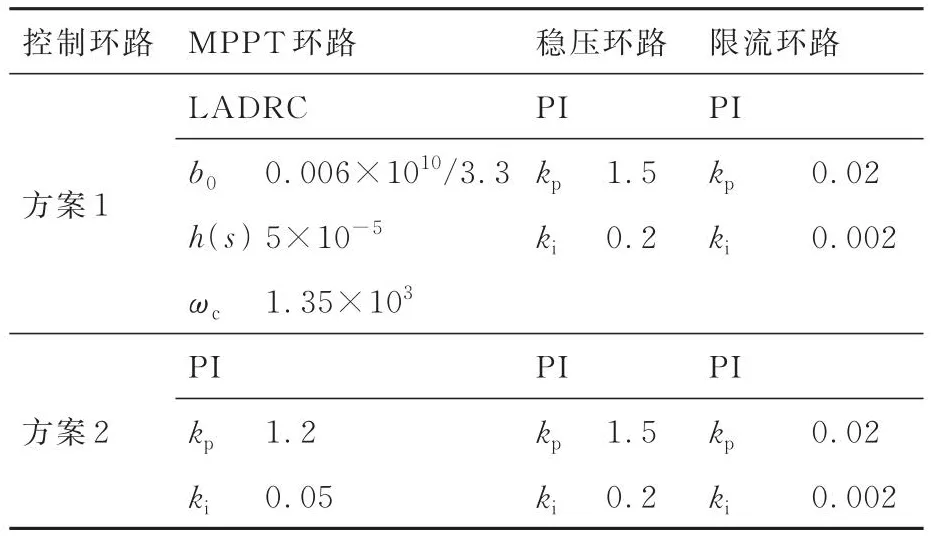
表4 三控制环路参数Table 4 Parameters of three-control loop
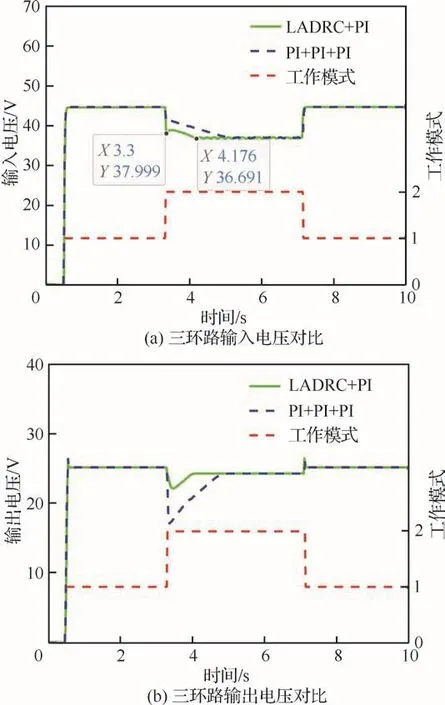
图7 三环路动态响应测试Fig.7 Dynamic response test of three-control loop
由图7(a)可见,方案1和方案2的最大功率点跟踪时间分别为0.7 s和1.9 s,相比方案2,方案1的最大功率点跟踪速度提升了60%,最大功率点跟踪能力依旧较强。由图7(b)可见,在加载瞬间,方案1输出电压的超调量远小于方案2,在降载瞬间,方案1输出电压的超调量远小于双环路。因此,限流环路的引入不仅可以对输出的电流进行限制,防止充放电倍率过大对锂电池造成损伤,从动态响应测试结果来看,还能够改善控制器动态响应特性,提高控制系统的稳定性和鲁棒性,保证快速的最大功率点跟踪。
3 太阳能无人机八边形航线飞行模拟试验
为了验证所提LADRC多环路控制方法在飞行过程中的适应性、稳定性和有效性,本文搭建了太阳能/锂电池混合能源试验平台模拟太阳能无人机八边形航线飞行过程的动态辐照和载荷变化,开展能源管理控制效果试验。
本文设计了如图8所示的试验平台方案,基于该方案搭建了如图9所示的试验平台,主要包括:太阳能模拟器,锂电池,能源管理控制器、数据采集器(STM32)、动态载荷模拟器、电流传感器以及上位机等。基于对华东电子测量仪器研究所的DC176301型号太阳能电池阵列模拟器进行二次开发,将太阳能无人姿态变化导致的机翼所受辐照变化引入到光伏发电控制之中,上位机2与模拟器采用TCP/IP通信协议进行通信,动态在线设定不同飞行方位机翼所受辐照度对应的太阳能电池工程参数,实现八边形航线中8个方向上的太阳能机翼发电状态模拟。锂电池采用ACE Lipo电池,满电电压为25.2 V。能源管理控制器为实验室自主研制的200 W级控制器,其性能参数如表5所示。数据采集采用STM32F7 67控制器,用于记录电流电压数据以及能源管理控制器的工作状态,并传输到上位机2。动态载荷模拟器采用中鹰可编程电子负载ZY8715,通过上位机1模拟飞行过程载荷需求,将电力载荷信息发送至电子负载,生成实际电力载荷。光伏模拟器通过能源管理控制器与锂电池并联为负载提供能量,能源管理控制器采用LADRC方法控制MPPT环路,PI方法控制稳压环路和限流环路。

表5 能源管理控制器性能参数Table 5 Parameters of energy management controller

图8 试验平台框图Fig.8 Block diagram of test platform
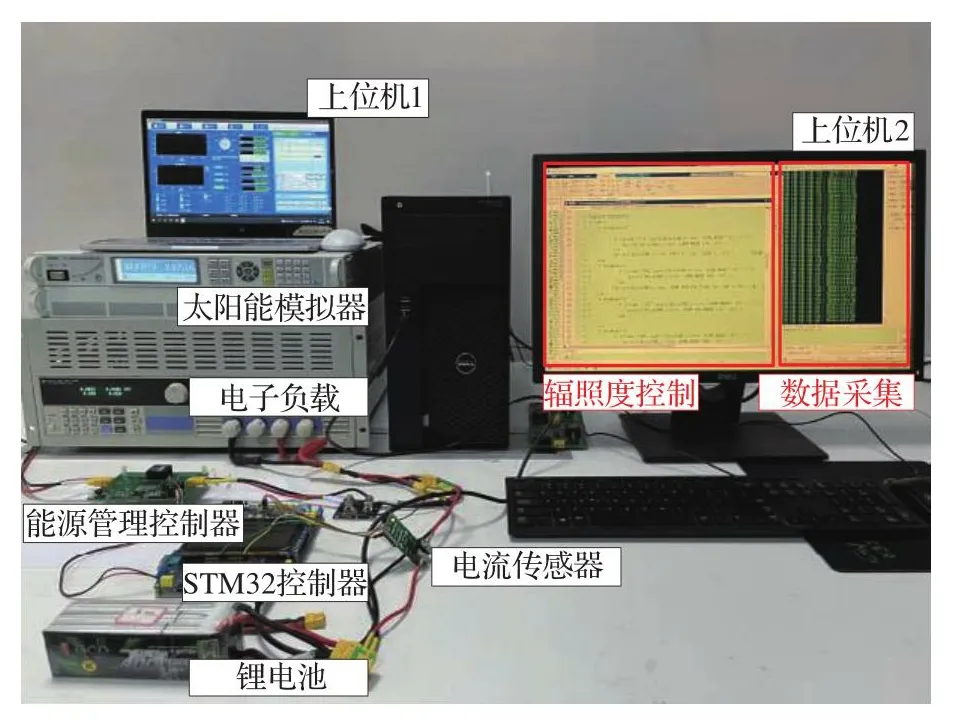
图9 太阳能/锂电池混合能源试验平台Fig.9 Solar cell/lithium battery hybrid energy test platform
本文设计了一种太阳能无人机典型任务剖面,如图10所示,主要包括:爬升、巡航及下降阶段,其中巡航段为等边八边形航线,以体现不同航向姿态下的辐照变化。整个飞行剖面分为10个状态,其中0状态表示爬升阶段,俯仰角为15°,1~8状态分别对应平飞阶段八边形航线的不同方位,俯仰角为5°,平飞高度为500 m,9状态表示无动力滑翔下降阶段,假定此时俯仰角不发生变化。
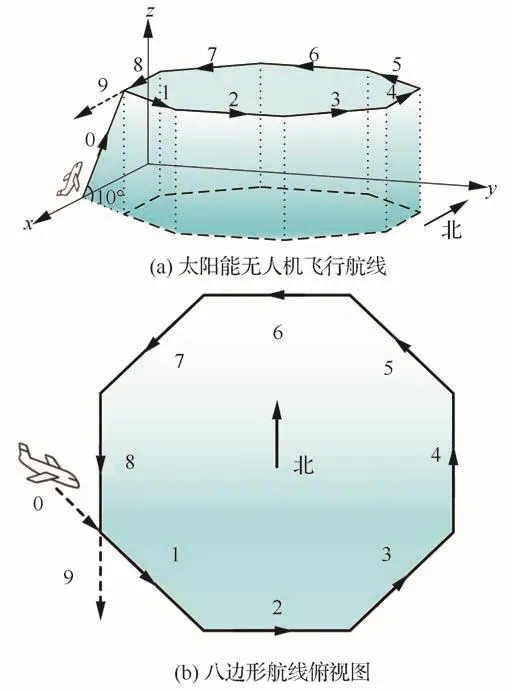
图10 太阳能无人机八边形飞行航线方案Fig.10 Flight route scheme of solar-powered UAV
上位机通过设定机翼所受辐照对应的太阳能电池的工程参数来控制太阳能模拟器,任意辐照和环境温度下太阳能电池4个工程参数可由式(20)~式(23)计算得到[30]。
式中:补偿系数取典型推荐值a=0.002 5(℃)-1,m=0.000 5(W/m2)-1,c=0.002 88(℃)-1,参考辐照强度取Sref=1 000 W/m2,参考温度Tref=25 ℃,标准工况下光伏系统4个工程参数Isc、Im、Voc、Vm取值见表1。
参考北京纬度39.9°,选取一年中第172天上午10:00的日照情况,计算出无人机在不同方位的辐照度,如表6所示,表中Pm为不同辐照度下太阳能机翼的理论最大功率,即Im′与Vm′的乘积;Pmout为能源管理控制器最大功率点跟踪后的实际输出功率,跟踪效率为Pmout与Pm的比值。
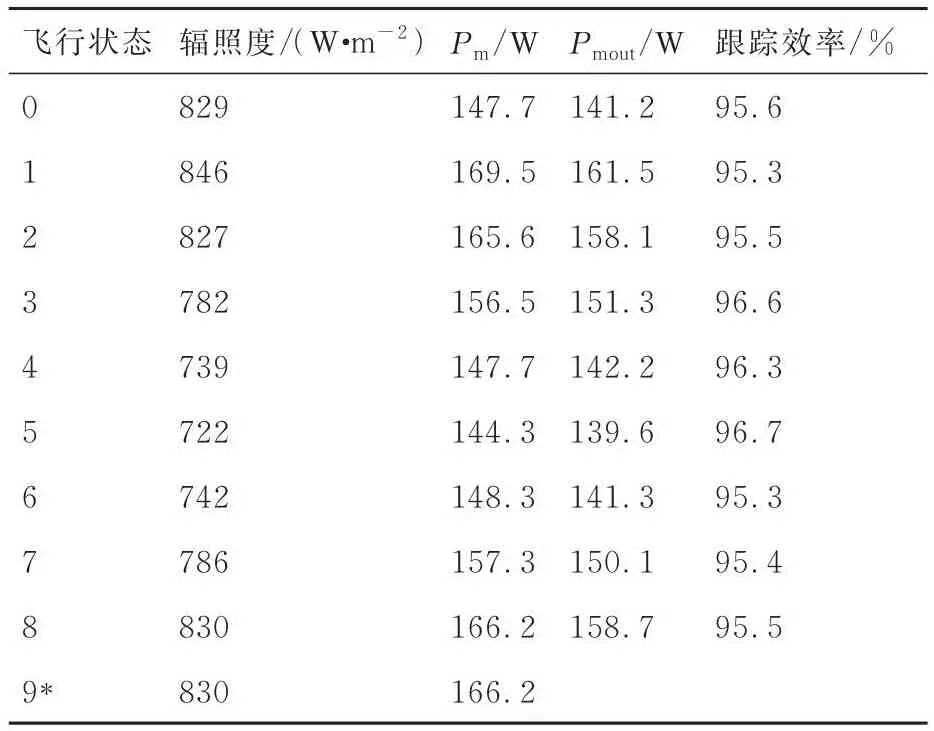
表6 不同飞行状态辐照度及功率Table 6 Irradiance and power in different flight states
飞行过程的需求功率剖面如图11所示,每个飞行阶段的描述如下:①爬升阶段:需求功率最大为557 W,光照充足;②巡航阶段:飞行航线为正八边形,平飞时需求功率为100 W,飞行方向改变需求功率增大为150 W;③降落阶段:此时需求功率为0 W,无人机势能转化为动能,进行无动力滑翔。
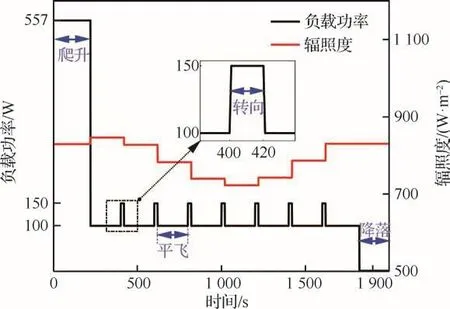
图11 负载功率剖面Fig.11 Power profile of load
太阳能无人机八边形航线飞行模拟试验结果如图12~图14所示。其中,图12为飞行过程太阳能/锂电池混合功率分配曲线,在大功率爬升阶段,太阳能电池通过能源管理控制器以最大功率144.3 W输出,锂电池补充剩余需求功率;在小功率巡航阶段,太阳能电池提供主要能量,平飞时负载功率小于Pmout,太阳能电池剩余功率为锂电池充电。转向时负载功率增大,当Pmout<150 W时,锂电池为补充负载需求,会有短暂放电,巡航阶段结束后锂电池电压接近满电截止电压25.2 V,几乎充满。在降落阶段,飞行需求功率降为0 W,太阳能电池可用充电功率进一步增大,而为了防止锂电池过充,能源管理控制器通过预设模式竞争机制,及时将工作模式调整为DC/DC稳压模式,将输出电压稳定在锂电池满电截止电压。整个工况优先使用太阳能电池,锂电池起到能量补充和应对短时大功率波动的作用,实现了两种电源优势互补和能量高效利用的目标。
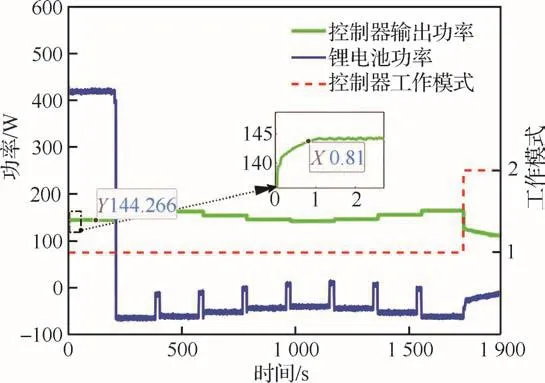
图12 控制器及锂电池功率Fig.12 Power of controller and lithium battery
图13为锂电池在整个过程中的电压变化曲线,起飞时锂电池初始电压为25.2 V,处于满电状态,爬升阶段锂电池大功率输出后电压降到22.8 V,在巡航阶段锂电池充电完成,电压回到25.2 V。当负载功率为0 W时,锂电池接近满电,达到输出限制电压,能源管理控制器切换至DC/DC模式,以锂电池的满电截止电压输出,防止锂电池过充。
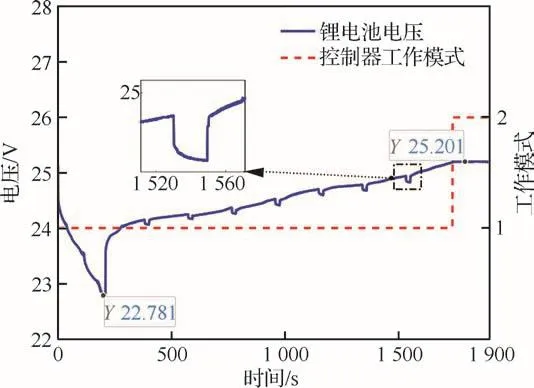
图13 锂电池电压Fig.13 Voltage of lithium battery
图14为整个过程中的电流曲线,也可以看出锂电池的充放电情况,放电时电流为正,充电时电流为负,当锂电池充满后电流逐渐减小到0 A,从而有效地避免了锂电池过充。
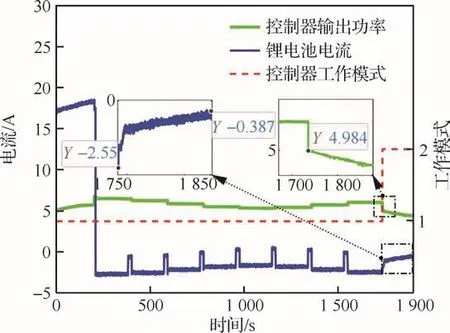
图14 控制器及锂电池电流Fig.14 Current of controller and lithium battery
整个动态飞行模拟过程中,跟踪最大功率点的时间为0.8 s,控制器最大功率点跟踪效率超过95%,控制器能迅速响应辐照度变化,能源管理过程无明显震荡,控制器工作模式切换平滑,由此可见,所提出的控制方法有效且实用。
4 结 论
本文提出了一种基于LADRC方法的太阳能无人机多环路能源控制方法,并开展了理论和实验研究,所得结论如下:
1) 与传统PI方法相比,LADRC方法调节参数只有一个,简化了控制器的调试过程,与传统PI方法相比,采用LADRC方法的控制器瞬态响应超调量较小且响应迅速。
2) 在引入LADRC方法控制MPPT环路后,单环路、双环路和三环路控制的最大功率点跟踪速度分别提升了43%、70%和60%。另外,三环路控制中,增加限流环路可明显提升控制器的鲁棒性和稳定性。
3) 在飞行模拟测试过程中,能源管理控制器采用三环路控制,其中,MPPT环路采用LADRC方法,在所设计的飞行功率剖面下,太阳能始终以最佳能效输出,锂电池可进行合理充电并动态补偿需求功率,实现了太阳能/锂电池混合能源的高效利用,保证了整个能源系统的稳定性和安全性。试验过程中,能源管理控制器动态响应效果良好,最大功率点跟踪效率达95%以上,并且能够根据飞行载荷和电池电量状态平滑切换工作模式。
