一种频域脉冲最小均方误差杂波对消算法
2023-06-26沈显照杨鹏程
沈显照,杨鹏程
(中国电子科技集团公司第三十八研究所,安徽合肥 230088)
0 引 言
随着无人机的广泛应用,商业级无人机由于造价低廉,且能携带爆炸物、危险物、高分辨率摄像头等,对军港、机场、核电站等要地的安全带来严峻挑战[1-3]。面对日益严峻的无人机威胁,反无人机技术及系统逐步成为研究和发展热点[4-8]。在反无人机系统中,雷达作为核心传感器,具有作用距离远、覆盖范围大、全天时全天候工作等优点。无人机飞行高度低、速度慢、RCS小,是一种典型的“低慢小”目标。由于目标高度低,雷达波束下视,地物回波从波束主瓣进入,杂波很强,而目标RCS小,目标回波微弱,所以雷达探测“低慢小”目标,将面临强杂波环境中的弱目标检测问题[9]。
为实现弱目标探测,脉冲多普勒(PD)雷达一般通过脉冲压缩和FFT 处理来提高目标信噪比,并且在多普勒维实现目标和杂波分离。同时,为了压低距离维和多普勒维副瓣,在脉冲压缩和FFT处理时需进行适当的加权[10]。加权将会导致杂波在多普勒维的主瓣展宽,使杂波能量泄漏到邻近的几个多普勒通道,从而淹没慢速弱目标。为避免杂波多普勒维主瓣的影响,可对杂波进行对消,将其从回波信号中消除。传统脉冲体制雷达一般通过动目标显示(MTI)[11]技术来对消杂波,但是MTI 在多普勒维的凹口较宽,在对消杂波的同时,对慢速目标也有较大的衰减,从而降低了系统对慢速目标的检测能力。
最小均方(Least-Mean-Square,LMS)类算法[12]以其实现简单、性能稳定成为自适应信号处理中的一种重要算法,已广泛应用于外辐射源雷达(连续波体制)杂波对消领域[13-14],具有计算复杂度低、多普勒维凹口窄的特点。该类算法通过自适应估计分布在各距离单元上的杂波复幅度,然后重构杂波、将其从回波中减去,实现杂波对消。但LMS算法采用逐点更新权向量,只适用于连续波雷达,不能直接用于PD 雷达。因为连续波雷达回波的各个采样点均包含所有距离单元的杂波,滤波器权值在各采样点之间保持不变,而脉冲体制雷达发射脉冲很窄,每个采样点仅包含部分距离单元的杂波,滤波器权值在采样点之间将发生剧烈变化,所以直接采用LMS 算法,滤波器将难以收敛,无法有效对消杂波。
针对脉冲体制雷达杂波对消,本文对LMS 算法进行了改进,提出了频域脉冲LMS(Frequencydomain Pulse LMS,FPLMS)算法。一、逐脉冲更新权向量。由于每个接收脉冲均包含了所有距离单元的杂波,滤波器权值在脉冲间保持不变,所以FPLMS 算法采用逐脉冲更新权向量。二、频域实现。将算法中的矩阵乘法运算转化为相关运算,通过频域FFT 实现,降低了算法的计算量。仿真结果表明,FPLMS 算法能够有效对消杂波,消除杂波主瓣对目标检测的影响,适用于“低慢小”探测雷达的杂波对消。
1 信号模型
假设“低慢小”探测雷达为脉冲体制,发射线性调频信号,其复数形式为
式中,t为时间变量,T为脉冲宽度,κ为调频率,rect(t)为矩形函数,定义为
对发射信号进行离散采样有
式中,Ts为采样率,N为发射脉冲采样点数,NTs=T。
雷达接收的回波信号包括杂波、目标回波和噪声。第k个发射脉冲的回波信号离散采样后的复数形式为
式中:sclt(n,k),stgt(n,k),nech(n,k)分别表示第k个发射脉冲对应的杂波、目标回波、噪声;acl表示第l个距离单元的杂波复幅度;ati,li,fdi分别为第i个目标的复幅度、距离单元、多普勒频率;fr为重频。
由式(4)可以看出,杂波信号可表示为发射信号时延副本的线性组合。若能估计出各个距离单元上杂波的复幅度,则可重构出杂波信号,将其从回波信号中滤除。
2 基于FPLMS算法的杂波对消
2.1 LMS算法存在的问题
LMS 算法可以自适应估计杂波的复幅度,实现杂波对消。但是,对于脉冲体制雷达,由于发射信号为脉冲形式,杂波在不同采样点的分量不同,滤波器系数也在采样点间变化。
例如,杂波在n0采样点值为
采用LMS 算法进行杂波幅度估计,滤波器系数应为ac,n0-N2+1…ac,n0+N2。
而杂波在n0+1采样点的值为
滤波器系数应为ac,n0-N2+2…ac,n0+N2+1,与n0采样点的滤波器系数不同。
由于滤波器系数一直变化、难以收敛,所以LMS算法无法有效对消脉冲体制雷达杂波。
2.2 PLMS算法原理
从另一角度来看,杂波在脉冲间的组成分量相同,均为所有距离单元的杂波的线性组合。例如,第k个脉冲的杂波信号矢量为
式中,sl=为发射脉冲矢量时延l个距离单元后的信号,sclt(k)=
滤波器系数为ac0,ac1…ac,Nr-N+1,与脉冲编号k无关,在脉冲间保持不变。
所以,针对脉冲体制雷达的特点,本文对LMS算法进行了改进,提出了脉冲LMS(PLMS)算法,在脉冲间进行权向量更新,来对消杂波。
PLMS算法的原理框图如图1所示。

图1 PLMS算法原理框图
发射信号及其时延副本构成了输入矩阵S:
式中Nr为回波信号的采样点数,L为滤波器阶数。
对于第k个脉冲,将矩阵S与滤波器权向量w(k)相乘,得到杂波信号的估计,然后将其从期待响应(回波信号)中减去,得到k个脉冲的对消输出信号,也称作估计误差,表示为
式中,sech(k)=为第k个脉冲的回波信号,w(k)=[w0(k)w1(k)…wL-1(k)]T,wl(k)表示滤波器对第l个距离单元杂波复幅度的估计。
根据LMS算法原理,权向量的更新公式为
式中,μ为滤波器步长为梯度估计。
将式(11)代入式(10),权向量的更新公式变为
以上为PLMS 算法的推导过程,现将其总结如表1所示。
表1 PLMS算法总结
2.3 FPLMS算法
PLMS 算法直接实现,计算量较大,主要的计算量在Sw(k)和SHsout(k),而这两项均可看成是信号的相关处理,可以利用快速傅里叶变换在频域实现,因此本文进一步提出了频域脉冲LMS(FPLMS)算法。
式中,⊛表示圆周卷积,★表示圆周卷积得到的无效值。取sB⊛w(k)得后个值得到Sw(k),利用式(9)即可计算出对消输出信号sout(k)。
取式(14)前L个值得到SHsout(k),利用式(12)即可实现权向量的更新。
根据以上分析,FPLMS算法流程如图2所示。

图2 FPLMS算法流程图
3 仿真试验
3.1 仿真参数
本文通过仿真实验来验证算法性能。雷达发射线性调频信号,系统参数如表2所示。根据系统参数,进行回波信号仿真。回波信号包括杂波、噪声和目标回波信号。杂波由静止地物反射产生,分布在整个探测距离内,幅度随距离而衰减(由雷达方程确定),杂噪比设为40 dB。为分析系统对慢速目标的探测能力,目标速度设为1 m/s,具体参数如表3所示。

表2 系统参数

表3 目标参数
仿真得到的回波信号如图3所示,其中不同的颜色表示不同发射脉冲的回波信号。
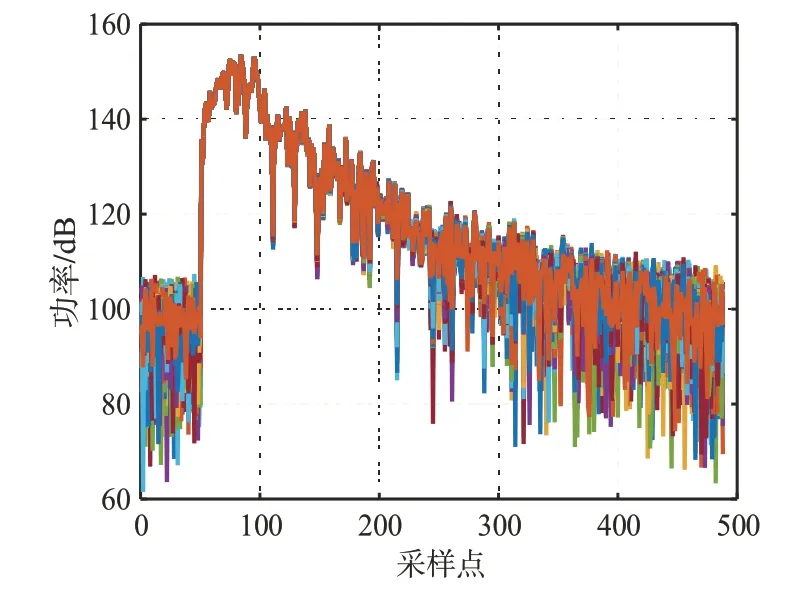
图3 回波信号时域波形
对回波信号进行脉冲压缩和FFT 处理。为抑制距离维和多普勒维旁瓣,脉冲压缩采用40 dB 的泰勒权,FFT 采用70 dB 的泰勒权,处理结果如图4所示。可以看出,由于杂波主瓣展宽,速度小于5 m/s的目标都将淹没在杂波中,无法检测。

图4 回波信号处理结果
若要检测目标,需要对杂波进行对消,进而消除杂波主瓣。理想的对消结果是将杂波完全对消,只保留噪声和目标回波。对理想对消结果进行脉冲压缩和FFT 处理,结果如图5所示。处理之后,目标的峰值为165.2 dB,噪声基底为139.7 dB,目标信噪比为25.5 dB。后续对消算法将与理想对消结果进行比较,来评价其性能。

图5 理想对消输出信号处理结果
3.2 杂波对消
1)MTI对消
对回波信号采用三脉冲MTI 对消,对消结果如图6所示。可以看出,MTI 对消在零速附近形成了很深的凹口,杂波得到了充分的抑制。但是由于凹口较宽,慢速目标也被对消了。所以,MTI 对消不适合慢速目标探测场景。


图6 MTI对消输出信号处理结果
2)FPLMS对消
对回波信号采用FPLMS 算法进行对消。FPLMS 算法的滤波器阶数设为500(与信号长度相同)。步长对FPLMS 算法的性能影响较大。步长越小,滤波器凹口越窄,对慢速目标的衰减越小,目标探测性能越好。但是,步长太小,滤波器系数难以收敛,杂波剩余较大,影响目标探测。所以,为保证杂波充分对消,且对目标衰减较小,本文采用3 次重复对消、先大步长后小步长的对消策略。第一次采用大步长对消,步长取5×10-3,滤波器系数初始值设为零,通过对消得到收敛的滤波器系数;第二次对消,步长取5×10-4,以第一次对消得到的滤波器系数为初始值;第三次对消,步长取5×10-5,以第二次对消得到的滤波器系数为初始值。
FPLMS算法的对消输出结果如图7所示。可以看出,相比回波信号,对消输出信号功率大幅衰减,与理想对消输出相近,说明杂波得到了有效的对消。
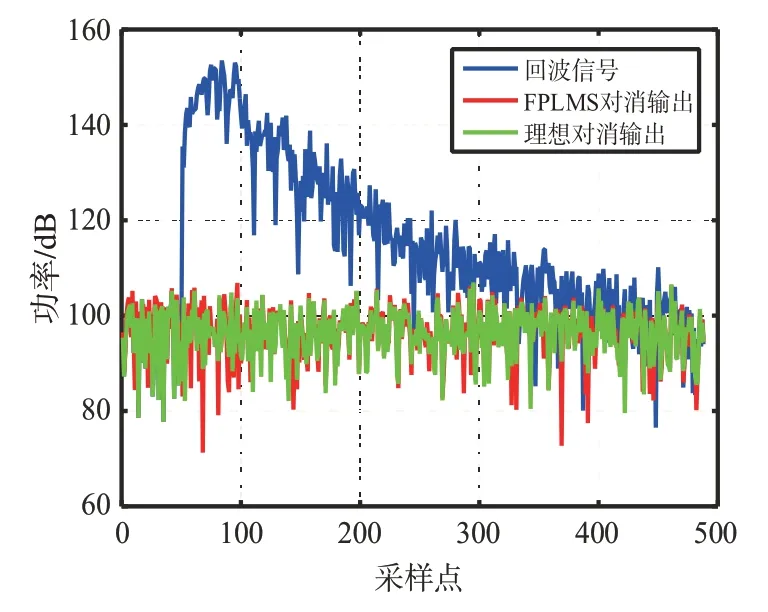
图7 FPLMS对消输出结果
对对消输出信号进行脉冲压缩和FFT 处理,结果如图8所示。可以看出,对消之后杂波谱消失,而目标清晰可见。其中,目标的峰值为164.6 dB,噪声基底为139.8 dB,目标信噪比为24.8 dB。与理想对消相比,目标信噪比仅损失0.7 dB。

图8 FPLMS对消输出信号处理结果
以上结果说明:FPLMS 算法能够对杂波进行有效对消,消除杂波主瓣展宽对目标检测的影响,且对慢速目标的对消损失较小。
3.3 滤波器凹口
不论是MTI 对消,还是FPLMS 对消,均可以看成是一种滤波器,对不同速度的目标有不同的信噪比损失。为评价FPLMS 滤波器的性能,对3.1节中仿真的回波,将其目标速度从-10 m/s 到10 m/s,以0.5 m/s 为间隔进行遍历,然后利用FPLMS 算法进行对消,经过脉冲压缩和FFT 处理之后,与理想对消输出信号进行对比。目标信噪比损失随速度的变化曲线如图9蓝线所示。作为对比,对同样的数据也采用MTI 进行对消,并计算目标信噪比损失,见图9红线。

图9 FPLMS滤波器凹口
由图9可以看出,FPLMS滤波器的3 dB宽度约为1.2 m/s(0.6倍速度分辨率,速度分辨率为2 m/s),目标速度在2 m/s(1 倍速度分辨率)时信噪比损失已接近于0;而MTI 滤波器的3 dB 宽度约为3.5 m/s(1.7 倍速度分辨率),目标速度在10 m/s(5 倍速度分辨率)时信噪比损失才接近于0。FPLMS 滤波器的凹口宽度约为MTI 的1/3,且对高于1 倍速度分辨率的目标SNR损失接近于0。
以上结果表明:FPLMS 算法具有很窄的滤波器凹口,在充分对消杂波的前提下,对慢速目标的影响很小,适用于“低慢小”探测雷达的杂波对消。
4 结束语
本文针对“低慢小”探测雷达杂波多普勒维主瓣淹没慢速弱目标问题,提出了FPLMS 算法。该算法能够有效对消杂波,且具有滤波器凹口窄、对目标影响小的优点,提高了强杂波环境下“低慢小”探测雷达的慢速弱目标探测能力。本文算法也可用于其他脉冲体制雷达的杂波对消。
FPLMS 算法在模型上假设杂波信号是发射信号的线性组合,通过重构杂波来实现对消。因此,在使用时需要已知真实的发射信号。若采用理论发射信号,则由于相关性的降低,难以达到预期的对消性能。所以,采用FPLMS 算法进行杂波对消时,系统需要预留一路发射信号采集通道。
