加装传统AEB后的未避免事故典型碰撞场景与事故特征 *
2023-06-25邹铁方刘前程
邹铁方,刘前程,魏 亮
(1. 长沙理工大学汽车与机械工程学院,长沙 410114; 2. 云南云通司法鉴定中心,昆明 650255)
前言
据世界卫生组织(world health organization,WHO)统计,全球每年因道路交通事故死亡人数约为135 万,其中行人死亡人数占比在22%左右[1]。而国家统计局数据显示,2014—2019 年我国交通事故总死亡人数达369467,其中行人死亡人数占比为25%左右[2],表明我国行人交通安全亟需关注。
自动紧急制动系统(automatic emergency braking, AEB)被视为有效降低行人事故伤害的主动安全系统。美国公路安全保险协会指出,AEB 可以减少27%的交通事故[3]。因此,AEB 受到各国政府和研究人员的重视,欧盟新车评价规程(Euronew car assessment program, Euro-NCAP)、中国新车评价规程(China new car assessment program, CNCAP)均将AEB测试纳入规程[4-5]。Anderson等[6]通过对澳大利亚深度碰撞数据库中的案例进行碰撞模拟以评估AEB 系统的有效性,发现AEB 系统不仅可以减少20%~25%的死亡率和25%~35%的受伤率,且能大幅降低事故风险。Rosén 等[7]通过研究AEB系统对减轻行人伤害的影响,发现在40°视角范围内,能减少40%的行人死亡率和27%的行人受伤率。 Liu 等[8]通过分析CIDAS(China in-depth accident study)数据库中的真实事故案例,发现AEB系统的碰撞时间(time to collision, TTC)为1 s、制动减速度为0.9g时可以避免57.5%的重伤及死亡事故。
但AEB 的影响并非总是正面的。Páez等[9]通过对马德里的50 起汽车与行人碰撞事故进行再现并加装AEB 系统,发现AEB 可以避免42%的汽车与行人碰撞事故,但随着碰撞速度的降低,有10%的事故中行人头部损伤会增加。韩勇等[10]通过对事故视频进行再现并加装AEB 系统,发现在碰撞时间为1 s的工况下,车速降低效果最显著,但AEB 会增加人体头地碰撞损伤风险。
已有研究表明,AEB 能不同程度地降低事故发生率,但不能完全避免事故[11]。通过对少量未避免事故的分析发现,此类事故中人体损伤可能增加。在车辆智能化大背景下,AEB 技术必将全面推广应用,到时绝大多数汽车均将装备AEB 系统。此种条件下,未避免事故具有哪些基本特征、特别是现有AEB技术在实践中将会引入哪些风险,亟需探索。
事故场景是测评智能车技术的有效手段,也是事故特征的重要组成,因而构建不同状态下的危险场景已成为当前的研究热点。比如,Chen 等[12]再现CIDAS数据库中汽车-行人事故,并提取典型事故场景以研究我国的人车碰撞事故特征;欧洲高级保护系统(advanced protection systems, APROSYS)项目对德国事故数据库进行挖掘后获得3 种典型车辆碰撞行人的事故场景以评估AEB 性能[13];刘颖等[14]对上海道路上发生的典型车辆与行人碰撞的危险工况进行筛选,利用聚类分析获得5 种典型车辆碰撞行人的危险场景;苏江平等[15]通过车载诊断系统对中国5 个城市的11 辆乘用车进行驾驶数据采集,获得65 个车辆与行人发生碰撞的工况,并提取了典型危险场景。由此可知,为了解加装AEB 后的汽车撞人事故特征及AEB 可能带来的风险,先建立未避免事故的典型场景可行且极具价值。
为此,本研究将先基于Pc-Crash 软件再现187例真实事故,并结合事故视频、再现结果采集人车碰撞前相关参数,进而对事故车辆加装AEB 系统,并通过Carsim 与Simulink 联合仿真以获得不能避免碰撞的案例,接着再用Pc-Crash 软件仿真未避免案例以获得人体损伤信息,然后用统计分析等方法获得未避免事故的典型场景及总体特征,最后再在场景基础上研究未避免事故的损伤特征并揭示其规律。
1 研究方法
1.1 数据来源
研究所选视频主要来源于课题组前期服务于CIDAS、NAIS等横向项目及国家重点研发、国家自然科学基金等纵向项目所积累的案例,并按照以下的原则对事故视频进行严格筛选,最终得到187 例符合本研究的事故视频案例,并对其逐个进行事故再现。
(1)事故视频须能观察到事故全过程。
(2)事故车仅为Sedan/SUV,不包括公共汽车等,一辆车至少须与一个行人发生碰撞。
1.2 事故再现、碰前参数与数据采集
1.2.1 事故再现
Pc-Crash 作为事故再现领域广泛应用的软件,其精度已被诸多学者验证[16-18]。本研究严格按照文献[17]~文献[19]中所述流程再现事故,并在事故再现前按照文献[20]中所述方法估算车辆与行人速度。接下来通过一例真实案例对事故再现过程进行演示,以说明事故再现结果的可靠性。
(1)事故介绍
由监控拍摄的一段视频显示,在我国某城市转弯路口处,一位中年女性步行穿过马路,与左侧黑色小轿车发生碰撞,碰撞发生时事故车辆立即制动,行人在车辆发动机盖上翻转一周后落地。
(2)事故现场再现
通过视频提取事故现场重要信息,利用仿真软件搭建与事故现场同类型的T 字型路口。并依据实际事故车辆的各项基本参数(轴距、轮距、车辆长宽高及质量等)对仿真软件中的车辆模型进行修改。行人模型则依据视频及我国人体实际参数[21]对假人模型的身高、体质量及姿态进行修改后获得。
(3)仿真与验证
仿真开始前对车速及行人速度进行估算。根据车身长度L和一段时间内行驶过的车位数N,计算出在此段时间内车辆行驶距离为
通过逐帧播放事故视频,记录车辆行驶距离S所需的帧数,从而计算出行驶时间为
式中:T为车辆行驶距离S所需的时间,s;n为车辆行驶距离S需要的帧数;ne为视频里1 s 内需要的帧数(不同视频格式的帧率也不同)。
由距离S和时间T可得到车速为
式中v为碰撞速度,km/h。
本案例中,先预估车辆和行人速度的区间,分别为25~26.5 和5~6.5 km/h。然后仿真再现,要求仿真中人体运动学响应与实际事故中一致,经多次迭代优化后发现车速取26 km/h、行人速度取6 km/h、车辆制动协调时间取0.2 s时,仿真与事故视频最吻合(见图1)。可以看出,仿真中车辆的行驶轨迹、行人运动轨迹、行人姿态、最终停止位置等信息都与视频高度一致。最后对人体损伤进行验证,发现仿真中车辆所致15 ms 头部损伤准则HIC15(head injury criterion)为176.5,地面所致HIC15为160.6,根据行人头部损伤耐受极限(<700),可推断该案例中行人受轻伤,这与警方提供信息一致。其它186 例案例均按照这一方法严谨再现,以保证仿真最大限度地客观反映真实事故情况。
1.2.2 碰前参数与数据采集(1)碰前参数
为实现后续联合仿真实验,须对人车碰撞前1 s(或大于1 s)的相关参数进行采集,包括碰撞前的车速、车辆运动状态、行人速度、行人行走方向、行人姿态、人车相对位置、道路特征、路面状况、照明状况和驾驶员视野情况。
(2)数据采集
基于1.2.1 节中事故再现的结果,先采集碰撞时的车速、行人速度、人车相对位置等信息,再参考文献[10]中的方法再现碰撞前事故过程,即将碰撞时的人车相对位置作为起点,通过反向计算找出碰撞前1 s(或大于1 s)车辆和行人的运动轨迹,并采集碰前参数。再现碰撞前事故过程中,同样要求仿真中行人轨迹与事故视频中行人轨迹最大程度吻合,以保证采集的碰前相关参数最大限度地接近真实事故情况。其它186 例事故中相关数据采集中均采用此统一标准,以保证数据的可靠和一致性。
1.3 AEB系统与仿真
1.3.1 AEB系统参数选取
TTC 模型是现有模型中较为传统且经典的避撞算法[22],是指同一路径上行驶的两车保持当前速度直到发生碰撞所需要的时间,即
式中:D为相距距离;vr为相对车速。
AEB的原理是利用雷达摄像头探测与前车或障碍物的距离,然后对车辆进行制动,以避免事故发生。但其核心问题是确定制动系统恰当的介入时刻,介入过早会导致车辆过早停止,驾驶体验感变差及对行人造成恐慌,过晚会导致事故无法避免,故TTC 阈值的选取尤为重要。Hamdane 等[23]研究发现在碰撞前1 s(TTC=1 s),大多数行人与车辆之间的横向距离小于3 m,此结论对主动安全系统研究方面意义重大。韩勇等[10]研究发现,在碰撞时间TTC为1 s的工况下,车速降低效果最为明显。本研究综合以上TTC的取值范围,最终将TTC取值为1 s。同时,本研究在满足研究需要的前提下选用成本低[24]的毫米波雷达作为 AEB 探测传感器,探测距离为50 m。根据Chen 等[25]和杨娜等[26]研究结果,将探测器角度设置为40°,不仅能够在碰撞前1.0 s 检测到“障碍物上”93%的行人,且兼顾探测器的成本和系统控制算法的复杂性,故本文探测角度取40°。
1.3.2 联合仿真实验
通过使用Carsim 与Simulink 软件搭建联合仿真模型,以对AEB 的效能进行研究,此实验方法在该研究领域已被广泛应用。本研究为实现Carsim 与Simulink 的数据传输,对车辆动力学模型的输入输出接口进行定义。输入信号为主缸压力,输出信号包括本车车速、相对速度、前方目标距离。同时根据1.2.2 节中碰前参数采集结果,利用Carsim 搭建与事故中相同的车型、行人步态和路面类型,并对人车相对位置、车速、行人速度等参数进行设置,结合Simulink 搭建的AEB 算法模型,将其添加到事故车辆中进行联合仿真。本研究仅考虑AEB 自身的作用,暂不考虑驾驶员和行人存在的应急反应。
1.4 统计分析
研究将采用SPSS 软件中Kruskal-Wallis H 和Mann-Whitney U 检验方法[27],分别对加装AEB 后6类场景中的行人头部/胸部/臀部损伤差异和6 类场景中加装AEB 前后行人头部/胸部/臀部的人车碰撞损伤与人地碰撞损伤差异进行显著性检验,检验水准α=0.05,根据导入SPSS 软件的损伤数据得出的P值来判断不同场景下的行人头部/胸部/臀部损伤是否具有差异。通常P<0.01 时,有极显著统计学差异;当0.01≤P<0.05 时,有显著统计学差异;当P≥0.05时,不具有显著统计学差异。
采用层次聚类分析法[28]提取未避免事故的人车碰撞典型场景。参照文献[29]和文献[30],选取3类9个参数为名义尺度变量(nominal),分别为:照明情况、道路特征、路面状况3 个环境参数,车速、车辆运动状态、视野是否遮挡3 个车辆参数以及行人速度、行人运动状态、行人行走方向3 个行人参数。各变量的取值见表1。
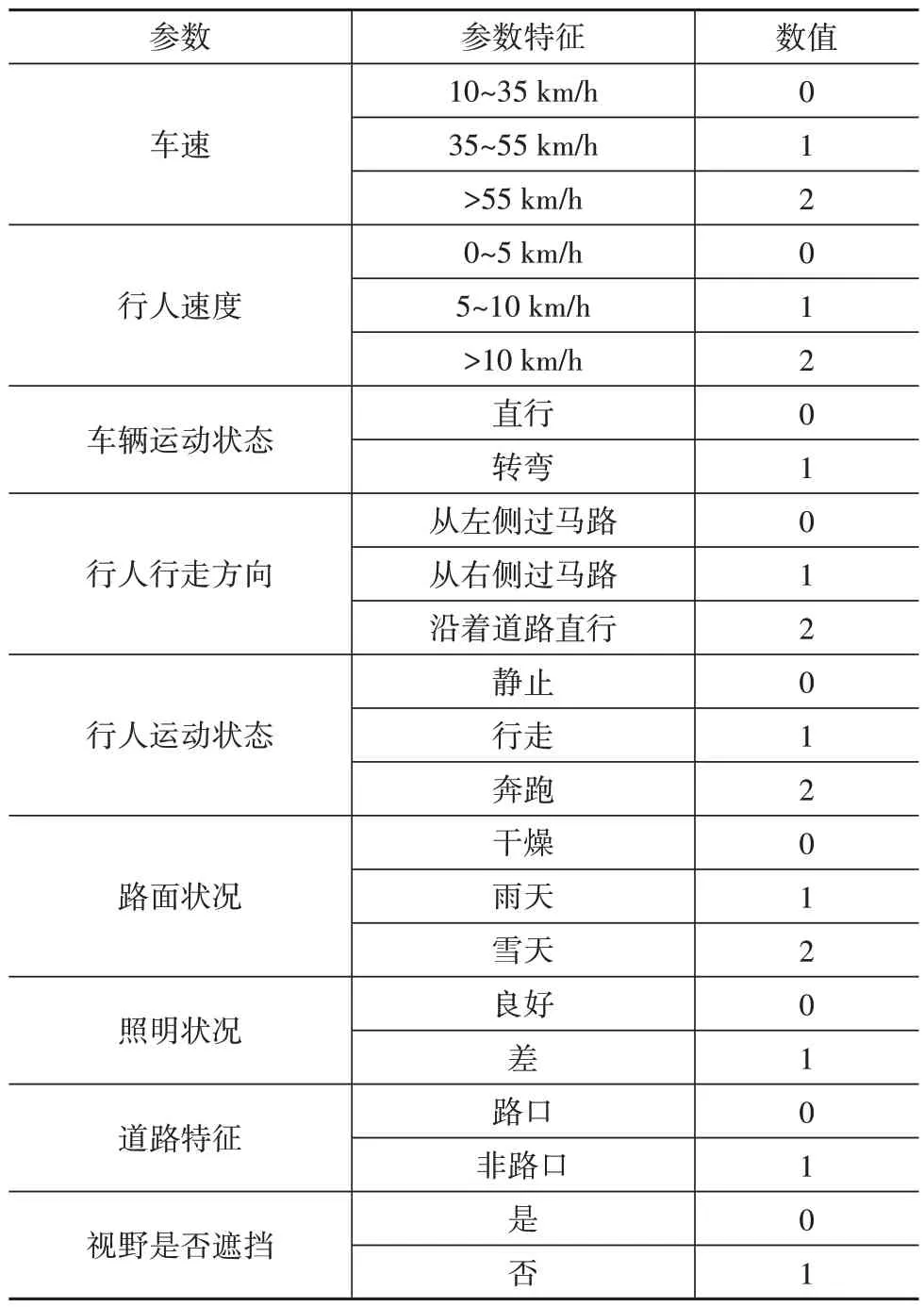
表1 人车事故的场景参数与参数特征
1.5 损伤评价指标
(1)头部损伤指标 采用1971 年美国运输部提出的头部损伤标准HIC进行评价,HIC定义为
式中:t2-t1表示HIC达到最大值的时间间隔;a(t)表示头部质心合成加速度。在实际应用中最大时间间隔取15 ms,HIC15的安全界限值为700[31]。利用PC-Crash 将仿真后的人体头部减速曲线数据输出,再依据式(5)运用Matlab编程计算获得HIC15。
(2)胸部损伤指标 采用胸部3 ms 合成加速度作为胸部损伤指标,其安全界限值为60g[31]。与获得HIC15的计算方式类似,根据输出的胸部减速度曲线,运用Matlab编程计算获得胸部损伤指标。
(3)臀部损伤指标 采用碰撞力作为臀部损伤指标,文献[32]中给出的盆骨耐受极限为10 kN。碰撞力可从Pc-Crash仿真结果中直接获取。
2 结果
2.1 未避免事故总体特征
联合仿真结果显示,187 例事故中有114 例(61%)事故在AEB 的作用下避免了碰撞,但仍有73例(39%)事故未避免,未避免事故的总体特征如下。
2.1.1 事故环境特征
统计发现,在道路类型分布中,有44例(60.27%)发生在非路口,29 例(39.73%)发生在T 字路口或十字路口。在路面状况分布中,有48 例(65.75%)发生在干燥路面,14 例(19.18%)发生在雨天湿滑路面,11例(15.07%)发生在积雪路面。在照明情况分布中,有64 例(87.67%)发生在照明条件良好环境下,9例(12.33%)发生在照明条件差的环境下。
2.1.2 碰撞前事故特征
在碰撞发生前1 s 的汽车速度分布中(图2),有9 例(12.33%)车速在[20,30)km/h 区间内,20 例(27.4%)车速在[30,40)km/h 区间内,22 例(30.13%)车速在[40,50)km/h 区间内,16 例(21.92%)车速在[50,60)km/h 区间内,6 例(8.22%)车速 ≥60 km/h。
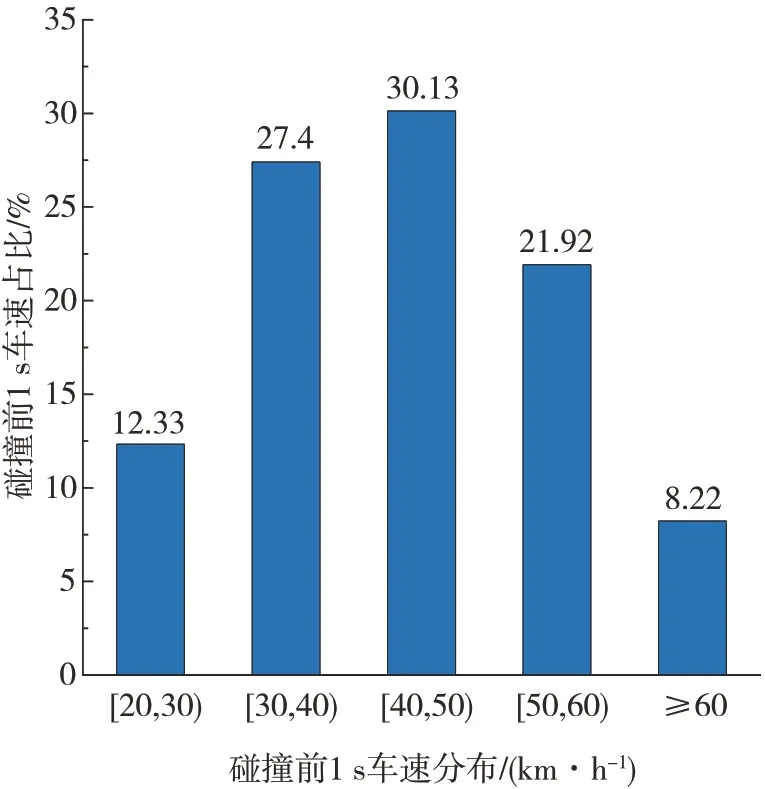
图2 碰撞前1 s车速分布
在行人行走方向分布中,有48 例(65.75%)行人从右侧过马路,有25 例(34.25%)行人从左侧过马路。在车辆运动状态分布中,有72 例(98.6%)是直行状态,有1 例(1.4%)是转弯状态。在碰撞车型中,有48 例(65.75%)是轿车,25 例(34.25%)是SUV。在视野遮挡情况分布中,有38例(52.05%)驾驶员视野被遮挡,35 例(47.95%)驾驶员视野无遮挡。在行人运动状态分布中,有40 例(54.79%)行人处于奔跑状态,31例(42.47%)行人为行走状态,2例(2.74%)行人为静止状态。
2.1.3 碰撞时事故特征
在加装AEB 的汽车碰撞速度分布中,有18 例(24.66%)车速在(0,10]km/h 区间内,28 例(38.35%)车速在(10,20]km/h 区间内,14 例(19.18%)车速在(20,30]km/h 区间内,10 例(13.69%)车速在(30,40]km/h 区间内,3 例(4.12%)车速 >40 km/h(见图3)。在行人碰撞速度分布中,有11 例(15.07%)行人速度在(0,3]km/h 区间内,31例(42.46%)行人速度在(3,6]km/h 区间内,14 例(19.18%)行人速度在(6,9]km/h 区间内,12 例(16.44%)行人速度在(9,12]km/h 区间内,5 例(6.85%)行人速度 >12 km/h(见图4)。
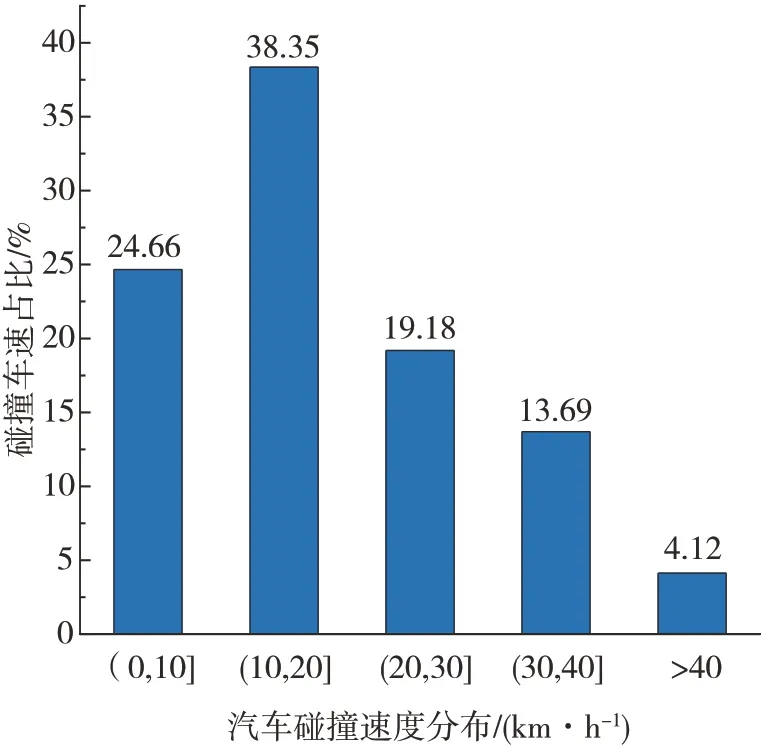
图3 汽车碰撞速度分布
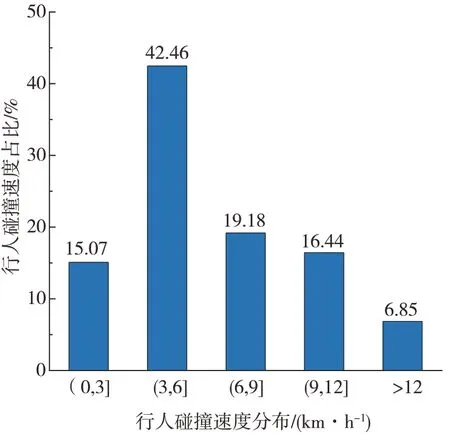
图4 行人碰撞速度分布
可知碰撞车速主要集中在(0,10]、(10,20]、(20,30]和(30,40] km/h 这4 个区间内,占比95.88%, 即AEB 能够使绝大多数事故中汽车碰撞车速降低到40 km/h 以下的中低速区间。行人碰撞速度则主要集中在(0,3]、(3,6]、(6,9]和(9,12]km/h这4个区间内,占比93.15%。
2.2 未避免事故典型碰撞场景
利用SPSS 软件对73 例未避免事故进行聚类分析,共得7 类场景。但第4 类场景中行人运动状态、路面状况、视野是否遮挡、道路和行人行走方向等特征均不明显,无法提取特定的人-车事故碰撞场景。加之除第4 类(10 个案例)场景外,其它场景案例占总样本的86.3%[33],具有足够的代表性。因此,在研究中剔除第4类场景,得6 类未避免事故典型碰撞场景,参数特征见表2。
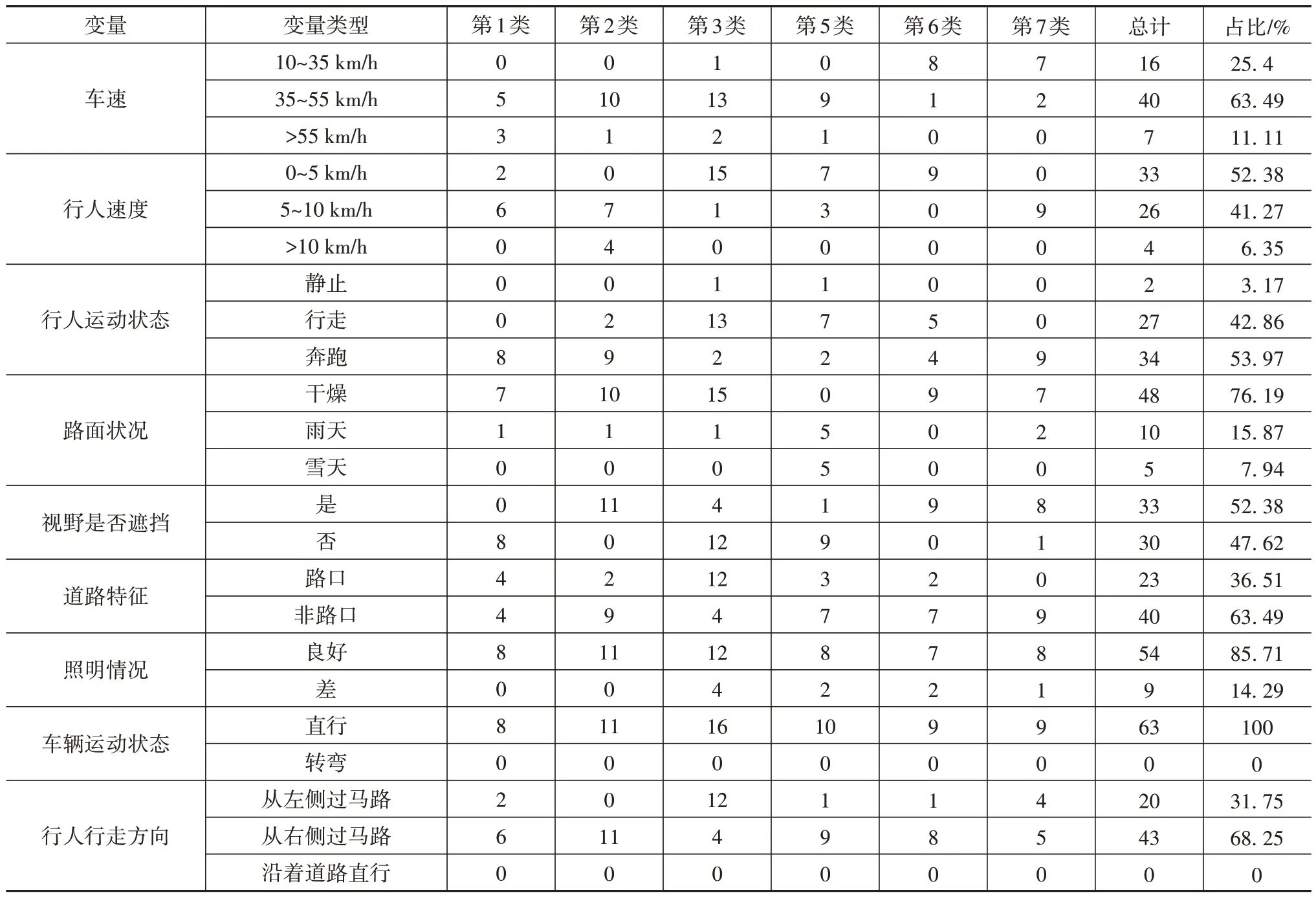
表2 各类典型事故场景下的参数特征
为对聚类场景中的不明显特征(如表2 中的道路特征,路口案例4个,非路口案例4个,无法提取典型特征)做进一步分析,参照文献[33]中根据事故伤亡程度对不明显特征进行分析的方法,将事故伤亡程度划分为3 个等级: 中轻度(AIS1-AIS2)、严重(AIS3-AIS5) 和致命(AIS6)。根据Li[34]研究HIC 与AIS 的关系,对事故中行人损伤等级进行划分。同时根据胡林等[33]选用参数特征的方法,即选取事故伤亡程度为“严重”和“致命”样本数量较多的和事故样本总数量高于伤亡严重参数特征下的样本数量的参数特征作为场景中对应的参数特征,最终得6 类未避免事故典型场景(表3),示意图见图5。

表3 事故伤亡程度分析后的各类典型事故场景的参数特征
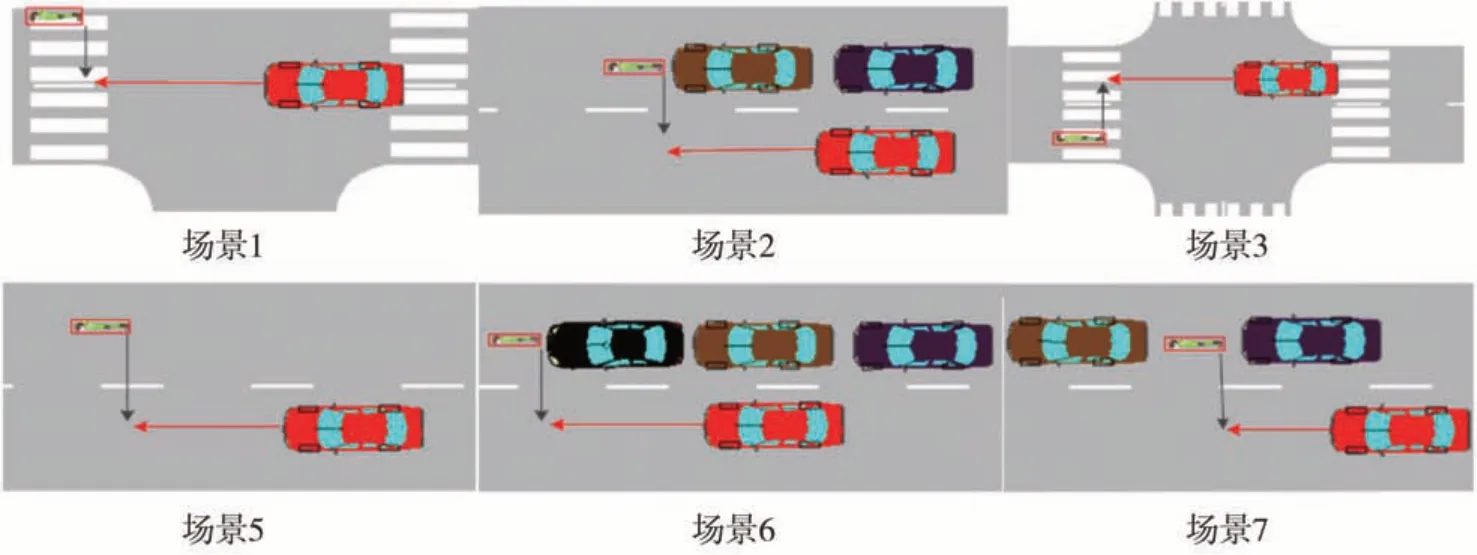
图5 6类未避免事故典型碰撞场景示意图
6 类未避免事故典型碰撞场景中人车碰撞胸部损伤有极显著统计学差异(P<0.01),头部和臀部损伤存在统计学差异(P<0.05);人地碰撞中胸部损伤存在统计学差异(P<0.05),但头部和臀部损伤均不存在统计学差异(P>0.05)。不同场景中的人车碰撞损伤均有统计学差异的结论进一步说明2.2 节中所得6类场景具有代表性。
2.3 相同场景中加装AEB前后人体损伤差异
在人车碰撞损伤方面,相同场景中加装AEB 后的行人头部损伤均显著低于加装AEB 前的头部损伤,见图6,这与韩勇等[10]研究结果一致。在行人胸部和臀部损伤方面均观察到类似现象,表明加装AEB后可显著降低人车碰撞损伤。
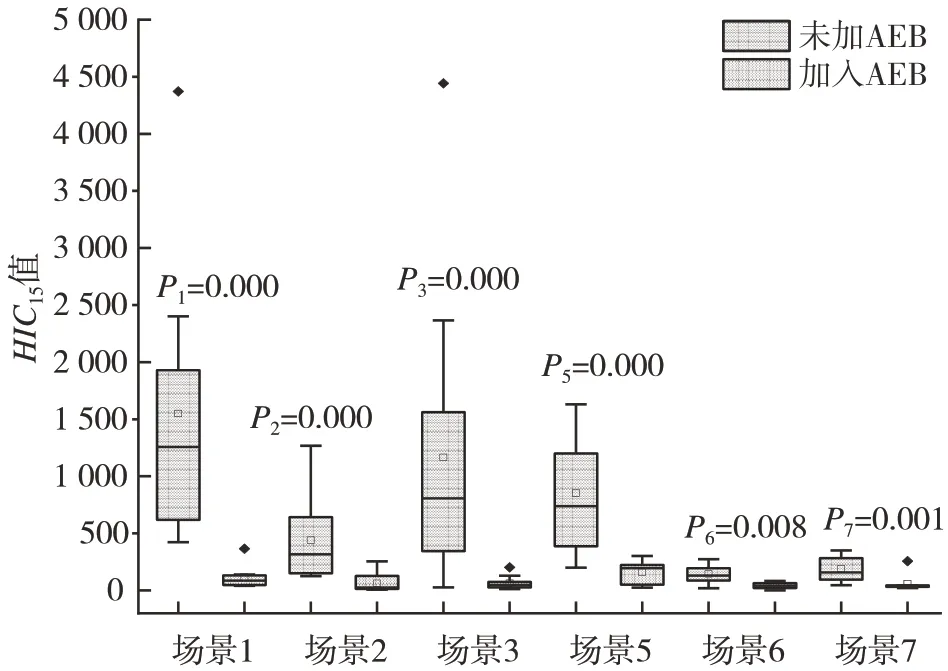
图6 6类场景下加装AEB前后人车碰撞头部损伤对比箱型图
在人地碰撞损伤方面,加装AEB 前后的人地碰撞头部损伤见图7。总体上人地碰撞损伤有降低趋势。但在场景5 和场景7 中,加装AEB 前后头部损伤之间不具有显著统计学差异(P>0.05),表明这两类场景中加装AEB 未显著降低头地碰撞损伤;其它场景中,人地碰撞头部损伤均显著降低。在胸部-地面碰撞损伤方面总体有降低趋势,但场景2、5、6和7均未能显著降低胸部-地面碰撞损伤。臀部损伤方面则有所不同,场景2、7 中臀部-地面碰撞损伤有增高的趋势,其它场景中有降低的趋势但仅场景3 有显著性差异,见图8。

图7 6类场景下加装AEB前后人地碰撞头部损伤对比箱型图
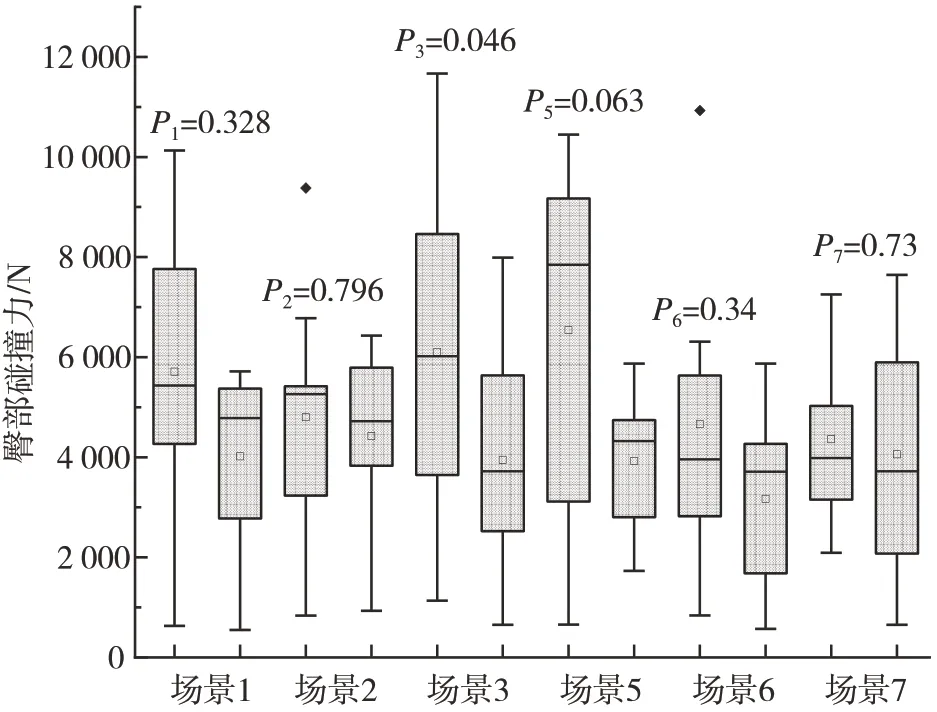
图8 6类场景下加装AEB前后人地碰撞臀部损伤对比箱型图
由上可知,6 类典型场景中,AEB 系统可以显著降低行人头部、胸部和臀部的人车碰撞损伤,但人地碰撞损伤降低方面存在不确定性。
3 讨论
上述分析发现,加装AEB 后可以避免114 例事故(61%),但仍有73 例事故(39%)不能避免。未避免事故的总体特征揭示了未来人车碰撞的可能形态,特别是碰撞车速条件,可指导设计智能车防护人体损伤研究中的实验边界条件,能为后续智能车主、被动安全研究提供有力支持。研究结果显示,未避免事故中有95.88%的碰撞车速均低于40 km/h,已有的大量研究均指出在该中低速区间内人地碰撞损伤风险不能忽视[35-38],这意味着智能车可能更须关注人地碰撞损伤。现有少量研究已经显现出这种趋势,韩勇等在文献[10]中指出,AEB可能会增加80%案例(5例中有4例)中人地碰撞损伤;而本研究中也发现很多场景中AEB 的人地碰撞损伤降低效果不确定。
6 类场景中加装AEB 后人地碰撞损伤均有增加案例,场景1~场景7 中人地碰撞损伤增加的案例百分比分别达37.5%、63.6%、62.5%、70%、66.7%与66.7%。其中,场景1 中人地碰撞损伤增加比率相对较低为37.5%,表明在此场景下,AEB增加人地碰撞损伤的风险相对较低;场景5 中人地碰撞损伤增加的比率最为突出,高达70%,表明在此场景下,AEB 增加人地碰撞损伤的风险较高;其余4 种场景中人地碰撞损伤增加的比率均大于60%。
进一步分析发现,人地碰撞损伤增加原因如下。
(1)23 个案例(58.97%)中,加装AEB 后碰撞车速降低,车速变化导致碰撞后行人落地顺序发生改变。其中,有10 例行人头部先触地,增大了头部损伤。这与文献[39]中的表述相符,行人下落过程中头部先触地,此刻的头部落地速度最大,进而损伤也增大。如图9 所示,图中A 为加装前,B 为加装后。该仿真案例中车辆加装AEB 后,碰撞车速由48降低为29 km/h,行人落地顺序由臀部先触地变为头部先触地,头部与地面的垂直碰撞速度由-3.34 变为-4.45 m/s,导致头部损伤增大。
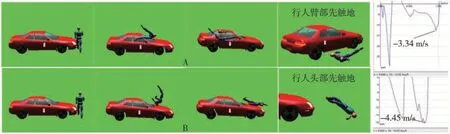
图9 加装AEB前后的仿真过程与头部接触地面时的垂直碰撞速度对比
其余13 例行人落地顺序由下肢或臀部先触地变为胸部先触地,增大了胸部损伤。这与文献[10]中的表述相似,当车辆加装AEB 后,车速降低导致行人落地顺序发生变化,从而导致落地时的旋转角速度增大,进而导致损伤增加,如图10 所示。车辆加装AEB 后,碰撞车速由50 降低为27.4 km/h,行人落地顺序由下肢先触地变为胸部先触地,使胸部落地时的角速度由14.29增加至24.48 rad/s,导致胸部损伤增加。
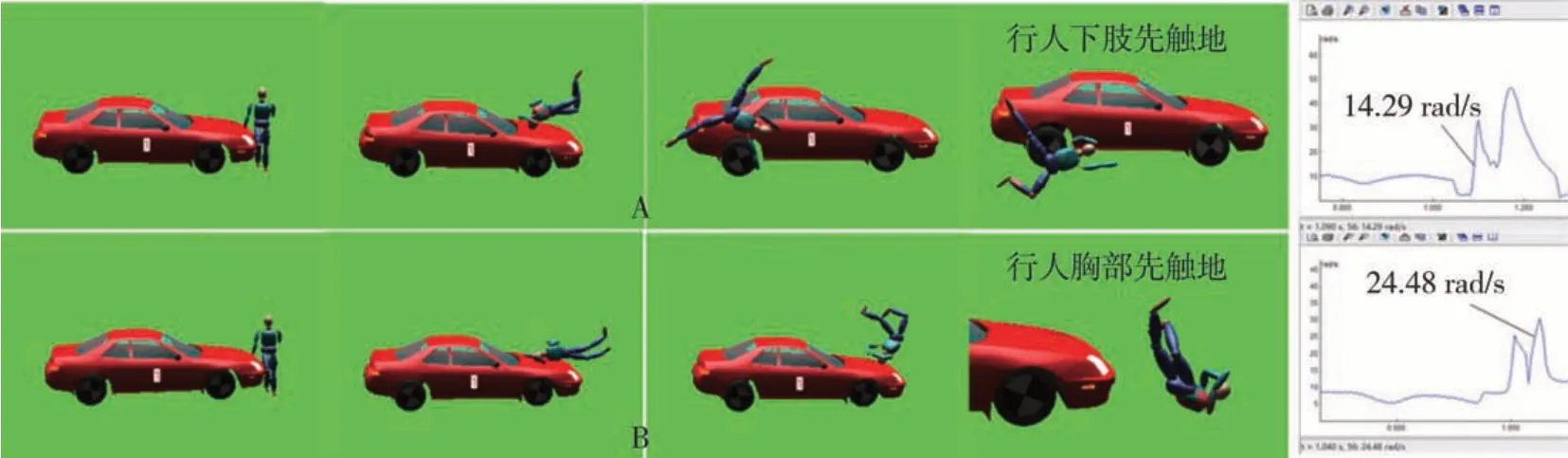
图10 加装AEB前后的仿真过程与胸部接触地面时的角速度对比
(2)9 个案例(23.08%)中,加装AEB 前由于车速较高行人被撞飞,整个过程行人与车辆只接触一次,加装AEB 后车速降低,与行人发生碰撞后,人体下肢与车辆前端发动机盖再次进行接触,产生一顺时针的加速度,使旋转速度转变为人体头部与地面的垂直撞击速度,加重了人地碰撞损伤,如图11 所示。车速由55 降低为32 km/h,但由于行人下肢与车辆前端接触导致行人下落时顺时针旋转,头部与地面接触的垂直速度由-3.34 变为-7.44 m/s,故而增大了人地碰撞损伤风险,这与文献[40]中的发现一致。针对此种情况,在AEB 的研究中可考虑当车辆撞飞行人后,系统自动检测周围交通环境,在不影响周围车辆正常行驶前提下可进行适量转向,以避免发动机盖再次接触行人下肢造成更严重的伤害。
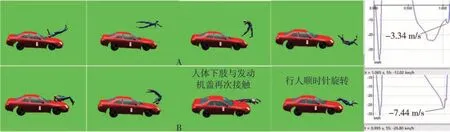
图11 加装AEB前后的仿真过程与行人落地时头部的垂直速度对比
(3)7 个案例(17.95%)中,行人从路边突然冲出,驾驶员视野被遮挡,加装AEB 后车速降低,但由于行人速度并未改变,导致人车碰撞位置由侧面碰撞变为正面碰撞,增大了车辆撞击行人的能量,从而增加了行人损伤风险。图12 给出加装AEB 前后的碰撞过程对比。该案例中加装AEB 车速由40 降低为19.78 km/h,人车碰撞位置由侧面的剐蹭变为前风窗玻璃的碰撞,增大了车辆碰撞行人的能量,导致人地碰撞过程中臀部损伤增大。表明在后续的研究中AEB 系统应选用角度更大的摄像头,增大预警范围,以更好地预测周边行人的动向,避免事故的发生。
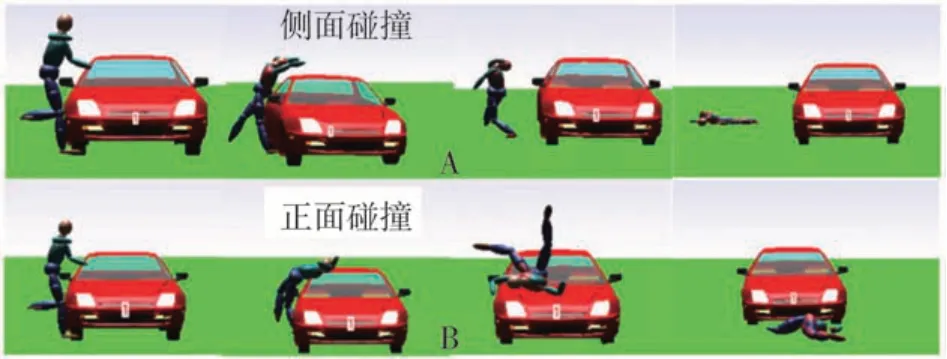
图12 加装AEB前后车辆与行人碰撞位置的变化
4 结论
通过再现187 例真实事故案例、采集碰撞前事故数据,然后对事故车辆加装AEB 系统,联合仿真后再用统计学手段分析人车碰撞典型场景与事故特征,获得以下结论。
(1)加装AEB 系统后可以避免61%的事故,未避免事故(39%)主要发生在照明条件良好、路面干燥的非路口。碰撞前1 s车辆大都处于直行状态,车速主要集中在30~60 km/h 区间内,驾驶员视野被遮挡,行人从右侧过马路且处于奔跑状态,事故车型主要为轿车。碰撞时车速主要集中在40 km/h 以下的中低速区间内(95.88%),行人速度主要集中在12 km/h 以下的区间内(93.15%)。
(2)以人车事故发生所涉及的环境(照明情况、道路特征、路面状况)、车辆(车速、车辆运动状态、视野是否遮挡)、行人(行人速度、行人运动状态、行走方向)3 个方面9 个变量为基础,并结合行人损伤程度准确选取道路、行人运动状态、行人行走方向和路面状况等较复杂变量的参数特征,最终获得6 类典型事故场景,样本覆盖率为86.3%。
(3)未避免事故中车辆加装AEB 后,AEB 系统在降低人地碰撞损伤方面存在不确定性。6 类未避免事故典型场景中,有39 例(61.9%)事故中行人头部/胸部/臀部损伤增加。分析发现,人地碰撞损伤增加的主要原因有AEB 降低车速导致行人落地顺序改变、人体下肢与车辆前端再次接触、人车碰撞位置发生变化等。
(4)研究的局限在于事故案例有限,可能会对分析结果的可靠性产生一定影响,后续研究中须补充更多案例,以进一步证实相关结果及结论。
