空间望远镜观测规划系统发展综述
2023-06-24蒲奕铮张柏楠张永北京空间飞行器总体设计部
蒲奕铮 张柏楠 张永(北京空间飞行器总体设计部)
1 引言
近一个世纪以来,有关宇宙学的观测和理论都得到了快速发展,人类对宇宙起源演化、物质组成及其相互作用机理都有了更深入的认识。与此同时,科学研究对天文观测手段也提出了更高的要求,用于进行观测的望远镜也随之不断发展。空间望远镜运行在宇宙空间中,不受地球自转、大气透过率和稳定性等地面外部因素的影响,拥有比地基望远镜更长的观测窗口、更宽的观测频谱和更高的观测精度。基于以上背景,为了支撑天文学的发展,获取更多的科学成果,建造空间望远镜进行天文观测是必然的发展方向。然而,空间望远镜造价高昂,建造及维护成本极高,为了保证望远镜在生命周期内能够取得足够多的观测成果,需要对其观测任务进行合理的规划,尽可能提高其观测效率。
国际上空间望远镜的建设起步较早,出于提高观测效率和保障望远镜运行的目的,天文观测领域高度重视任务规划研究,各种任务规划软件在各型号望远镜上得到了实践验证,并在型号间的继承过程中得到了迭代优化。以美国国家航空航天局(NASA)为代表,其在研制哈勃空间望远镜(HST)的同时开展了“科学规划交互知识系统”(Spike)的研究工作,并将Spike系统泛用化后沿用在了斯皮策空间望远镜(SST)、远紫外光谱探测器卫星(FUSE)、钱德拉X射线望远镜(CXO)、斯巴鲁望远镜(Subaru)、詹姆斯·韦布空间望远镜(JWST)等一系列地基或空间天文观测设施的任务规划系统中。由于各个空间望远镜的科学目标以及携带的仪器设施并不相同,它们进行任务规划时面临的困难与采用的方法也并不一致。但望远镜观测规划问题也存在很大的共性,在解决这些规划问题时,一般将其建模为约束满足问题进行求解,并通过长期规划和短期规划相结合的方式构建完整的规划流程。
本文对国外三个典型的空间望远镜观测规划系统进行了详细调研,并就它们规划系统的方法设计,系统架构以及规划算法进行了介绍,能够为我国空间望远镜观测规划系统的设计提供参考。
2 空间望远镜观测规划问题
空间望远镜观测规划系统任务是考虑望远镜运行的具体情况,结合科学任务的需求,为观测任务确定具体执行时间,保证可观测时间得到充分利用。空间望远镜运行在宇宙空间中,受到运行轨道所在的宇宙空间条件、卫星平台能力等各种不同约束,导致其规划问题是一个复杂约束条件下的多目标优化问题。问题难点主要体现在以下方面:
1)根据望远镜的运行轨道不同,规划时考虑约束条件不同。运行在近地轨道的望远镜需要考虑地球遮挡、地气杂散光以及南大西洋异常区等约束;运行在拉格朗日L2点或其他轨道的望远镜不需要考虑这些问题,但需要根据其设计需要考虑动量卸载、热控平衡等其他约束。
2)在传统的规划问题中,约束条件一般用构建惩罚函数、生成不等式判断条件等方法来进行处理。但空间望远镜观测过程中受到的约束条件复杂,且需要调用仿真模块对望远镜轨道、姿态进行计算,无法通过单一方式进行简单处理,必须对约束进行完整建模判断。
3)望远镜的观测规划受到其科学目标的约束。如巡天观测强调对天区的覆盖;超新星观测强调对突发任务的调度;部分观测任务需要重复进行,且不同任务之间存在先后顺序的约束。这些科学目标会对规划系统提出额外的需求。
4)在进行任务规划时需要考虑平台的具体性能,不同望远镜的科学目标、携带的观测载荷、平台的构型布局不同,其观测规划系统也需要针对望远镜自身的特点进行有针对性的设计。
5)观测任务数量极大,例如HST每年需要进行10000~30000次观测。这导致空间望远镜的观测规划问题是多项式复杂度困难问题(NP-Hard Problem),随着目标数量增大而变得极为复杂,难以用传统规划方法解决,且难以找到全局最优解。
6)规划周期长,空间望远镜的寿命一般为数年,HST甚至已经运行了32年。规划系统需要统筹安排整个规划周期内的观测任务,保障望远镜全生命周期内的观测效率。
3 国外空间望远镜观测规划技术发展情况
美国在空间望远镜的研制发射以及巡天研究方面一直处于领先地位,NASA于1986年发射了第一颗天文红外卫星IRAS并成功进行了首次天基巡天观测,之后又发射了“宇宙背景探测者”(COBE)卫星、HST、广域红外巡天探测器(WISE)、斯皮策空间望远镜等多颗天文卫星及空间望远镜。欧洲航天局(ESA)也已经发射过赫歇尔空间望远镜(Herschel)、盖亚空间望远镜(Gaia)等进行天文观测。为了对空间望远镜的观测任务进行合理的规划,提高观测效率,达成科学目标,国际上对于空间望远镜观测任务的规划方法有较为深入的研究,各种任务规划软件在各型号望远镜上得到了实践验证,并在型号间的继承过程中得到了迭代优化。下面将对具有代表性的HST、JWST和欧几里得空间望远镜(Euclid)的规划系统进行介绍。

HST在轨照片
哈勃空间望远镜
HST是美国于1990年发射的大口径空间望远镜。HST主镜直径2.5m,搭载了用于光学观测、紫外波段观测的多种观测仪器[1]。HST作为人类历史至今为止工作时间最长的空间望远镜,在32年的服役历史中拍摄了海量的照片,为天文学发展提供了宝贵的数据。HST观测规划系统的开发以及优化过程也为空间望远镜的观测规划系统发展提供了有价值的经验。
(1)HST规划问题特点
为了让昂贵的HST得到充分利用,NASA从科学界收集了很多观测提案作为待选任务,其待观测任务数量远超实际观测能力。因此对观测序列进行规划,保证可观测时间得到充分利用进而完成科学研究目标,对HST来讲至关重要。但观测任务的庞大数量以及观测过程中存在的众多约束条件决定了HST的观测序列优化是一个非常困难的工程问题。
在整个观测过程中,对HST产生最多限制的便是其在近地轨道运行时的众多约束条件。在规划时首先需要确定在观测过程中HST受到的各种外部和内部约束条件。NASA将HST受到的约束条件分为如下几类[2]:①绝对约束,包括日月规避角、南大西洋异常区等轨道观测条件限制。②相对约束,包括观测任务的先后顺序、相同窗口内执行的分组约束、最小化姿态机动次数的集中观测约束。③资源约束,包括数据容量约束、通信窗口约束、能源约束。在综合考虑全部的约束条件后,就可以给出观测任务在时间轴上的可观测窗口[3]。HST观测规划的目标即是为观测任务在可行的观测窗口中找到最佳窗口,同时使在轨可观测时间内完成的观测任务总数达到最大。
(2)HST观测规划方法
在进行观测规划时,NASA对科学家提出的科学观测提案进行筛选并对格式进行处理,将这些观测提案转化为望远镜观测指向、相对和绝对约束等信息,发送给规划系统[4]。具体规划方法分为长期规划和短期规划两个部分。

HST观测规划系统流程
为了满足HST对大量受到复杂约束的任务进行编排的需求,NASA研发了Spike系统用于HST观测序列的长期规划。Spike系统最初采用了神经网络算法,将各种约束条件整合进入代价函数,最终通过对神经网络的训练使得观测序列整体的代价函数达到最小[5]。虽然神经网络算法之后被启发式算法替代,但其对大规模数据进行处理的思想被沿用在了后续的算法中。Spike通过启发式算法将一年内的观测任务按照时间窗口划分到以周为单位的任务组中,从而完成了长期规划。Spike系统集成的Spike工具包提供了约束满足问题的对象类和优化函数的接口,沿用在了JWST、甚大望远镜(VLT)、Saburu等其他航天器上,用于解决它们的各种规划问题[6-7]。
Spike系统的规划结果作为输入提供给短期规划系统——“科学规划与调度系统”(SPSS),其功能是在长期规划的基础上进行短期规划,将每个任务安排到具体的时间窗口上。除了观测任务的执行外,SPSS系统将望远镜在轨执行的轨道维持、数传通信等飞行任务纳入了考虑范围。SPSS建立了包括动力学部分在内的望远镜详细模型,在此基础上采用贪婪算法作为调度策略,并基于评价算法对任务的执行难易度、科学价值、观测效率和其他因素进行评价,将每一个任务安排到局部最优的时间窗口上[8]。
詹姆斯·韦布空间望远镜
JWST是NASA设计的6.5m口径大型望远镜,经多次推迟后最终于2021年12月25日发射。JWST采用先进的分块可展开式主镜,搭载了4种红外探测仪器,将在HST的基础上开展进一步的宇宙观测,探寻宇宙大爆炸早期形成的物体,研究星系演化的方式并观测银河系外行星系统[9]。

JWST总装完成后测试照片
(1)JWST规划问题特点
JWST的运行轨道位于日地拉格朗日L2点,观测环境与近地轨道大为不同:JWST不再受到地球遮挡和南大西洋异常区的影响,且更容易定位导星,相对于近地轨道的HST等望远镜拥有更大的观测窗口和更好的观测条件。JWST巨大的遮光罩能够阻挡来自太阳、地球和月亮等天体的光线,为观测仪器提供良好的观测环境[10]。
因为拉格朗日L2点的轨道为JWST带来了长时间、不间断的观测窗口,因此,它的长期观测规划与有明确开始、结束时间的时间驱动的地面以及地球轨道望远镜不同,采用的是“基于任务驱动”(Event Driven Operations)的规划。每一项观测任务的描述文件中将包含最早开始时间、最晚开始时间和最晚结束时间,只要观测任务能够在规定的时间窗口中完成即可。但JWST也有必须在时序上进行安排的任务,如轨道维持以及太阳光压的动量卸载。这些任务将严格按照需要执行的时间点来进行安排[11]。
(2)JWST观测规划方法
虽然在规划时没有采用时间驱动的规划方式,但与HST相同,JWST也采用了长短期结合的观测序列规划方式,并沿用了为HST开发的Spike系统作为规划引擎。

JWST观测规划系统架构
JWST长期规划(LRP)的任务是考虑一年内的任务池,并优化整个观测序列,在确定每个观测任务的观测窗口的基础上将其平滑地分配到整个周期中。LRP将导星可获取数量作为重要优化指标,并会将指向相近的任务分在同一组内,以最小化组内任务之间的姿态机动角度。长期规划需要随着观测实际执行结果、运行中出现的异常来对规划结果进行实时更新[12]。
JWST的短期规划方法与HST也较为相似,对几周长度的观测任务组进行规划,并将规划结果加入到短期规划(STS)基线中,STS基线将包含未来2~3周内的详细观测规划。短期规划的主要任务是最大化观测效率,主要优化目标包括最小化观测之间的姿态机动次数、减少动量卸载次数、最小化观测时间线上的空白时间。JWST将观测任务规划描述为多目标优化问题[11],通过基于差分进化方法的第三代广义差分进化算法(GDE3)进行解决[13]。GDE3引入了了第二代非支配排序遗传算法(NSGA-Ⅱ)中非支配排序的概念,能够较好地完成对多目标优化问题的进化计算。
欧几里得空间望远镜
Euclid空间望远镜是ESA目前在建的1.2m口径宽视场空间望远镜,轨道运行在日地拉格朗日L2点[14]。Euclid主要的科学任务为研究有关暗能量和暗物质的基本问题,被设计优化以用于观测弱引力透镜效应和进行星系分类两种天文学任务,计划在6年内对15000平方度的天区进行广域巡天观测,并对40平方度的天区进行深度巡天[15]。为了对Euclid的观测任务进行合理的安排规划,ESA开发了Euclid 巡天系统(ESS)[16]。

Euclid空间望远镜
(1)Euclid规划问题特点
Euclid的观测任务同样受到约束条件的限制,如轨道限制、太阳方位角限制、大角度姿态机动次数限制等。以上这些会对Euclid的观测任务产生影响的约束条件由任务控制中心收集整理,并合理分配到任务执行的各个环节进行处理[17]。
由于巡天观测是Euclid的主要任务,其任务规划面临的最大难点是保证在有限的时间内完成对海量天区的观测覆盖。这导致Euclid的规划流程与其他望远镜存在较大的差别,Euclid巡天工作组通过建立“巡天参考定义”(RSD)来对6年任务周期内的巡天任务进行统筹规划。由于Euclid位于日地拉格朗日L2点,各天区的观测窗口长度较长,可观测时间较为集中,因此,RSD在规划时会在满足约束条件的前提下将相邻的天区分在同一组,在一段时间内对一片相邻天区进行集中观测以提高观测效率。RSD最终给出了计划内的15000平方度的广域巡天和40平方度深度巡天的任务规划结果[18]。
由于Euclid任务的特殊性与巡天优化的复杂性,在开发具体的巡天任务规划系统时较难完整沿用其他望远镜的观测规划系统,只能继承这些系统的部分组件。ESA针对Euclid的任务特点,开发了ECTile系统来完成RSD的构建工作。
(2)Euclid观测规划方法
ECTile将观测任务规划分为两个阶段。第一阶段,ECTile将首先对预计能取得极大科学成果的天区进行观测,之后再将剩余的时间用于对广天区的巡天观测。第一阶段观测目标的共同特点是目标的观测价值较高,在给定时间内可观测窗口短,观测方位甚至观测指向固定,大部分为深场观测。在完成对高价值目标的编排后,第二阶段将进行“广域巡天”(EWS)规划,Euclid的大部分工作时间将用于进行EWS观测。
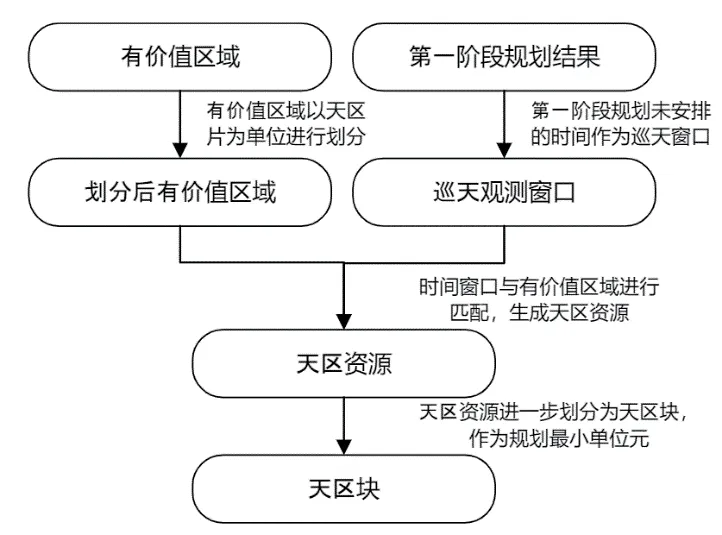
ECTile第二阶段规划流程
为了保证规划结果能够覆盖全部待观测天区,Euclid对天区进行切分,从最大到最小划分为有价值区域、天区资源、天区块。通过逐层划分将大面积天区拆分为小块天区,并在每个天区块内执行具体的任务规划。有价值区域指全部待观测天区的集合,天区资源指在给定的巡天时间窗口内能够进行观测的连续天区,天区块则是在其基础上进一步划分出的更小区块,作为规划的基本单元。
ECTile采用“传播算 法”(Diffusion Algorithm)进行每个天区块内的观测序列规划。完成了每个天区块内的观测规划后,ECTile将不同的天区块按照先后顺序连接起来,在每个巡天观测窗口内将可观测时间填满,并按照纬度从高到低依次完成对各天区的观测,最终完成对全部区域的巡天覆盖。
4 结束语
空间望远镜的观测任务规划系统能够合理安排望远镜任务的具体执行时间,保障望远镜顺利在轨运行,从而达成其科学探测目标,具有极高的工程应用价值。通过对望远镜观测规划系统发展历程的研究,可以得出以下结论:
从设计思路来看,各型号望远镜均通过长期规划与短期规划分工的方式构建了规划系统。长期规划考虑部分约束条件进行全局优化,保证科学目标能够顺利完成;短期规划结合详细约束条件确定任务在时间线上的具体执行时间,保证规划结果能够顺利在轨执行。同时,望远镜的规划系统之间具有继承性,如HST的Spike系统沿用在了JWST等一系列后续型号中。
从设计约束来看,不同望远镜的科学目标、运行轨道所处的空间环境、搭载的科学载荷不同,需要对其约束条件进行完整识别和具体分析,从而有针对性地进行规划系统的设计,并保证规划结果满足约束条件。
从规划算法来看,各望远镜在前人研究的基础上针对自身任务型号特点设计了相应的规划算法。如HST针对约束复杂、任务数量大的特点采用启发式算法结合贪婪算法进行规划;JWST针对观测窗口长、优化指标多的特点采用了任务为导向的多目标优化算法;Euclid针对巡天观测覆盖面积大的特点对天区进行逐层划分,并在小块天区内使用了前瞻算法。
在我国研制空间望远镜的同时,也需要进行其配套的观测规划系统的开发工作。需要针对望远镜的科学需求、运行轨道、平台能力等影响因素设计合理的规划系统,从而保障望远镜在轨安全运行,顺利达成科学目标。