基于图像识别的智能垃圾分类小车设计
2023-06-22吴洪艳徐东萍甘尚艳
吴洪艳 徐东萍 甘尚艳

摘 要:文章基于图像识别技术设计一款可移动的智能垃圾清洁分类小车,该小车能够在行进过程中自动识别垃圾,实现垃圾清洁分类。以Arduino mega 2560为主控板,借助K210图像识别装置,采用基于卷积神经网络的算法对垃圾图像进行识别与分类,并在液晶屏上显示识别与分类结果,语音提醒垃圾桶装满信息。测试结果表明,该文设计的智能垃圾分类小车识别分类准确率高,运行平稳顺畅。
关键词:图像识别;智能小车;垃圾分类
中图分类号:TP391.4;X705 文献标识码:A 文章编号:2096-4706(2023)03-0143-04
Design of Intelligent Garbage Sorting Car Based on Image Recognition
WU Hongyan, XU Dongping, GAN Shangyan
(School of Electronic and Electrical Engineering, Lingnan Normal University, Zhanjiang 524048, China)
Abstract: Based on the image recognition technology, this paper designs a mobile intelligent garbage cleaning and classification car, which can automatically identify garbage in the process of traveling and realize garbage cleaning and classification. The Arduino mega 2560 is used as the main control board, and the K210 image recognition device is used to recognize and classify the garbage images using the algorithm based on convolutional neural network, and the results are displayed on the LCD screen to voice alert the trash can of full information. The test results show that the intelligent garbage sorting car designed in this paper has high recognition and classification accuracy and smooth operation.
Keywords: image recognition; intelligent car; garbage classification
0 引 言
隨着城市化进程的飞速发展,城市垃圾处理成为城市环境保护和可持续发展的首要任务。在此背景下,生活垃圾分类逐渐受到重视[1]。另外,科技进步促使智能化产品在人们日常生活中的应用越来越广,出现了智能家居用品、扫地机器人等智能家用电器[2]。在智慧城市的理念下,智能系统的出现大大提高了人们的工作效率。如何运用先进技术,科学高效地处理生活垃圾,促进资源再利用成为政府亟须解决的问题[3]。将图像处理技术与垃圾分类有机地融合,设计一款智能语音控制垃圾分类系统,解决传统垃圾分类依靠人工识别、分类效率低下的问题,此项工作具有重要的实用价值,可以更好地实现资源回收和再利用[4-7]。
目前市面上的垃圾分类产品大都是大型化、不可移动的,由于是固定化形式的,对没有扔入的垃圾没法处理。通过采用机器视觉和避障模块实现可移动化的垃圾分类可解决这一问题,保障大型场所室内卫生的干净整洁,实现垃圾分类,营造绿色环境。
1 总体设计方案
智能垃圾分类小车是车载分类垃圾桶,在移动过程中实现对垃圾的回收与分类。在没有寻找到垃圾的时候,小车先用超声波识别障碍物,并使用直流电机控制麦克纳姆轮进行避障行走,图像识别装置在小车行进过程中寻找垃圾。图像识别装置以K210芯片为主控,小车前方的摄像头将图像传给芯片后,通过卷积神经网络的计算,识别出图像中的垃圾,按照可回收物、不可回收物、其他垃圾的分类标准进行类别判断。在图像识别装置得出数据后,通过串口通信传送给主控板Arduino。主控板再通过舵机控制小车的铲子将垃圾铲起,并将垃圾放至小车上相应类别的垃圾桶中。同时,通过红外模块,实时测量垃圾桶是否已满,如果垃圾桶已满,则发一个信号给主控板,此时,语音模块发出语音提示“垃圾已满”。智能垃圾处理小车顺应时代发展,可轻松实现垃圾分类,同时又将垃圾分类与小车结合在一起,实现动态的垃圾分类,解决室内卫生问题。具体的系统设计方案如图1所示。
2 系统硬件设计
基于设计方案,对主要组成部分进行详细设计。
2.1 Arduino Mega 2560主控板
Arduino Mega 2560作为主控板,通过收集超声波测距模块和光电传感器的信息对小车周围环境情况进行判断,实现小车的自主运动与避障。同时判断k210通过串口传输的数据,对地面上的垃圾进行分类处理,再通过串口发送垃圾种类给语音识别模块。此外,小车上的临时垃圾桶装满后,Arduino发送信号给工作人员进行下一步的处理。
2.2 K210芯片
K210芯片作为图像识别装置的主控,拥有1TOPS的算力,在卷积神经网络计算方面有一定的优势,所搭载的SD上存放有基于YOLO目标检测算法训练的图像识别模型。当接收到摄像头OV2640传来的图像时,利用卷积神经网络及已经训练好的模型进行计算,分析图像中是否有垃圾,并通过串口将结果实时传送至主控Arduino,同时将垃圾位置框出,连同垃圾种类一起在LCD屏中显示出来。当摄像头传过来的图片中未显示有垃圾时,则不发送数据。
2.3 LCD显示屏(ST7789)顯示识别情况
运用高清全彩IPS LCD实时显示图像。如果图像中存在垃圾时,在屏幕中显示垃圾所在的区域及垃圾类别,可以验证能否正确寻找图像中的垃圾以及所识别的图像垃圾类别是否正确。
2.4 超声波测距和光电开关组成的避障模块
小车的头部是避障最为关键的部位,在车头中心位置加装超声波传感器,两侧对称放置光电传感器,尽可能扩大环境探测范围。此外,车体两侧也是避障的关键点。在避障过程中,它们的作用是让车身与两侧的障碍物保持安全距离。通过超声波测距模块和光电传感器对周围环境做出判断,与构建好的控制规则进行比较,在代码中设置不同环境下小车的运动动作,当超声波返回的数值小于所设置的距离或光电开关置于“0”时,小车改变当前的运动状态。与红外测距相比,光电开关传感器抗干扰能力强,频率响应快,检测准确度高,适用于不同的室内光线,克服小车使用场景的局限性。
2.5 TB6612FNG电机驱动
TB6612FNG是一款新型电机驱动器件,具有集成度高、输出能力强、能耗低等优点。通过改变Arduino的引脚输入对应码值和PWM输入数值,即可控制电机正反转和转速,实现相应的动作,有效控制小车运动。
2.6 摄像头OV2640捕捉图像
这款摄像头拥有高灵敏度,适合低照度应用,可以适配K210,且拥有200万像素,能够清晰地获取图像,提高图像识别的准确率。
2.7 舵机组合模块
舵机的转动由PWM脉冲控制,通过改变输入信号脉冲宽度的方式来改变舵机转动的角度,能够很精确地控制电机的转动,从而实现精确的定位。在实现垃圾的抓取和倒置时,我们选用舵机MG996R设计两个可自由活动的垃圾铲子抓取垃圾,使用舵机SG90控制垃圾桶的翻转。
2.8 Q8900-16P语音模块
能够灵活有效地更换存储的语音内容,使得产品研发和生产变得简单便捷,同时价格适中,非常适合应用在实际生活中。将语音模块和喇叭安装在小车上,实现在不同情况下播报不同的语音,让使用者可随时了解智能垃圾小车的运动状态。
3 系统软件设计
3.1 系统主控程序
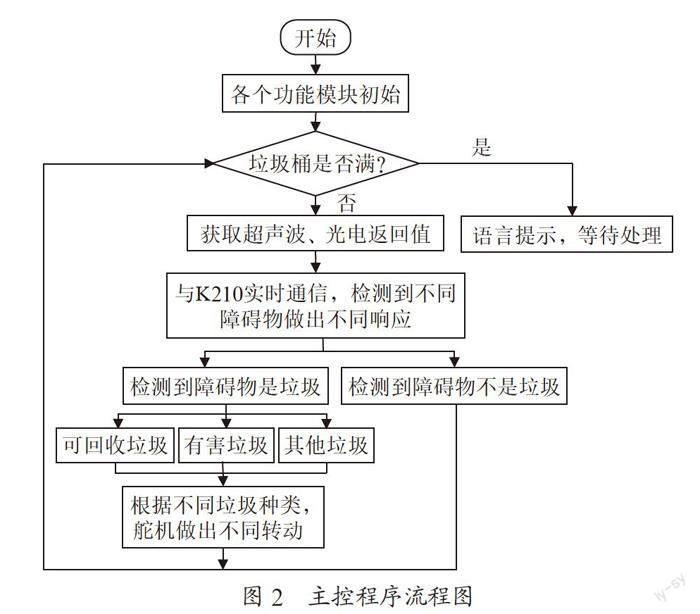
如图2所示为系统主控流程图,先初始化各个功能模块,实时检测小车周围的环境情况,根据传感器返回的数据控制小车执行避障程序,从而实现小车的自主运动。在小车运动过程中,同时使用摄像头检测是否有垃圾,若有垃圾,K210经过卷积神经网络分类处理,同时通过串口发送数据给主控板,主控板控制舵机转动,抓取垃圾放入不同的垃圾桶。当垃圾桶中的垃圾装满时,会发出语音提醒工作人员进行处理。
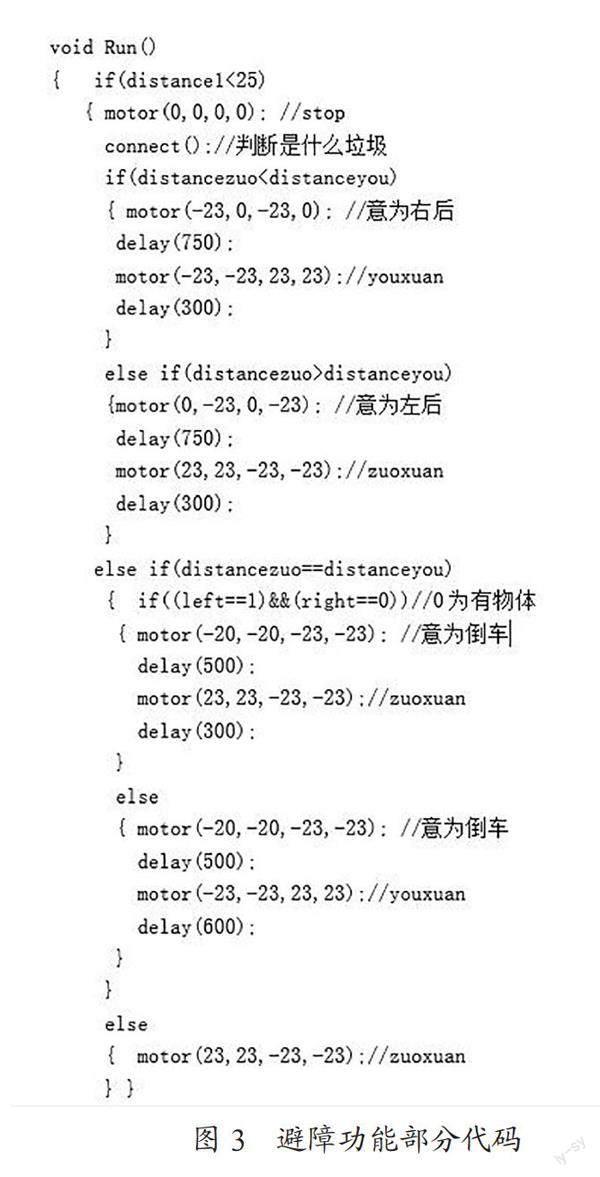
避障功能部分代码如图3所示。
3.2 图像识别装置(K210)程序
如图4所示为图像识别装置(K210)程序框图,先初始化摄像头和屏幕,打开SD卡里的模型文件和anchors、lable文件,设置串口通信的引脚,然后由K210芯片处理摄像头传来的图片,并将处理结果通过串口传出去,同时将垃圾框出,连同处理结果一起显示在LCD屏上。
3.3 YOLO目标检测算法
YOLO是一种国外开源的目标检测算法,YOLO本质上是一个回归问题,图像作为神经网络结构的输入,输出为边界框的位置及其所属的类别。
YOLOv2是其中一个版本,利用K-means聚类方法获得更好的Anchor模板,同时结合图像细粒度特征,将浅层特征与深层特征相关联,有利于小目标的检测。但YOLOv2算法相比之前的系列算法,提高了定位准确性,并且基于region proposal的方法相比召回率有所提高,因此选用YOLOv2算法实现垃圾分类。
4 系统测试
为了让图像识别更加精准,计算更加准确,采用YOLO目标检测算法进行模型训练,同时选择拥有高算力的K210芯片进行卷积网络计算。此外,小车搭载大扭力的舵机以及3D打印的铲子,保证铲子拥有较高的载重能力同时能够准确地铲起垃圾。在进行物体垃圾分类识别时,除了芯片算力的问题,还有SD卡中训练的模型准确度问题。这就涉及训练集的大小和精度,以及模型是否适配K210芯片的问题。经过一系列的尝试,最终选择本地训练的模式。关于小车避障部分,在实现过程中也遇到了一些困难。小车综合采用超声波及光电实现避障功能,传感器在小车上并不能完全覆盖每一个角度,因此在一些比较极端的环境下,小车与障碍物存在碰撞情况,因此在实现过程中我们在调整传感器角度的同时,后续还会安装防撞导向挡板,使小车的避障功能更加完善。除此之外,我们在测试过程中发现,小车在遇到三面都是障碍物时可能会出现循环移动的路线,这是因为小车左右遇到障碍物时的旋转角度一致。当障碍物左右距离相等的时候,小车会不断地左右转动,我们的解决方法是稍微调整小车的转动角度,同时向斜后方倒车,让左右两边的距离差增大,后续我们还会继续根据车身来调整车速和转动方向。图5与图6展示了小车在行进过程中遇到电池垃圾,经过分类识别后,用铲子铲起电池垃圾,然后将其放入对应的分类垃圾桶中。
4.1 不同环境下的小车避障测试
将小车放入不同环境中进行测试,检测小车能否成功避障,记录小车在不同环境下的测试结果。障碍物出现在车头前方a,出现在车头左方b,出现在车头右方c,出现在车头左右方d,出现在车头的前方、左方e,出现在车头前方、右方f,出现在车头前方、左右方g。试验结果如表1所示,小车能够在不同环境中实现避障功能。
4.2 垃圾识别正确率的测试
训练模型中将垃圾分为三类,分别是有害垃圾、可回收垃圾和其他垃圾。进行了10次试验,其中有9次能正确识别出垃圾,成功率为90%。另外在对不同类别垃圾进行分类识别的实验中,有害垃圾的分类准确率低于可回收垃圾及其他垃圾的分类准确率,如表2所示。试验结果表明,小车能够正确识别垃圾,但在对有害垃圾的识别分类上还要提高准确率。
4.3 垃圾拾取成功率測试
对小车铲垃圾动作准确性进行实验,进行了10次实验,成功率达到100%,试验结果表明,小车能够正常铲起垃圾。
5 结 论
随着人们对环境清洁需求的日益增加,垃圾分类正在融入人们的生活,为此设计和制作一款基于图像识别的智能垃圾小车。摒弃了市面上固定垃圾桶的垃圾分类方法,采用装载了能让小车横向行走的麦克纳姆轮的小车巡逻的方法,避免了垃圾桶旁边堆放垃圾无人清扫的情况,提高了清洁的灵活性,节省了人力成本,更好地保证了环境的干净整洁。小车采取图像识别垃圾自动分类,避免了依赖人工进行垃圾分类的弊端,让小车清洁、垃圾分类的一系列流程能够顺利、高效地进行,让小车的使用更智能、更简便,门槛更低。
参考文献:
[1] 彭超.数字乡村战略推进的逻辑 [J].人民论坛,2019(33):72-73.
[2] 范攀峰,李露露.基于Smart3D的低空无人机倾斜摄影实景三维建模研究 [J].测绘通报,2017(S2):77-81.
[3] 李加忠,程兴勇,郭湧,等.三维实景模型在景观设计中的应用探索——以金塔公园为例 [J].中国园林,2017,33(10):24-28.
[4] 康荔,蔡磊,张鑫,等.倾斜摄影技术在农村宅基地权籍调查测量中的应用研究 [J].测绘与空间地理信息,2019,42(11):236-238.
[5] 李智广.基于WebGIS的乡村管理平台设计与研究 [J].中国建设信息化,2020(10):55-57.
[6] 乔贤哲,张超,杨建宇,等.高分辨率遥感影像中农田灌溉设施的提取 [J].测绘通报,2012(S1):372-374.
[7] 舒小林,刘东强,齐培潇,等.中国城镇化与旅游业发展的动态关系研究——基于VAR模型的分析 [J].经济问题探索,2014(11):122-129.
作者简介:吴洪艳(1970—),女,汉族,辽宁义县人,副教授,博士,研究方向:智能控制。
收稿日期:2022-10-10
基金项目:岭南师范学院教学质量与教学改革工程建设项目(岭师教务〔2020〕81号);广东省高职教育改革研究与实践项目(GDJG2021368);岭南师范学院—北京三清互联科技有限公司实践教学基地(岭师教务〔2021〕165号)