疫情环境下用于物资配送的送货无人机设计
2023-06-21张一鸣


疫情环境下用于物资配送的送货无人机设计
张一鸣
(江南大学,江苏 无锡 214122)
摘 要:2020年新冠疫情暴发,对无接触配送提出了更高的要求。基于无人机小巧敏捷的特点,设计了一款可以应用在居民区的送货无人机,系统围绕TM4C124GH6PM及其擴展版展开,搭载了激光雷达、TOFSense激光测距传感器、机载计算机树莓派、OPENMV等模块,采用PID调节和图像处理等算法,解析无人机姿态和位置信息,自动识别物资的样本特征,实现自动送货投递功能,减少疫情传播风险,通用性强,拥有广阔的发展前景。
关键词:送货无人机;OpenMV;图像识别
中图分类号:TP242 文献标识码:A 文章编号:2096-4706(2023)01-0142-03
Design of Delivery UAV for Material Distribution under the Environment of Epidemic Situation
ZHANG Yiming
(Jiangnan University, Wuxi 214122, China)
Abstract: The outbreak of COVID-19 epidemic situation in 2020 puts forward higher requirements for contactless distribution. Based on the characteristics of small and agile of the UAV, this paper designs a type of delivery UAV can be applied in residential areas. The system extends around TM4C124GH6PM and its extension, carries the laser radar, TOFSense laser ranging sensor, airborne computer raspberry pie, OPENMV and other modules, and uses PID adjustment and image processing algorithm, analyzes the attitude and location information of UAV, automatically recognizes the material sample characteristics. It realizes automatic delivery function, reduces the risk of epidemic situation spread, and it has strong versatility and broad prospects for development.
Keywords: delivery UAV; OpenMV; image recognition
0 引 言
2020年新冠疫情爆发,社区居民的物资配送问题面临巨大挑战。居民下楼自取或相关工作人员上门配送等传统配送方式,均会增加交叉感染的风险,且将使社区工作人员的工作量剧增,降低配送效率,造成人员不足等问题。送货无人机可以解决这一问题,首先,相较于智能小车,无人机在“二维”基础上提升到“三维”,可以直接将物资送至窗户外,使居民足不出户就可以取到物资,真正实现了“无接触配送”,降低传染风险。而且无人机可以提升工作效率,减少了一些重复且机械性的工作,如工作人员上下楼,降低劳动成本。除此以外,当不同种类的物资需配送到不同指定居民时,可以在送货无人机上搭载视觉模块,识别物资的特征信息,如二维码、颜色和形状,从而实现精准自动配送,减少了因人工疏忽而造成的重复劳动,进一步提高工作效率。
1 系统总体设计
本系统由信息采集系统、飞行姿态控制、飞行高度控制和视觉模块组成。系统以TI LaunchPad核心板与扩展板为核心,解析飞控数据,实现无人机的姿态自稳,同时主板上的按键可以作为外接输入,输入不同投放点的坐标信息,使用TOFSense激光测距对地传感器测量飞行高度,使用OPENMV视觉模块识别物资特征,将数据发至飞控,从而实现不同物资的点对点配送,使用激光雷达进行SLAM建图,测量无人机与建筑物的水平距离,得到无人机位置信息,使用步进电机控制吊舱上下移动,从而实现物资配送。整个系统可以实现定高飞行和定点飞行,精准投放物资,此外,可以使用按键输入不同建筑物的位置信息,从而可直接适应不同居民区,灵活性好。
当送货无人机执行送货任务时,需首先通过按键,输入居民区每栋楼的位置坐标信息,接着用安装在底部的视觉模块识别物资特征,起飞无人机,无人机先飞至目标高度,后飞至指定位置,当无人机在指定点上方稳定悬停,启动电机控制吊舱向下移动,将货物放置在平台上后,控制吊舱向上移动,收回吊舱,完成送货任务,再原路返回至起飞点并自动降落。
2 系统硬件组成
硬件系统组成如图1所示。主要包括飞控系统、动力系统和视觉识别系统。飞控系统是送货无人机的核心部分,围绕TM4C124GH6PM及其扩展版展开,搭载了TOFSense激光测距对地传感器、激光雷达、OPENMV、机载计算机树莓派和步进电机。飞控采集传感器模块传来的数据,处理并返回飞控的姿态和位置等信息,根据PID等控制算法计算出期望值传给动力系统,从而控制定高飞行和定点飞行。注意到居民楼的二维平面通常是矩形或其他形状,且在不同高度的环境差异不会太大,所以不会影响激光雷达SLAM建图定位的精准度。激光雷达建模数据由树莓派处理后传给飞控,从而获得飞控位置信息。动力系统由电机、电调、电池、旋翼和保护罩组成。主板上的PWM串口发送的信号通过电调提供三相交流电,从而驱动交流电机,以带动飞机旋翼的旋转。视觉识别系统即OPENMV模块,它以STM32F427CPU为核心,集成OV7725摄像头芯片,可使用Python进行编程。
3 软件系统设计
3.1 飞控部分
飞机的稳态飞行包括姿态控制和高度控制。通过PID控制算法调整无人机的横滚角和俯仰角,从而改变无人机水平方向加速度,通过调整偏航角来改变机头方向,来实现无人机位置和速度的改变,以保证飞机可以实现悬停或定点飞行等飞行动作。高度控制利用无人机速度控制来控制无人机上下移动,改变无人机的飞行高度。编写程序时,将整个送货过程分为不同子任务,当上一个子任务完成后才进入下一个子任务,使用计数器自加来实现子任务的跳转。
3.2 视觉部分
视觉部分的代码分为有无条形码两种情况。
当物资上有条形码时,使用遥控器调整无人机SDK模式为条形码模式,此时OPENMV运行的程序为识别条形码任务后,获取条形码上的数值信息,如坐标位置或楼栋号,将获取数据打包给飞控,从而实现不同送货点的投递,此种方法的准确性更高。
当物资上没有条形码时,使用遥控器调整无人机SDK模式为颜色形状模式,此时OPENMV运行的程序为识别颜色和形状,在遍历所有像素点后,根据阈值区分出不同的色块,设定第一优先级为色块颜色识别,使用LAB颜色空间调节阈值,成功识别色块颜色后,设定第二优先级为色块形状识别,使用占空比来判断形状,最后将识别成功的颜色形状数据打包传给飞控,从而实现不同送货点的投递。
4 系统调试
4.1 场地设计
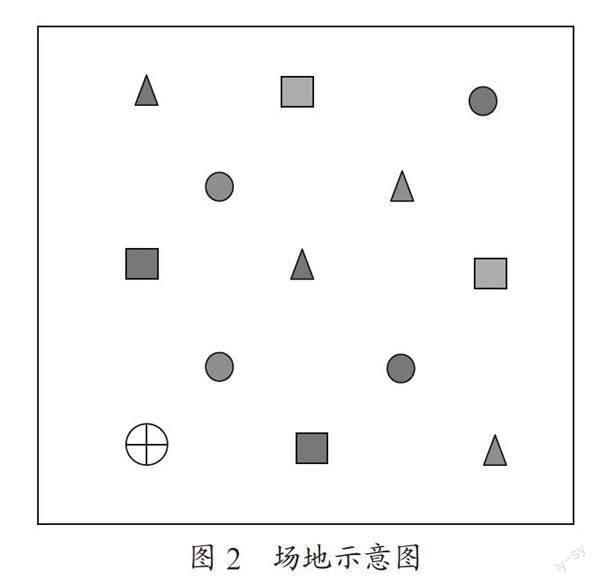
由于场地有限,将送货场景调整在室内,在地面上设置十二个不同的投递点位置,设计6种不同样板来代表物资的特征,分别是红色三角形、红色矩形、红色圆形、蓝色三角形、蓝色矩形和蓝色圆形,用50克砝码模拟物资,将其用细绳系在步进电机上,砝码的上下运动表示送货过程。场地示意图如图2所示,无人机实物图如图3所示。
4.2 无人机的调试
调试时,为防止代码逻辑错误造成的炸机问题,先不装旋翼,手持无人机模拟无人机飞行过程,在每一个子任务完成后添加激光打点的动作,通过观察是否有激光打点来判断子任务是否完成。当判断逻辑无错误后,再装上旋翼进行无人机的飞行测试。此种方法可以有效避免一些不必要的因代码逻辑问题而造成的炸机。
调试过程中主要发现了三个问题。
首先是在投递点悬停送货时,无人机会出现轻微不稳摇晃,此种摇晃虽然不会对无人机的稳定飞行产生很大的影响,但因物资是由砝码固定在无人机上,且细绳的长度较长,当细绳放下,进行物资投递时,悬停无人机的轻微摇晃会使细绳的摇晃角度较大,导致物资放置位置与期望点的差大于15 cm,经过多次测试,发现摇晃问题与判断阈值和悬停时间相关。判断阈值是判断无人机是否到达投递点的条件,即当无人机的实时位置与投递点的距离小于阈值时,认为无人机已经到达投递点。测试初期我们设置此阈值为5 cm,发现无人机会悬停较长时间,轻微摇晃调整来到达距投递点5 cm范围内的位置,从而造成晃动,改变阈值并多次测试后,发现设置阈值为8 cm时,无人机不会出现晃动,且悬停时间短,所以最终采用8 cm为判断阈值。同时,悬停时间也会影响稳定度,当无人机首次到达指定位置时,会出现轻微晃动,当悬停时间过长,同样也会出现晃动。经过多次测试,发现到达指定位置后悬停两秒,此时无人机是最稳定的,所以设置此时放下吊舱,从而完成送货任务。
其次是在返回至原点后降落的过程会出现漂移,导致最终落地點与起飞点的距离相差较大。猜想造成此现象的原因可能为飞行高度平面的环境与地面环境相差过大,导致激光雷达定位不准,所以我们直接采用速度控制下降的方法,即在指定高度平面到达出发点上方后,就直接控制速度垂直降落,不使用激光雷达,且下降速度设置为-35 cm/s。
无人机在降落后会出现弹跳现象,考虑是否因降落速度过快而导致弹跳。在设置下降速度为-25 cm/s后,发现此下降速度会使飞机出现严重漂移。之后设置下降速度为-30 cm/s,发现不会出现漂移问题,但偶尔会出现小幅度弹跳。接着尝试设置将下降过程分为两段,当无人机高度大于20 cm时,下降速度设为-30 cm/s,高度小于20 cm时,下降速度设为-25 cm/s,发现无人机第一段下降稳定,第二段下降还是会出现严重漂移。所以最后决定将下降速度设为-30 cm/s,此时偶尔出现的小幅度弹跳现象不会对送货无人机的安全性和准确性产生影响,可忽略不计。
4.3 视觉部分的调试
4.3.1 OPENCV
由于无人机上搭载了树莓派,且OPENCV功能强大,故首先考虑使用树莓派进行视觉识别。使用摄像头拍摄视频,处理其捕获的帧,通过识别颜色阈值、过滤阈值外的部分、腐蚀图像、膨胀处理、边缘识别等步骤来识别色块颜色,再通过灰度化图片,进行二值化来凸显轮廓,计算轮廓角点来识别形状,三个角点为三角形,四个角点为矩形,十个或十个以上角点为圆形。经测试,此种方法精确度很高,但是刷新帧率极低,很难满足实时识别的要求,如图4所示,故不使用OPENCV。
4.3.2 OPENMV
利用OPENMV IDE进行调试,颜色的识别较容易且准确,但形状的判断由于现实中光线和背景环境的影响,占空比需调整。经过多次测试后,得出0.855,0.65,0.40这三个数值,当占空比大于0.855时判断为矩形,占空比小于0.855但大于0.65时判断为三角形,占空比小于0.65但大于0.40时判断为圆形,其中,由于圆形与矩形在判断时容易混淆,故在占空比判断圆形的基础上,再次利用draw_circls()函数来识别圆形。为防止偶然的误判结果传给飞控导致整个飞行结果的错误,分别给六个形状设定计数器,每识别到相应特征则计数器加一,让六个计数器进行计数竞争,当计数器首先达到500时,则认为结果是此计数器代表的物资特征,并将此结果传给飞控,经过多次测试,发现圆形相较于其他形状来更说不易识别,且由于外界环境和光线的影响,红色比蓝色更不易识别,于是将红色圆形的识别成功阈值从500改为100,将蓝色圆形识别成功阈值从500改为200,可以在保证识别准确度的情况下提高识别速度,如图5所示。
5 结 论
本文设计了一款可以在居民区运输物资的送货无人机,适用于疫情的大背景下对于无接触送货的要求,降低了疫情传播风险,同时,也可以应用于日常生活中快递外卖的运输,完成新零售背景下“最后一公里”的挑战,有着较好的发展前景,且在室内模拟外部的环境下均可以实现设想内容。
由于室内环境与室外环境有一定差别,故需做出一些改动来适应室外环境。如激光雷达测距的阈值有限,不能满足室外对于整个居民区的SLAM建图,所以可以考虑使用GPS和激光雷达相结合的方式,使用GPS进行初步定位后,飞至投递点,后使用激光雷达测距,调整无人机与建筑物的距离,从而实现精准投放。为提高准确性,还可以在使用底部OPENMV进行色块追踪,进一步调整无人机的位置,从而控制精度。同时,TOFSense激光测距对地传感器的阈值只有12 m,只满足室内测试的要求,在户外测试的时候需要更改为其他阈值更大的测距传感器。
参考文献:
[1] 张会云,张琳琳.后疫情时代的“无接触配送”服务 [J].综合运输,2021,43(8):102-106.
[2] 马晓琳,周弘斌,黄福龙.基于OpenMV的四旋翼无人机目标跟踪系统设计与实现 [J].电子测试,2022,36(2):20-21+54.
[3] 王丹丹,杜雪,李宏杰.基于植保无人机近地面施药技术的研究 [J].南方农机,2022,53(13):7-11+25.
[4] 张杰,李妍峰.疫情环境下生鲜配送的选址-路径问题 [J/OL].中国管理科学:1-12[2022-09-09].DOI:10.16381/j.cnki.issn1003-207x.2022.0575.
[5] 郭栋,佀秀杰,吴俊吉.无接触配送机器人设计与仿真 [J].电子世界,2021(23):27-28.
作者简介:张一鸣(2000.04—),女,汉族,河北唐山人,本科在读,研究方向:无人机技术。
收稿日期:2022-09-19
