基于机器视觉的水下视觉成像分析及优化
2023-06-21彭湃张禹
彭湃 张禹
摘要:海洋是地球上重要的资源宝库之一,在人类历史中人们对海洋资源的利用在不断深化。随着现代技术的发展,水下机器人可以代替人类对海洋进行探索,其中水下摄像机是水下机器人执行水下任务必不可少的工具。根据水下视觉环境的分析,提出了摄像机的镜头畸变问题和水下噪声干扰问题,并分别使用张正友标定法和图像滤波方法来改善水下视觉图像质量。
关键词:水下机器人;机器视觉;摄像机标定方法;图像降噪
中图分类号:TP242 文献标志码:A 文章编号:1671-0797(2023)12-0039-03
DOI:10.19514/j.cnki.cn32-1628/tm.2023.12.011
0 引言
水下机器人对水下环境的视觉感知主要依靠摄像机设备,即通过摄像机拍摄水下图像,根据图像信息,判断水下目标物的距离和位置[1]。一些水下机器人如水下机械臂作业主要依靠近距离环境信息,对水下环境感知的时效性和精度要求较高,而水下摄像机能更好地满足水下机器人在水中的近距离、高精度工作要求。所以,搭建水下机器人的视觉系统时大多会使用专用的防水摄像机或经防水处理后的摄像机。
水下环境复杂多变,根据相机在水中的成像原理和水中环境进行分析,总结出两个问题,分别为镜头折射畸变和水下噪声干扰[2]。其中,折射畸变问题会降低水下目标位置测量的精度,同时还会缩减摄像机的有效视野面积;而水下噪声干扰会影响图像细节信息,降低图像质量。
1 水下摄像机的镜头折射畸变
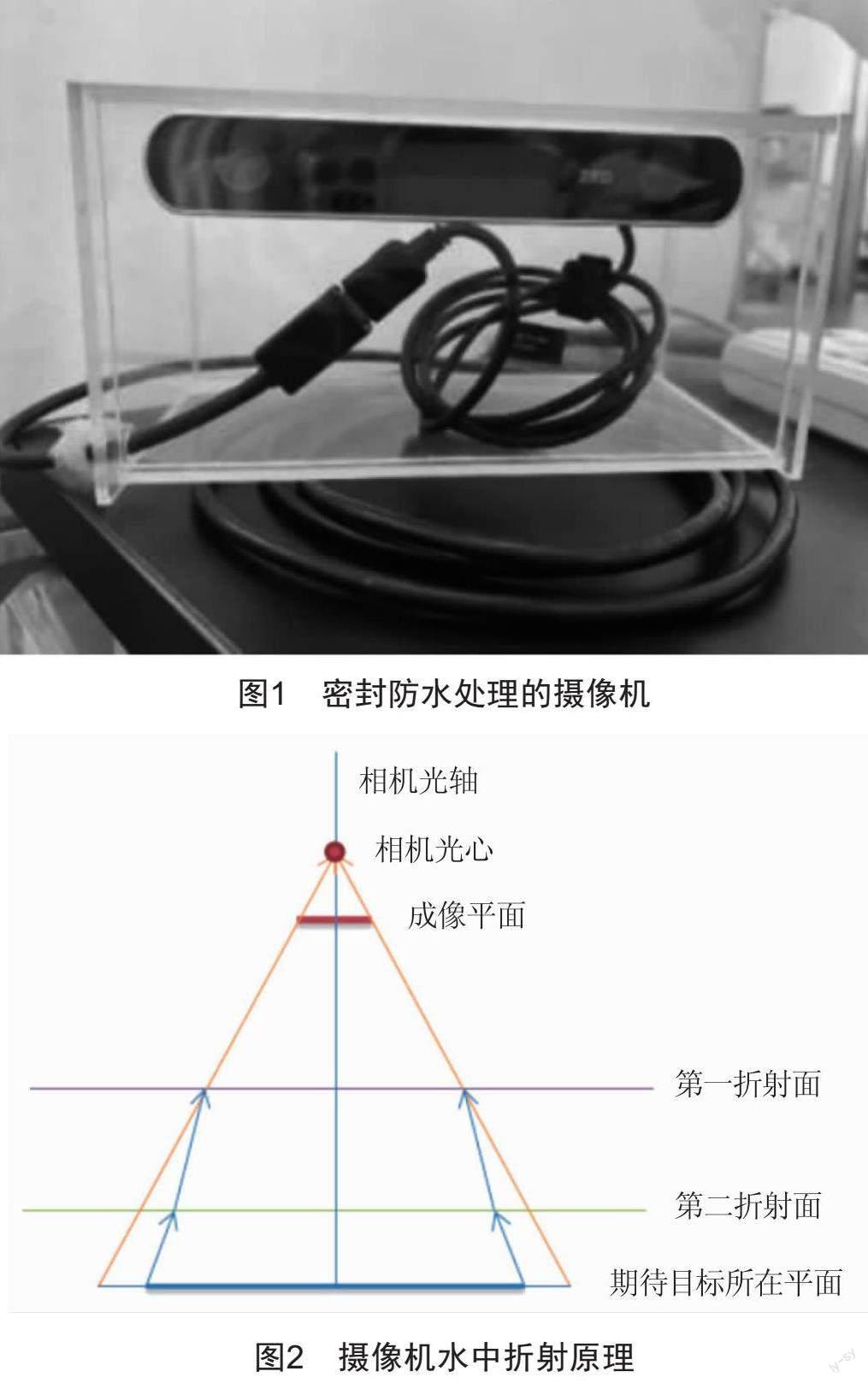
本文研究选用放置在防水舱中的光学摄像机采集水下图像,如图1所示。由于水中的光线穿过防水材料,再经过防水舱中的空气,最后射入镜头,这一过程中光线发生了两次折射,造成摄像机拍摄的目标图像发生形变,如图2所示。这种现象就是折射畸变,如果依旧使用陆地上的相机模型会导致严重的测量误差。镜头折射畸变问题不但会降低水下目标物的测量精度,而且还会减小摄像机的有效视野面积,对水下目标物的测量和定位等工作产生不良影响。
2 摄像机的镜头畸变
在摄像机出厂加工过程中,受现代加工技术水平限制,加工出的镜头跟理想化模型会有所偏差,产生镜头畸变,包括径向畸变、切向畸变和薄棱镜畸变[3],其中径向畸变对视觉测量的准确度影响较大。
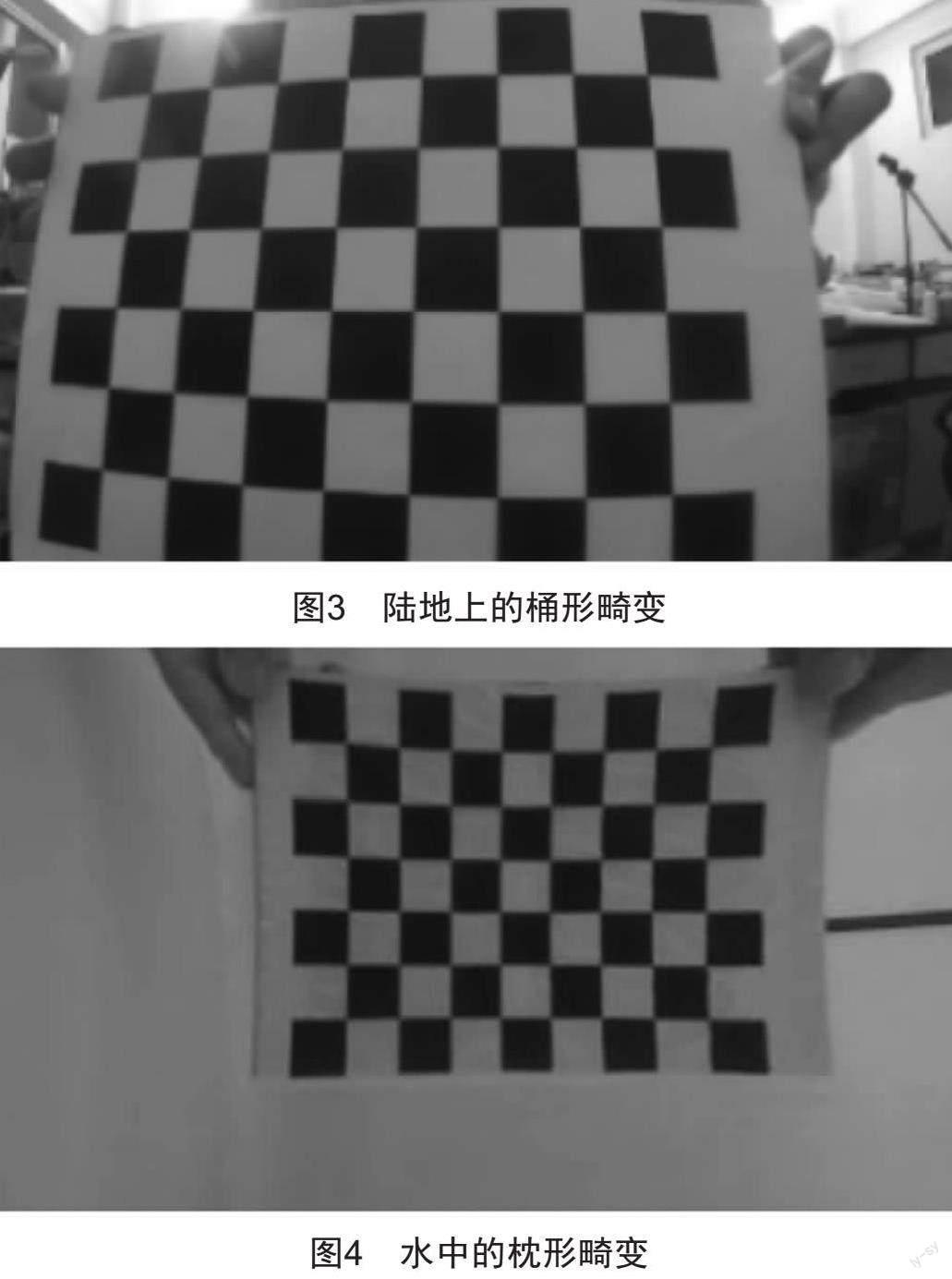
实践中摄像机镜头的径向曲率会发生变化,导致镜头产生径向畸变。随着径向曲率的变化,图像中的点会发生径向移动,使图像发生形变。正径向形变会导致镜头成像平面上的点坐标向远离成像平面中心移动,形成枕形畸变;负径向形变会导致镜头成像平面上的点坐标向靠近成像平面方向移动,形成桶形畸变。
切向畸变一般是摄像机镜头装配误差所引起的,现实生产中摄像机的光学镜头安装时镜头光轴不可能完全和其他光学系统共线,从而导致镜头中心点的偏移。
镜头制造误差和成像系统元器件制造误差,会使得镜头产生薄棱镜畸变,导致图像产生形变,但这种畸变产生的影响较小,在视觉精度要求不高的環境中可以忽略不计。
3 水下摄像机的标定方法
根据原理不同,摄像机标定方法也不同。例如传统的标定方法是根据确定的参照物,使用摄像机对拍摄的视觉信息进行数学计算,虽然其标定数据的精度较高,但过程过于烦琐。自主标定无须参照物,可根据摄像机拍摄的图像得到摄像机的内外参数[3],该方法灵活性高,可应用在不同视角场景中,缺点是精度过低。摄像机依靠主动视觉的标定是依靠摄像机的运动信息进行标定任务,该方法精度和准确度都很高,但成本昂贵,并且在一些特定视觉场景无法适用。
本摄像机标定实验使用张正友网格标定方法,即从不同方位角度拍摄特定的网格标定板,不需要知道摄像机的运动信息参数,标定操作过程简单,并且精确度也高。
4 水下摄像机的标定实验及分析
实验分别开展陆地和水下摄像机标定工作,实验完成后对比并分析两种环境中得到的摄像机数据参数。
实验工具使用网格为9×7的矩形标定板[4]和ROS功能包,标定流程和注意事项如下:
1)启动标定程序,拍摄网格标定板与摄像机的图像,应尽量选择不同角度拍摄;
2)拍摄图像选择20张左右,图幅数量较少会导致摄像机标定精度不高,图幅数量过多会加大摄像机的标定计算量;
3)避免光线反射影响网格标定板的角点检测;
4)标定过程中确保网格标定板占据摄像机大部分视野,保证角点检测的准确性。
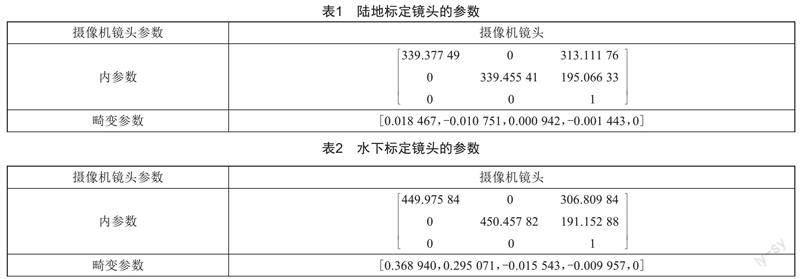
陆地标定实验结束后,将摄像机放到水中进行标定实验,水下实验环境为长2 m、宽1.3 m、高1 m的水池,水深为0.8 m。水中的标定流程与陆地标定流程基本相似,与陆地标定实验有所不同的是,水中的视觉环境较弱,标定板距离摄像机较远会导致标定程序无法检测到网格标定板的角点。所以,应尽量使得标定板完全充满摄像机视野,以确保水下标定实验的准确性。陆地标定的镜头参数如表1所示,水下标定的镜头参数如表2所示。
从陆地标定实验和水下标定实验的结果来看,不同环境中摄像机的参数有一定差异。从呈现的图像来看,在陆地上摄像机镜头畸变类型为桶形畸变(图3),在水中摄像机畸变类型为枕形畸变(图4)。分析两次实验得到的数据,相比陆地上的标定结果,水下的标定内参数产生了一定变化,但保持在容许范围内。而不同介质中光的折射率不同,在水中摄像机的畸变参数有所增大,对水下测量误差影响较大。
5 水下图像滤波
受到摄像机硬件和水下噪声的影响,图像会出现一些噪点。噪点的干扰会影响到图像细节信息,对机器视觉的图像处理如特征点提取、目标物识别等工作带来不良影响。图像处理中的滤波方法可以避免噪声干扰对图像质量的影响,均值滤波、高斯滤波、中值滤波等是最为广泛的图像滤波降噪方法,最新又提出了双边滤波方法,其效果尤为不错。
均值滤波的核心思想就是取均值,求取数字图像中像素数值的平均数值,将得到的平均数值作为滤波器中心的像素值[4]。均值滤波的优点是可以均匀地处理视觉图像上的噪点,缺点是均值滤波器去除大部分图像噪点后,会使图像模糊。
高斯滤波的原理是采用高斯滤波器,在滤波器范围内考虑图像像素坐标和中心坐标距离的影响,其均值呈高斯分布,计算像素的数值。在图像采集过程中,拍摄视觉环境较差或摄像机元器件温度过高都会产生高斯噪声。
中值滤波的核心思想是求取数字图像的中值,然后用求得的中值数据替换掉图像中的全部数字图像数据。前面的两种滤波方法属于线性滤波算法,在对图形进行降噪的过程中也会使图片中的物体模糊,但中值滤波可以最大限度上避免模糊图像。
上述三种滤波方法原理都是考虑滤波器像素中心点和滤波器范围内的像素点做计算,这会导致图像模糊,还会造成图像边缘信息缺失。双边滤波可以最大限度地降低图像中噪点的干擾,并使图像中物体边缘信息的完整性得到保障。
未经图像滤波处理的图像如图5所示。使用上述几种滤波方法对水下图像进行滤波处理,对比几种方法滤波降噪处理后的图像效果,使用均值和高斯滤波方法的水下图像边缘信息较为模糊,图像质量较差,但中值和双边滤波方法输出的水下图像边缘信息较为清楚,没有过多地降低原始图像的质量,并且双边滤波的图像更加清晰,如图6所示。
6 结束语
随着机器人技术的不断发展,机器视觉在水下机器人领域得到了广泛应用。本文对水下视觉环境进行了分析,提出了水下镜头折射畸变问题和水下噪声干扰问题。在水中使用了张正友摄像机标定法解决镜头折射畸变问题,又使用了图像滤波的方法减少水下图像的噪点,提升了水下视觉图像质量。
[参考文献]
[1] 尚云超.基于单目视觉的水下目标识别与定位技术研究[D].哈尔滨:哈尔滨工程大学,2008.
[2] 徐玉如,庞永杰,甘永,等.智能水下机器人技术展望[J].智能系统学报,2006(1):9-16.
[3] 卜令正.基于深度强化学习的机械臂控制研究[D].徐州:中国矿业大学,2019.
[4] SIVEV S,COLEMAN J,OMERDICE,et al.Underwater manipulators:A review[J].Ocean Engineering,2018,163:431-450.
收稿日期:2023-03-06
作者简介:彭湃(1998—),男,辽宁人,硕士研究生,研究方向:基于机器视觉的水下机械臂抓取技术。
