无刷直流电动机故障模式仿真及试验验证
2023-06-21陶晓雪


摘要:无刷直流电动机具有结构简单、效率高、控制方便等优点,目前在国防军事、航空航天等领域都得到了广泛应用。随着应用环境越来越复杂多样,造成无刷直流电动机故障的因素在增加。鉴于此,深入研究了如何保证无刷直流电动机的高可靠、长时间运行。从无刷直流电动机的故障模式出发,分析了各零部件的失效机理和故障表现,基于Matlab软件平台,建立了无刷直流电动机故障仿真模型,对不同故障特征进行了仿真研究,并进行了霍尔传感器断线故障试验。由试验可知,在控制软件中加入无位置传感器控制子程序有助于提升无刷直流电动机的可靠性,延长其寿命。
关键词:无刷直流电动机;故障模式;仿真分析;故障试验
中图分类号:TM33 文献标志码:A 文章编号:1671-0797(2023)12-0020-04
DOI:10.19514/j.cnki.cn32-1628/tm.2023.12.006
0 引言
无刷直流电动机是一个由电动机本体、电子换向电路以及转子位置传感器组成的系统,其中电子换向电路由逆变电路和控制电路组成。无刷直流电动机工作的基本原理与有刷直流电动机不同,不需要电刷和换向片进行换相,而是通过转子位置传感器获得无刷直流电动机转子的位置信息,控制器通过对传送过来的转子位置信息进行处理,生成控制功率开关管通断的逻辑开关信号,控制电机的运转[1]。
驱动控制电路由功率管、电阻、电容、集成芯片等元件组成,这些元件中任何一个出现故障,整个驱动控制电路基本上就无法正常工作。也有极少数元件出现故障时整个驱动控制电路还能工作,但往往会使得电机性能下降[2]。因此,驱动控制电路是无刷直流电动机的可靠性薄弱环節[3],其中直线母线电容、IGBT对驱动控制电路可靠性的影响较大[4]。
本文从无刷直流电动机的故障仿真出发,探讨霍尔元器件故障仿真与试验验证,研究故障模式下电动机转速、相电流变化特点。
1 无刷直流电动机故障仿真模型
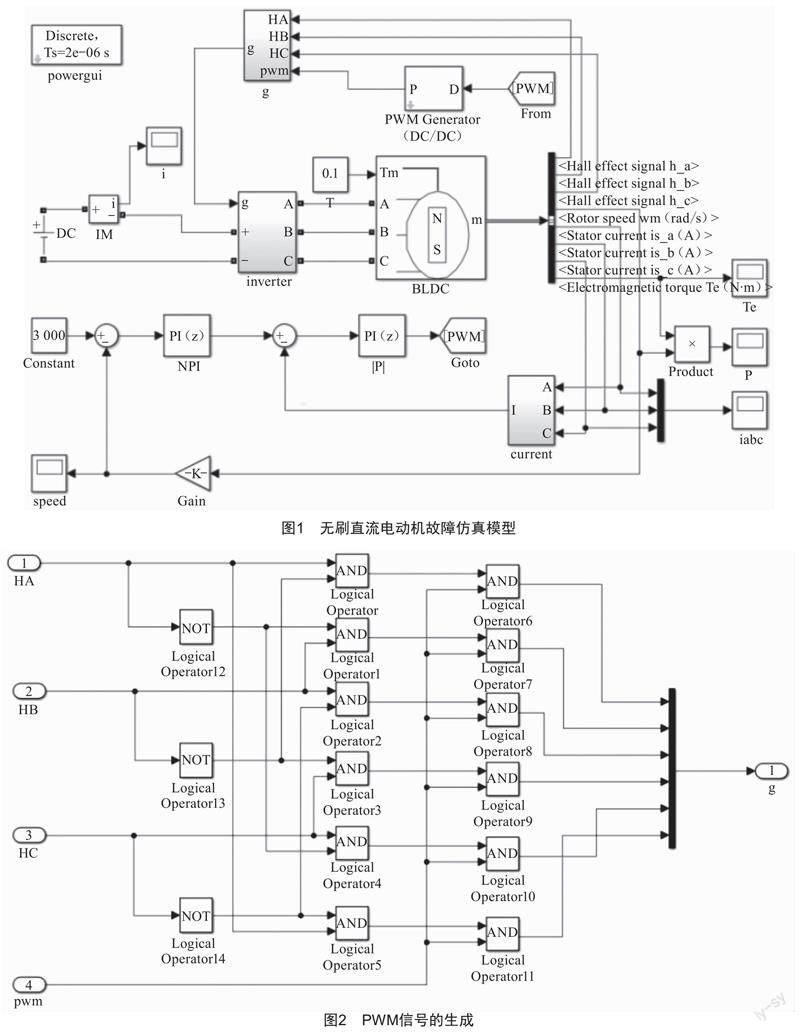
采用Matlab软件建立了无刷直流电动机故障仿真模型,如图1所示。模型包括无刷直流电动机本体模块、逆变模块、PWM信号生成模块、转速电流双闭环控制电路和信号反馈电路。
仿真过程中无刷直流电动机本体采用的参数如表1所示。逆变模块采用6个功率管组成三相逆变桥。电动机采用转速电流双闭环控制策略,电流环和转速环都由PI调节器调节。调节器的输出作为PWM生成器的输入控制PWM占空比,改变施加在绕组上的电压,反馈电路采集仿真过程所需要的转速、电流、霍尔传感器信号。
PWM信号生模块如图2所示。它根据无刷直流电动机输出的三相霍尔位置信号,以及DC/DC脉宽调制生成器输出的PWM信号进行逻辑运算,从而输出6个功率管的控制脉冲。该模块一共有4个输入信号,分别是三相霍尔位置信号(HA、HB、HC)和由PWM生成器产生的PWM信号。
仿真中无刷直流电动机采用两相导通六状态导通方式,每次使两个开关管同时导通。导通顺序为T1、T4→T1、T6→T3、T6→T3、T2→T5、T2→T5、T4,共有6种导通状态。每隔60°改变一次导通状态,每次改变仅切换一个开关管,每个开关管连续导通120°。对应的逻辑关系如表2所示。
图3和图4给出了模型中无刷直流电动机正常运行时的转速波形和三相电流波形,此时电动机运行在额定转速3 000 r/min,输出三相电流对应电动机的额定输出转矩0.1 N·m。
2 霍尔传感器故障仿真
比较常见的霍尔传感器故障为传感器与控制器的连接线断开,若有两线或三线断开,则电动机无法转动。下面只分析霍尔一相断线时的情况。图5和图6给出了A相霍尔断线的电流、转速仿真波形。在A相霍尔传感器断线后,对应的传感信号在后续各状态均为1,这样便打乱了霍尔信号与6个功率管触发脉冲之间的映射关系,绕组中的电流换相时序紊乱,使得A相始终正向不导通,而C相负向不导通,平均电磁转矩减小,转速也随之下降。在整个过程中,转速出现较大振荡。此外,相电流幅值增大2倍以上,电机烧毁的风险很高。
3 绕组开路故障试验研究
本文对所研究的无刷直流电动机进行了故障试验,试验平台如图7所示。试验平台包括无刷直流电动机本体和驱动控制器、24 V直流电源、空气开关、数字功率计、手持转速表和上位机。24 V直流电源给无刷直流电动机本体和驱动控制器供电;空气开关的通断用来模拟各种故障模式;数字功率计测量相关的电压、电流波形,并通过上位机软件在上位机上显示出来;手持转速表用来测量电动机的转速。
通过空气开关的断路,模拟了霍尔传感器的断线故障。试验中,无论霍尔传感器是断路一相信号,还是两相、三相信号,电动机均能正常运行,电流波形如图8所示,与正常运行的波形基本相同。
这是因为在无刷直流电动机的控制程序中增加了基于反电势过零检测法的无位置传感器控制子程序,当控制器检测到霍尔传感器信号不正常时,就切换到无位置传感器控制子程序进行控制。由于无刷直流电动机无位置传感器控制程序也能够实现电动机转速的有效控制,因此电动机不仅能够保持正常运行在3 000 r/min,而且电压、电流波形也没有发生变化。普通的无刷直流电动机如果发生霍尔传感器断线故障,电动机将无法正常运行,而且有可能发生烧毁电机的故障。采用基于反电势过零检测法的无位置传感器控制子程序后,霍尔传感器断线这一致命故障就可转变为轻微故障,可以大大提高无刷直流电动机的可靠性。
4 结论
本文建立了无刷直流电动机故障仿真模型,对霍尔传感器断线故障进行仿真,在整个过程中,转速出现较大振荡,此外,相电流幅值增大2倍以上,电机烧毁的风险很高。然后,搭建了无刷直流电动机故障模拟试验平台,进行了电动机霍尔传感器断线故障试验,在霍尔传感器断线故障试验中,由于控制软件中加入了无位置传感器控制子程序,霍尔传感器断线后电动机仍能正常运行,大大提高了系统的可靠性。
[参考文献]
[1] PILLAY P,KRISHNAN R.Modeling,simulation,and analysis of permanent-magnet motor drives.II.The brushless DC motor drive[J].IEEE Transac-tions on Industry Applications,1989,25(2):274-279.
[2] 王蕴辉,于宗光,孙再吉.电子元器件可靠性设计[M].北京:科学出版社,2007.
[3] 黄洪剑,林瑞光.无刷直流电机可靠性及其故障模式分析[J].电机与控制学报,2000,4(4):198-201.
[4] 胡伟,温旭辉,刘钧.电动汽车电机驱动系统可靠性模型及预计[J].电气传动,2007,37(12):7-10.
收稿日期:2023-02-20
作者简介:陶晓雪(1983—),女,贵州遵义人,工程师,主要从事无刷直流电动机、高速永磁发电机、特种电机的设计与研发工作。
