基于浮板结构的植保无人机药液晃动抑制试验
2023-06-20郑继周李雁鹏林庆明薛新宇
郑继周 李雁鹏 林庆明 薛新宇
(1.山东农业大学机械与电子工程学院, 泰安 271018; 2.山东省园艺机械与装备重点实验室, 泰安 271018;3.农业农村部南京农业机械化研究所, 南京 210014)
0 引言
外界激励作用下,部分充液容器内的液体会产生运动,称为液体晃动。液体晃动问题存在于航空、航天、航海、石化、水利、道路运输等诸多工程领域。外部激励则来自地震、波浪、载运工具姿态急剧改变等[1-4]。
抑制液体晃动的有效途径之一是减少或者消除自由液面。工程实际中,通过水平和/或竖直障板可实现这一目的[5]。为适应不同的液体深度,水平障板往往采用多层结构,而竖直障板的高度也不宜过小。多重障板增加了容器重量,减小了有效载荷。如果障板位置能够跟随液面位置而变化,则可克服这一弊端。基于这一思路,浮体结构被用于液体晃动抑制。
受啤酒表层泡沫有助于减少泼溅这一现象的启发,SAURET等[6]借助可视化手段试验研究了多种液体气泡对液面的晃动抑制效应。YU等[7]采用两块竖直放置、可随液面上下运动的浮板,试验研究了简谐滚转激励下箱体内液体晃动规律。结果证明,晃动抑制装置可以有效衰减沿纵向舱壁的浪涌,减小作用于舱壁的冲击压力。后来拓展研究至穿孔浮板[8]。ZHANG等[9]试验研究了矩形箱体中使用漂浮泡沫球的防晃效果。KULITSA等[10]提出了一种概念设计,采用可自由漂浮于液面的软金属浮毯来减少晃动。HASHEMINEJAD等[11]提出利用含有压电夹层的自由浮板抑制液体瞬时晃动的主动控制方法,有利于减少液体大幅晃动的非线性,易于实现大振幅下的线性响应。
近年来植保无人机在农业领域迅猛发展,已大量应用于水田和丘陵山地等场合的喷施作业。针对植保无人机的研究目前主要集中于路径规划[12]、旋翼流场分布[13]和作业质量评估[14]等。针对农用无人机易受药液晃动造成失稳的问题,李熙等[15]分别采用水平和竖直阻尼格栅对药箱内腔结构进行优化设计。仿真结果表明,阻尼格栅可以减小液体重心变化,还可以降低对箱体的冲击力。以六自由度运动平台为核心,于金友等[16]设计了一款试验台,用于复杂工况下植保无人机药箱内药液晃动模拟检测。AHMED等[17]研究了植保无人机药箱外形与内部障板对液体晃动的影响。
针对植保无人机喷施作业过程中,液面位置随着液体消耗而不断变化的特点,同时考虑无人机对质量的严格要求,本文提出一种轻质材料制作的弹性约束浮板装置,以期在有效抑制液体大幅晃动的同时质量增加很少。以运动模拟平台为激励源,借助自行设计的试验台架,试验研究水平激励下矩形箱体内液体晃动力的变化规律,探讨弹性约束浮板结构和约束特性抑制晃动的效果。
1 弹性约束浮板受力和运动分析
浮体结构形式多样,既有易于变形的泡沫球层或软毯[9-10],也有刚性的浮板[7-8,11]。本文采用水平放置的刚性浮板。浮板由密度较小的硬质泡沫板制成,本身不易变形。同时,植保无人机箱体尺寸相对较小。因此,浮板变形量很小,可以忽略不计。
除浮板外,弹性约束浮板装置还包括能够限制浮板沿竖直方向运动的弹性绳索或者软弹簧。绳索或者弹簧将浮板与箱体底板联系在一起,如图1所示。

图1 弹性约束浮板刚体运动示意图Fig.1 Schematic of rigid-body motion of elastically constrained floating plate
一般情况下,浮板受自身重力mg、弹性约束拉力FT1、FT2和液体力Ffx、Ffz作用。其中,液体力是浮板各处压力的合力。竖向柔性约束无法限制浮板的水平运动。如果浮板与壁面之间的距离较小,则二者还会存在碰撞与摩擦。尽管作用时间较短,但作用于浮板一端的冲击力和摩擦力也会影响浮板的运动。
不同于固定障板,弹性约束浮板可以随着液体在一定范围内运动。因此,浮板位置“相对”固定:液体深度较大,弹性绳索充分拉伸,浮板位于自由液面以下某个位置;液体深度略大于绳长,弹性绳索未充分拉伸,浮板与液面平齐;液体深度较小,约束不再起作用,浮板漂浮于液面,随液体深度变化而变化。液体力和约束力均与浮板在液体中的位置有关。显然,上述各情形下,液体力和约束力各不相同。还需要指出,与固体锚杆不同,弹性绳索不能承受压力,即浮板运动至某一位置时绳索的拉力可能为零。
外界激励作用下液体晃动时,沿水平方向不同点处的压力不同,迫使浮板绕水平轴转动。同时,弹性约束允许浮板沿竖直方向存在一定的平移。因此,浮板的运动为平移和转动的组合。浮板运动状态与作用于浮板的各种力密切相关,但反过来浮板的运动又会影响周围液体的压力分布。
总之,浮板位置与液体深度和约束变形量有关,浮板刚体运动与液体运动相互耦合,改变了自由液面以及流固耦合界面的边界条件,难以找到能够统一描述上述各情形的流体运动表达式,从而无法通过解析方式获得浮板运动及流体压力分布规律,需要借助于数值模拟或者试验进行研究。因此,本文以试验作为技术手段探索弹性约束浮板的液体晃动抑制能力。
2 试验原理与设备
2.1 箱体与弹性约束浮板设计
矩形箱体形状规则、易于制造、便于安装,在植保无人机上应用最为广泛。因此,选择矩形箱体作为研究对象。箱体由透明有机玻璃粘接而成,长、宽、高(内部尺寸)分别为230、220、400 mm,箱壁厚度为10 mm。液体深度为200 mm和300 mm时,液体体积分别为10 L和15 L,与主流多旋翼无人机药箱容量相当。面积较小而厚度较大,箱壁可视为刚性壁面,即壁面弹性变形可忽略不计。试验用水为普通自来水。为增强显示效果,添加了少量染色剂,其对液体物性的影响可以忽略。
一方面,浮板应该比较“轻”,能够漂浮于液面;另一方面,浮板还应该足够“重”,能够抑制自由液面的晃动。弹性约束浮板可以同时满足这两个看似矛盾的要求:浮板由密度较小的聚苯乙烯泡沫材料制作而成,可以提供较大浮力,保证浮板在较大液体深度范围内均漂浮于液面;连接箱体底板与浮板的弹性绳则通过限制浮板的竖向位移来抑制液体晃动。
有机玻璃质地较软,不宜过度加工。同时为减轻质量,固定装置选择市购普通粘钩。采用胶粘方式,将4个粘钩固定于箱体底板四角。弹性绳穿过浮板后,下端绳扣挂于粘钩。试验所用的约束浮板如图2所示。

图2 约束浮板实物图Fig.2 Photo of constrained floating plate
2.2 测力试验原理及设备
植保无人机的飞行姿态包括启停、转向、加速、减速等多种变化。无论是平飞过程中的加速或者减速,还是田间地头的转向或者侧飞,以及躲避电线杆、信号塔等障碍物,体现的大都是水平面内的加速度。同时,水平激励更容易激起箱体内液体晃动,并产生作用于机体的晃动力和力矩,进而影响无人机飞行姿态和施药效果,降低无人机飞行稳定性,增加飞行控制难度。因此,采用水平激励迫使液体晃动,测量晃动力,并在此基础上考察约束浮板的影响。试验原理如图3所示。
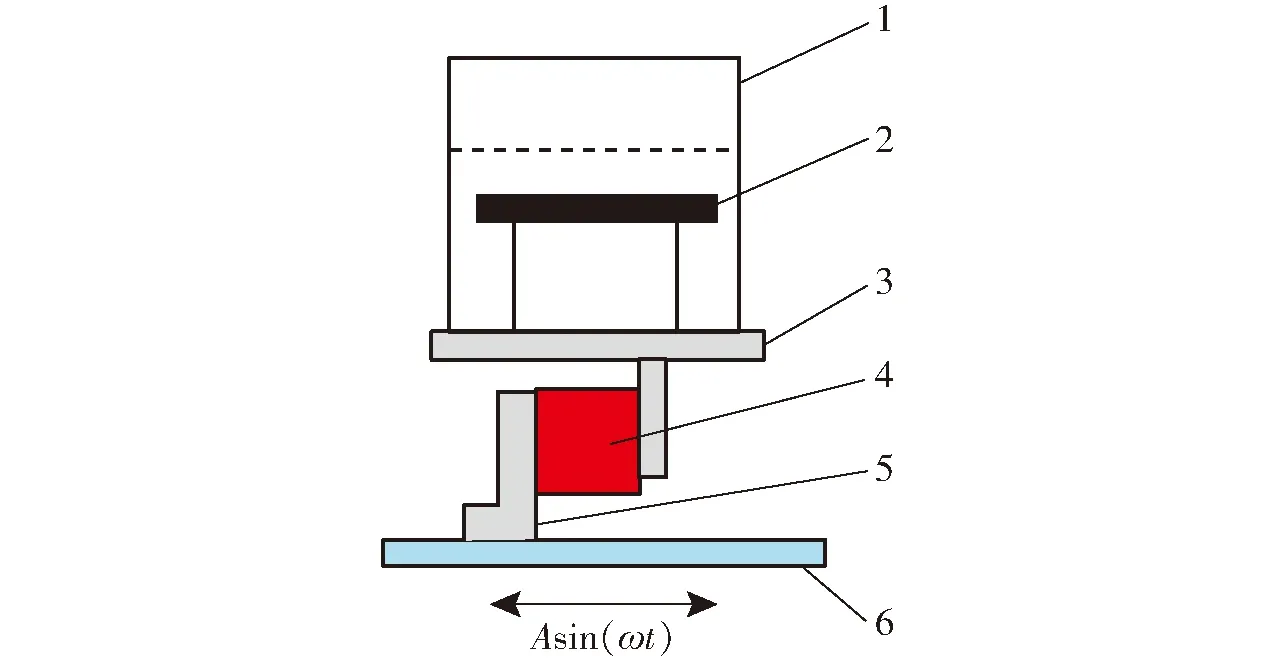
图3 试验原理图Fig.3 Schematic of test principle1.箱体 2.约束浮板 3.T形支架 4.力传感器 5.L形支架 6.运动模拟平台
L形支架的底部固定于运动模拟平台的台面。应变式力传感器的左右两端分别用螺钉固定于L形支架和T形支架的竖直部分。箱体通过螺钉和尼龙绳固定于T形支架的水平部分。弹性绳将浮板连接至箱体底板,构成约束浮板。
运动模拟平台沿水平方向往复运动,箱体运动状态随之改变。由于存在加速度,T形支架、箱体及箱内液体对力传感器产生拉力或压力。显然,该力由两部分组成:箱体和T形支架的惯性力以及液体晃动力。为了消除惯性力的影响,运动模拟平台上另外安装了一套类似的结构,只是将箱体和T形支架换成配重块。同步测量这两套装置的力,并在后续数据处理中将惯性力去除。
需要指出,上部支架采用T形结构是为了消除支架、箱体和液体三者重力的影响。合理设计箱体固定位置,使重力作用线通过传感器右边缘,则重力对测量点的力矩为零,不会产生额外的拉力或者压力。
传感器为CL-YB-3型应变式力传感器及配套的YE3817C型动态应变仪(江苏联能电子技术有限公司)。通过数据采集仪(NI公司)完成信号采集及后续处理。
3 试验方案
3.1 液体深度和激励频率
施药过程中,植保无人机箱体内液体不断消耗,液体深度随之由深到浅变化。显然,除满箱和空箱外,其它深度都存在自由液面,即液体可能发生晃动。前期试验[18]表明,当箱体形状和尺寸确定时,晃动力与液体深度密切相关。另一方面,飞行过程中,无人机姿态变化频繁且具有随机性,难以在实验室内精确复现。然而,从工程控制论角度出发,将晃动液体视为动力学系统,则箱体姿态变化为激励,液体晃动为响应。采用水平简谐激励,尽管不同于无人机真实姿态变化,但通过调节简谐激励的频率同样可以得到不同幅值的稳态液体晃动。而且,后续数据处理与机理分析也更加方便。出于上述考虑,从液体深度和激励频率两方面展开试验研究。
内壁光滑矩形箱体内液体晃动的固有频率为[19]
(1)
式中ωn——一阶固有圆频率,rad/s
g——重力加速度,m/s2
l——液体长度,mm
h——液体深度,mm
由式(1)可知,液体晃动固有频率与液体的长度、深度有关。试验所用箱体长度已经确定,因此液体晃动的固有频率只取决于液体深度。如果液体深度很小,则参与晃动的液体较少,液体晃动力也较小[20]。采用浮板装置抑制液体晃动的迫切性相对较低。因此,液体深度选择从100 mm开始,按照50 mm间隔逐渐增加,直至350 mm,共6个深度,如表1所示。第2列为对应的一阶固有频率f=ωn/(2π)。

表1 液体深度和一阶固有频率Tab.1 Liquid depth and the 1st natural frequency
如果简谐激励的幅值较小,则液体晃动幅度与激励频率密切相关——激励频率远离固有频率,液体仅为小幅晃动;激励频率约等于固有频率,液体为大幅晃动。因此,本文取一阶固有频率f的倍数作为激励频率,试验测量不同激励频率下的液体晃动力,以考察不同液体晃动幅度下浮板的晃动抑制效果。根据前期试验结果,将激励频率选为0.6f~1.2f,以0.1f递增。此外,液体大幅晃动时往往存在比较强的非线性,最大晃动力有可能不在固有频率处出现。因此,增加0.95f和1.05f两个激励频率以提高固有频率附近的分辨率。
所有试验工况中,简谐激励的幅值均为5 mm。
3.2 浮板结构和约束属性
浮板既是抑制液体运动的承力部件,又是绳索拉力的来源。为了能够提供足够的浮力并减小受力变形,浮板厚度不作为试验因素,选定为20 mm。
为使液体顺利流下,同时避免因卡顿造成的试验数据不准确,浮板与箱壁之间需要留有一定的空隙。结合箱体截面尺寸,浮板采用正方形截面,边长分别选为100 mm(小浮板)、150 mm(中浮板)和200 mm(大浮板)。计算可知,3种浮板面积与未扰动自由液面面积之比(浮板面积占比)分别为19.8%、44.5%和79.1%。用电子天平称得3种泡沫板的质量分别为4.8 g(小浮板)、10.8 g(中浮板)和19.1 g(大浮板)。
不同于固定挡板,浮板竖向位移由不能承受压力的柔性绳索限制时,浮板位置并不完全固定:液体深度小于绳索原长时,浮板漂浮于液面,浮板位置随液体深度增加而升高;液体深度等于绳索原长,浮板与液面平齐;液体深度大于绳长,浮板位于液面以下,位置不再随液体深度变化而变化。如果采用刚度系数较小的橡胶绳,情形则更加复杂:浮板浮力作用下,橡胶绳会有一定程度的拉伸。这样,在刚刚超过绳索原长的某个液体深度范围内,浮板会始终既漂浮于液面又被绳索约束。
基于这一思路,分别考虑绳索长度和弹性的影响。以表1所列液体深度为参考,选择3种绳索原长:150、200、250 mm。绳索弹性则通过弹性橡胶绳和几乎没有弹性的尼龙绳加以区分。
弹性橡胶绳为市购普通松紧带。橡胶绳和尼龙绳的直径均为3 mm。在微型材料实验机上进行拉伸试验,获取力和变形数据。经过线性拟合,得到橡胶绳的刚度约为67 N/m,尼龙绳的刚度约为30.7 kN/m,后者是前者的460倍。
为深入理解约束的作用,进一步考虑去掉绳索、仅有浮板(即约束绳索的刚度为0)的情形。为便于叙述,将没有任何约束、自由漂浮于液面的浮板称为自由浮板(Free floating plate,FFP);橡胶绳约束的浮板称为弹性约束浮板(Elastically constrained floating plate,ECFP);尼龙绳约束的浮板称为刚性约束浮板(Rigidly constrained floating plate,RCFP)。此处的“刚性”仅指尼龙绳弹性变形很小,浮板沿拉伸方向的运动可以忽略。
浮板结构和约束属性参数见表2。采用单因素法进行试验,每次只考虑一种因素。
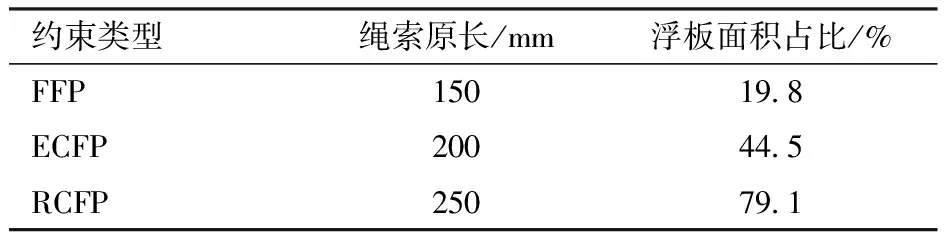
表2 浮板结构和约束属性Tab.2 Structure and constraint property
4 试验结果与分析
4.1 约束对液体晃动力的影响
简谐位移激励x=Asin(ωt)作用下,内壁光滑矩形箱体内液体晃动力F的幅值为[19]
(2)
式中ρ——液体密度,kg/m3
w——液体宽度,mm
A——简谐激励幅值,mm
ω——简谐激励圆频率,rad/s
x——箱体位移,mm
取边长为200 mm的浮板,分别以原长150 mm的橡胶绳和尼龙绳作为约束构成ECFP和RCFP(不加绳索则为FFP),以3.1节设置的液体深度和激励频率作为工况进行试验,结果如图4所示。为便于比较,同时绘出根据式(2)得到的晃动力理论曲线。

图4 不同约束浮板在各液体深度和频率处的晃动力变化曲线Fig.4 Sloshing force at different liquid depths and excitation frequencies for floating plate under different constraint conditions
由图可见,在整个液体深度和频率范围内,FFP的晃动力变化趋势与理论曲线一致,且在多个频率处试验值等于理论值。试验表明,FFP的抑制作用主要体现于固有频率附近。最大晃动力因FFP的存在减少5~7 N,为原始值的20%左右。因此,FFP的晃动抑制效果相对较差。FFP的优势在于,浮板始终漂浮于液面,抑制晃动的能力几乎不受液体深度的影响。
在各液体深度下,低频段的3个频率(0.6f、0.7f、0.8f)处,各种约束浮板的晃动力与理论曲线吻合良好。这是因为,激励频率远离固有频率,液体为小幅晃动,液面近似为平面。而浮板限制的是液体竖向位移,故对水平晃动力影响很小。高频段的两个频率(1.1f和1.2f)处,液体晃动幅度也相对较小,浮板的晃动抑制效果也相对较弱。因此,下面重点关注浮板在固有频率附近的晃动抑制作用。
液体深度为100 mm时, FFP、ECFP与RCFP在几乎所有激励频率下的晃动力均差别不大。最大差异出现于0.95f处,ECFP的晃动力约为FFP的1/2。分析其原因,绳索原长与液体深度之差为50 mm,浮板漂浮于液面。液体晃动幅度较小时,约束不起作用,所以晃动力与FFP几乎相同。在0.95f处,液体出现大幅晃动,浮板随液面上升,弹性绳被拉伸,产生恢复力,迫使浮板回弹。因此,自由液面的运动恢复至小幅晃动。虽然RCFP中的尼龙绳也被拉伸,但由于不存在回弹,液面晃动幅度仍然较大,所以晃动力并没有明显减小。
液体深度为150 mm和200 mm时,RCFP分别与液面平齐以及低于液面约50 mm;受浮板浮力作用,ECFP的弹性绳被拉伸,位置稍高。两种情形下,浮板将液体几乎完全“封住”,迫使液体随着箱体一起沿水平方向平移,而竖直方向的运动幅度很小。因此,ECFP和RCFP的晃动力均呈现出惯性力的特征——随激励频率增加而单调增加。由于没有大幅液体晃动,所以晃动力不存在峰值。在固有频率附近,二者晃动力仅为FFP的1/3~1/2。
液体深度为250 mm时,RCFP位于液面以下约100 mm。此处液体运动的幅度很小,大幅晃动主要发生于自由液面附近。换言之,浮板无法有效抑制上层液体的运动。因此,RCFP的晃动抑制作用已经大幅降低,稍优于FFP。在低于1.05f的频率范围内,ECFP的晃动力仍然呈现出惯性力特征。分析其原因,ECFP位置较高,浮板之上的液体深度相对较小。同时,跟随液体运动的浮板可使弹性绳进一步拉伸。浮板刚性转动,仍然保持近似平行于液面的状态,阻碍了液面的翻转与破碎,如图5a所示。

图5 有无ECFP液体晃动比较(液体深度250 mm)Fig.5 Liquid sloshing with/without ECFP (liquid depth was 250 mm)
液体深度为300 mm时,在0.95f处ECFP仍表现出一定的晃动抑制能力,但在其它频率处3种浮板的性能则相差无几。液体深度为350 mm时,在所有频率处3种浮板差别不大。这说明,如果浮板位于液面以下较深位置,无法限制上层液体的运动,则基本丧失了抑制晃动的能力。
可见,当浮板位于液面附近且弹性绳能被有效拉伸时,自由液面基本保持为平面,液体不存在大幅晃动。刚度小的橡胶绳容易产生大的弹性变形,一方面增加了浮板起作用的液体深度范围(在更大范围内,浮板与液面平齐或者贴近液面);另一方面,不同拉力下变形不同,浮板绕水平轴旋转,更好地保证了自由液面的线性运动。因此,在150~250 mm液体深度范围内,不管激励频率如何变化,液体运动均呈现为驻波形式,晃动力变化趋势也与低频段类似。换言之,与RCFP比较,ECFP可以在更大的液体深度范围内保持着良好的晃动抑制能力。
4.2 绳索长度对液体晃动力的影响
浮板位置与液体深度有关,但最高静平衡位置则取决于自身浮力、绳索刚度和绳索原长。浮板和橡胶绳一旦选定,则前两项因素即已确定。
取橡胶绳和边长200 mm的浮板构成ECFP,而橡胶绳的原长分别取150、200、250 mm,以3.1节设置的液体深度和激励频率作为工况进行试验,结果如图6所示。
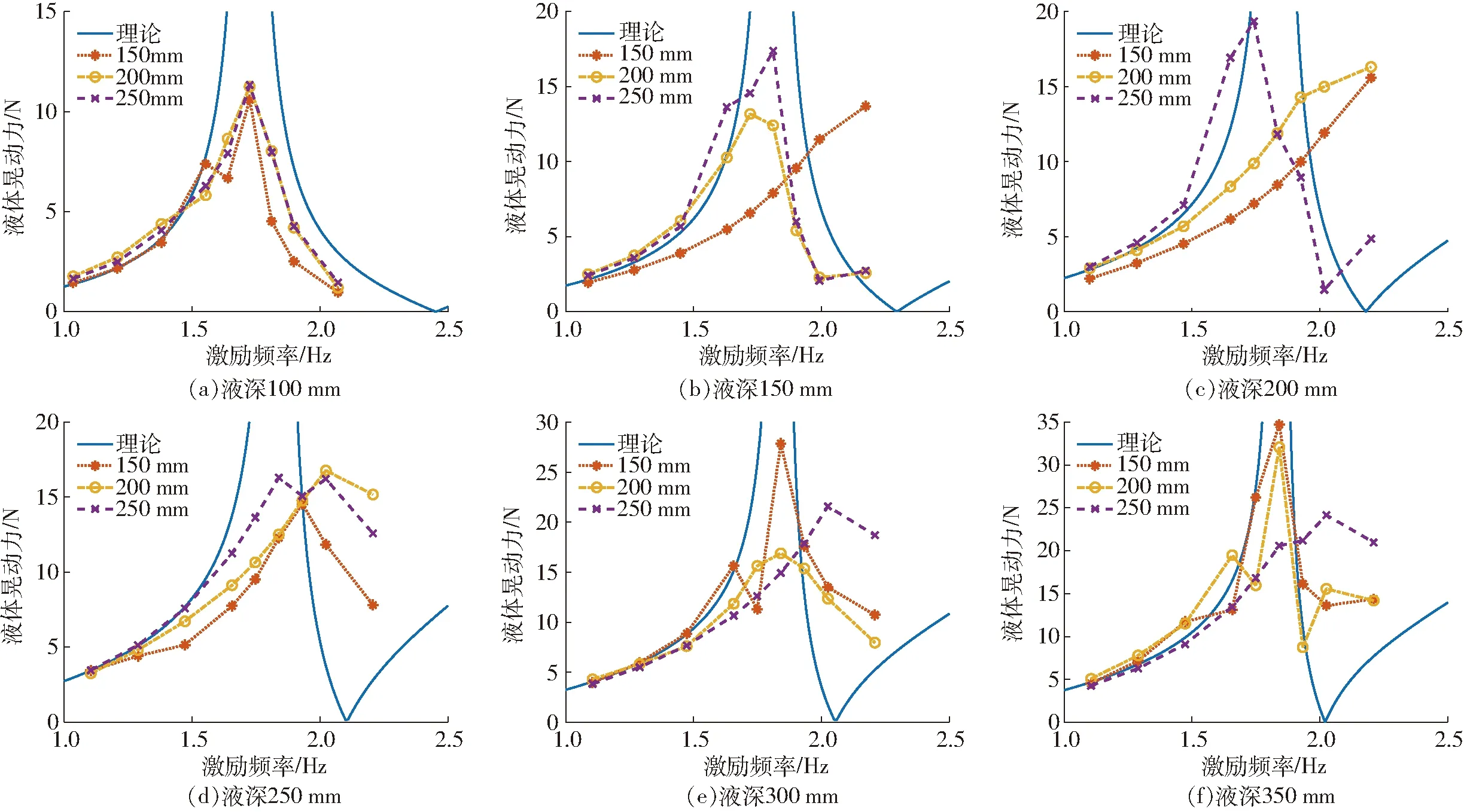
图6 不同绳长ECFP在各液体深度和频率处的晃动力变化曲线Fig.6 Sloshing force at different liquid depths and excitation frequencies for ECFP with different rope lengths
液体深度为100 mm时,3种绳长均大于液体深度,浮板漂浮于液面。其中,绳长150 mm浮板距离液面最近,0.95f处液体大幅晃动可以触发ECFP,晃动力减小。其它频率处晃动幅度较小,弹性绳未被拉伸,仅有浮板起作用。因此,晃动力基本相同。
液体深度为150 mm时,绳长150 mm的浮板与液面平齐,几乎将下面液体完全“封住”,使其与箱体一起运动。因此,晃动力表现出惯性力特征。绳长200 mm和250 mm的浮板均漂浮于液面,故二者表现类似。然而,在固有频率附近,绳长较短的ECFP会被液体大幅晃动触发,因而具有一定的抑制能力,晃动力略有减小。
液体深度为200 mm时,绳长150、200 mm的浮板分别低于液面约50 mm以及与液面平齐。在这两种情形下,无论激励频率是否接近固有频率,自由液面均可以保持为如图5a所示的近似平面,即晃动幅度很小。因此,晃动力的变化趋势类似于惯性力。经试验验证,与把液体完全封闭得到的惯性力相比,ECFP的晃动力稍大,但二者差异不超过20%。浮板位于液面附近时,ECFP具有良好的抑制晃动能力。绳长250 mm的浮板仍然漂浮于液面,抑制晃动的能力比较有限,故晃动力试验值与理论曲线趋势相同。
液体深度为250 mm时,最长的弹性绳开始受到牵拉,而较短的两根弹性绳则已充分拉伸。同时,浮板与自由液面之间的距离分别约为50 mm和100 mm,二者运动仍然保持着较强的耦合。因此,3种绳长的ECFP均可有效抑制液体的大幅晃动。最大晃动力差别不大,分别约为16 N和14 N。
液体深度为300 mm时,绳长150 mm的ECFP在0.95f处晃动力较低,晃动抑制能力尚存。然而,固有频率处的晃动力大幅上升,达到28 N,已基本丧失晃动抑制能力。绳长250 mm的ECFP晃动力表现为惯性力,固有频率处约为15 N。200 mm绳长ECFP的晃动力先升后降,最大值为16 N左右。这意味着它仍然保持着良好的晃动抑制能力。
液体深度为350 mm时,绳长200 mm的ECFP在0.95f处晃动力较低,但固有频率处的晃动力约为33 N,接近150 mm绳长 ECFP的35 N,说明二者抑制晃动的能力均已基本消失。250 mm绳长ECFP的晃动力仍然呈现出惯性力特征,固有频率处约为20 N。这是因为液面与浮板的距离约为50 mm,二者运动相互耦合,液面依然近似为平面。
总体来看,在250 mm及以下液体深度范围内,150 mm绳长ECFP呈现出良好的抑制能力,晃动力均小于15 N;液体深度为300、350 mm时,200 mm和250 mm绳长ECFP则表现更为优异。进一步说,晃动抑制效果取决于浮板与液面的相对位置:绳长略大于液体深度或者虽然小于液体深度但差值不大(不超过100 mm)时,跟随液体运动的浮板使弹性绳拉伸,弹性力又反作用于浮板。在液体压力和弹性力共同作用下,浮板产生升降及旋转等刚体运动,进一步影响周围液体的运动,使自由液面基本保持为平面,液体为小幅晃动,从而大大减小了晃动力。
4.3 浮板面积对液体晃动力的影响
取原长150 mm的橡胶绳和3种不同边长的浮板(大、中、小)构成ECFP,在各液体深度和激励频率下进行试验,结果如图7所示。
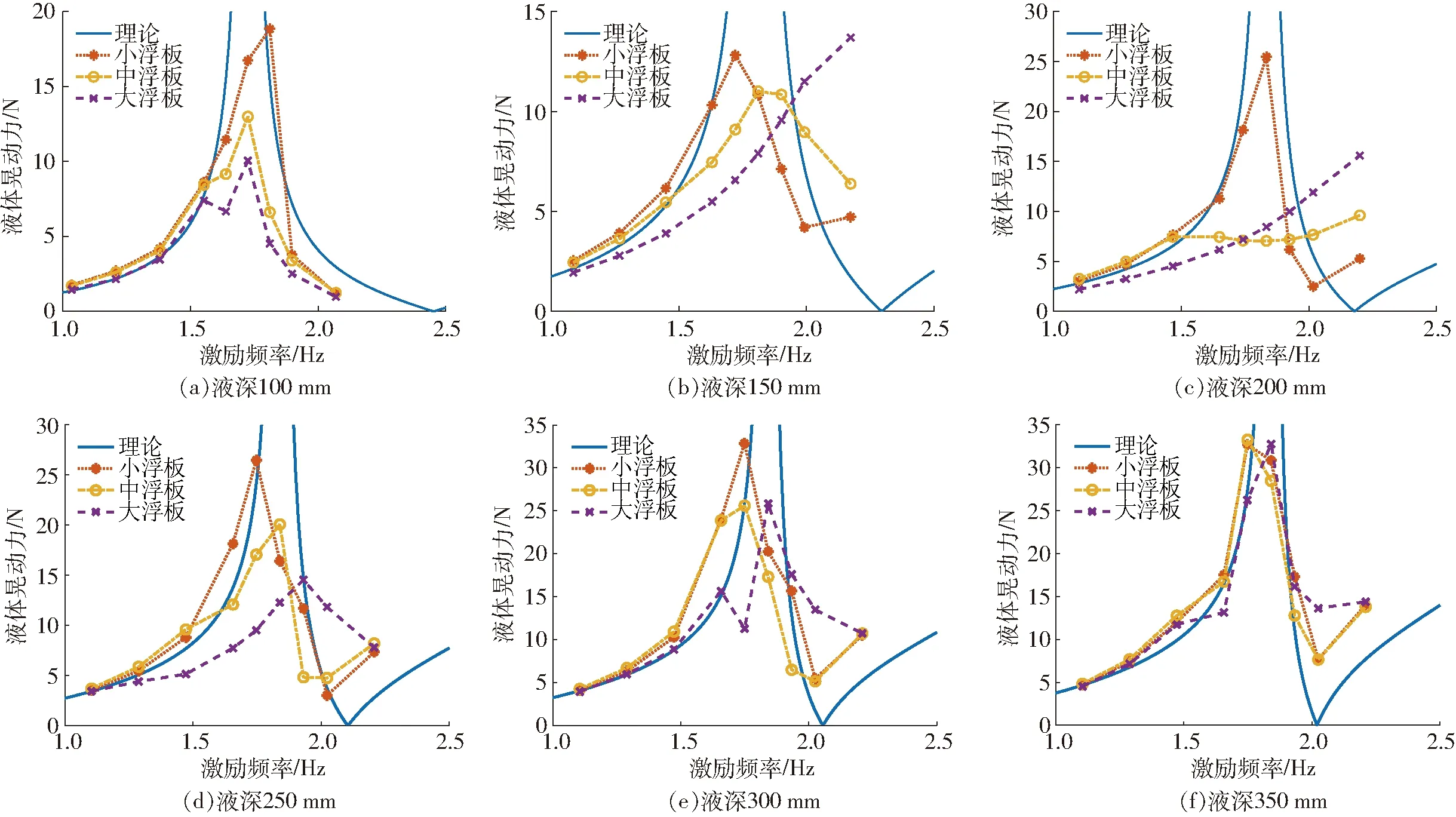
图7 不同大小ECFP在各液体深度和频率处的晃动力变化曲线Fig.7 Sloshing force at different liquid depths and excitation frequencies for ECFP with different sizes
液体深度为100 mm时,固有频率附近液体晃动力随浮板面积增大而减小。即:浮板面积越大,晃动抑制效果越好。晃动时波高极值一般出现于壁面处。受边长限制,处于漂浮状态的中、小浮板难以产生足够大的运动牵拉弹性绳。因此,它们的表现类似于FFP。其中,小浮板边长不到箱体长度的1/2,无法有效影响液面的破碎与翻转,几乎没有抑制晃动的能力。因此,最大晃动力与无浮板的情形基本相同。
液体深度为150 mm时,浮板与液面平齐。虽然中、小浮板覆盖的液面面积相对较小,但固有频率附近晃动力亦有一定程度的减小。这一点可由图4b、图6b和图7a看出。分析其原因,固有频率附近液体晃动幅度较大,弹性绳受到牵拉,产生较大的弹性恢复力,迫使浮板回弹。虽然浮板只能覆盖一部分液面,但浮板的侧面以及刚性旋转后的顶面和底面可以阻碍液体沿水平方向的运动,减小了液体对箱壁的冲击以及沿壁面的爬升。面积大的浮板阻碍作用强,故晃动力较小。
液体深度为200 mm时,在整个频率范围内,小浮板的晃动力与理论值差别不大,最大值约为25 N。这说明小浮板对液体晃动影响较小。分析其原因,浮板边长不到箱体长度的1/2,且位于箱体中间位置。浮板两侧的液体并未被有效束缚,大幅晃动时仍然可以沿箱壁爬升。因此,晃动力类似于无浮板的情形。除0.6f和0.7f外,中浮板的晃动力基本保持不变,均小于10 N,表现出非常优异的晃动抑制能力。推测其原因,两侧及上层液体没有被浮板有效限制,而是有一定的晃动,但该晃动力与液体惯性力存在相位差异,使得晃动力减小。更深层次的物理本质需要借助高速摄影或者数值模拟等手段进一步研究。
液体深度为250 mm和300 mm时,在整个频率范围内,小浮板晃动力变化趋势与理论曲线一致,最大值分别为26 N和33 N,晃动抑制能力已完全丧失。中浮板在固有频率附近还存在一定的抑制能力,表现为中、小浮板的最大晃动力差值为8 N左右。
液体深度为350 mm时,浮板位于自由液面以下约200 mm。不管面积大小,浮板均已无法抑制上层液体的运动。因此,3种浮板的晃动力基本相同。
总体来看,浮板面积越大,晃动抑制效果越好。但是,浮板位于自由液面附近的液体深度范围(150~250 mm)内,面积占比为44.5%的浮板仍然具有很好的晃动抑制效果。这为药箱内浮板的布置提供了更多空间和灵活性。
图8给出了采用不同尺寸浮板抑制液体大幅晃动时的液面波形。其中,液体深度为250 mm,激励频率为0.95f。
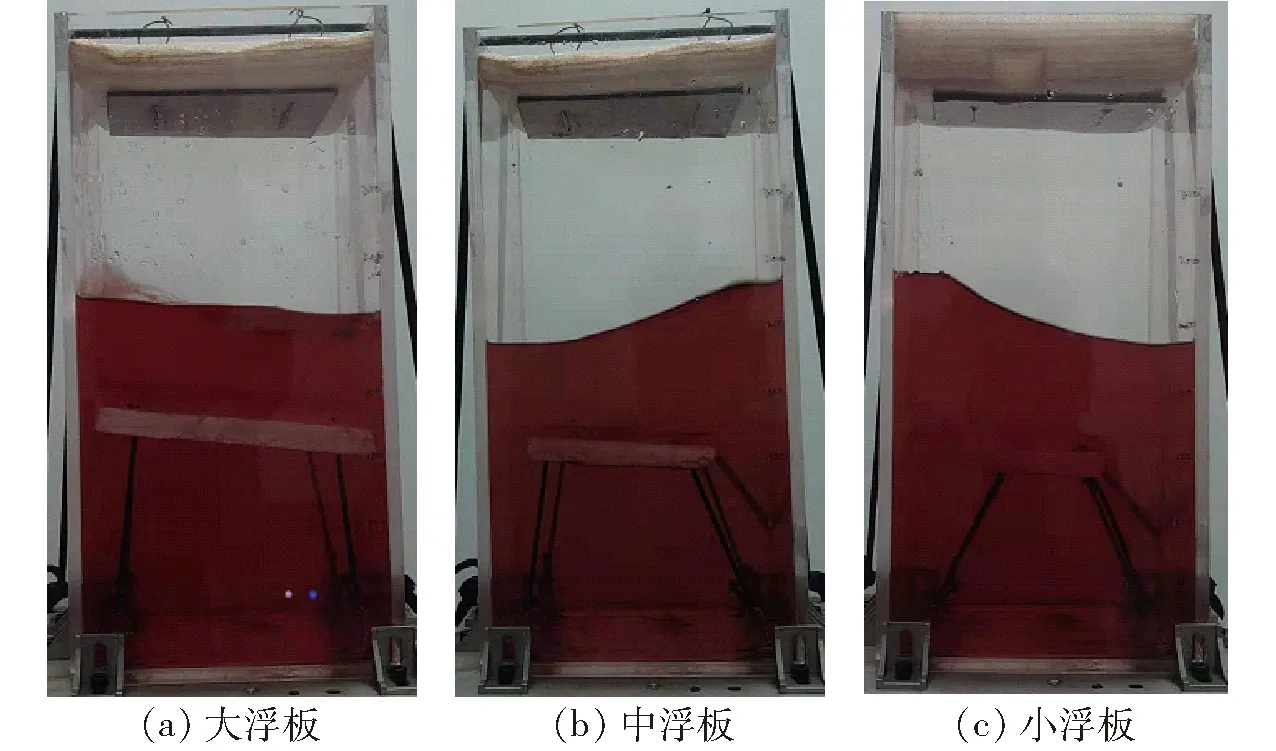
图8 不同尺寸浮板晃动抑制效果比较Fig.8 Effects of liquid sloshing suppression for ECFP with different sizes
可见,图8a中液面基本为平面,而图8b、8c中液面为曲面,晃动幅度明显增大。一方面,面积越大,浮板对上层液体的影响范围越大;另一方面,大浮板的浮力大,弹性绳伸展更充分,浮板更加靠近自由液面,对上层液体的作用也更为直接和强烈。
4.4 浮板对液体阻尼的影响
ECFP的作用不仅仅体现于稳态激励阶段。试验发现,激励停止、液体进入自由晃动阶段,ECFP依然可以有效抑制液体运动,使自由液面更快地恢复至静止状态。这意味着,ECFP增大了晃动系统的阻尼比,使液体晃动衰减更加迅速。
利用对数衰减法,采用自由衰减阶段的晃动力幅值计算阻尼比。为获得更高精度,采用相隔j个周期的晃动力峰值来计算阻尼比,近似计算公式为
(3)
式中ξ——阻尼比
Fi、Fi+j——相隔j个周期的任意两个晃动力峰值
液体晃动幅度较小时,衰减振荡的周期数目较少,而约束浮板又使衰减过程进一步加速,不利于阻尼比的计算。因此,此处仅考虑液体大幅晃动时ECFP的阻尼作用。为便于比较,均采用激励频率等于固有频率时的数据进行计算。不同液体深度、不同约束情形下的阻尼比如图9所示。绳索原长、浮板边长分别为150 mm和200 mm。

图9 不同情形下的阻尼比Fig.9 Damping ratio under different conditions
可以看出,没有浮板时,各深度的阻尼比均不到1%;增设FFP后,阻尼比有了较大的增加,基本处于2%~3%之间,随液体深度不同而略有变化;ECFP使阻尼比进一步提高,大部分在3%~5%之间,随液体深度变化较为明显。
分析其原因,仅有液体情形下,阻尼比主要来自于液体内部以及液体与壁面的摩擦作用。漂浮于液面的FFP与液体之间存在一定的相对运动,增大了摩擦耗散。同时,浮板与壁面之间也存在碰撞和摩擦。因此,与没有浮板的情形相比,阻尼比有了较大增加。另外,无论液体深度如何变化,FFP始终漂浮于液面。因此,尽管大小有所不同,但阻尼比与液体深度之间的关系并不十分明显。
ECFP使阻尼比进一步增加,应该是来自于弹性绳本身的弹性变形以及绳子与液体的相对运动。200 mm液体深度附近阻尼比最大,应该是因为浮板漂浮于液面,同时弹性绳被充分拉伸,浮板抑制液体晃动的能力较强,液面可以快速平复。随着液体深度进一步增加,浮板上方参与自由晃动的液体逐渐增加,液体晃动恢复变慢,从而阻尼比逐步下降。
应该指出,ECFP使不断往复运动的自由液面更快地平复。这一点对飞行姿态经常变化的植保无人机来讲尤为重要。因为这意味着飞行姿态变化引起的液体晃动力对飞机本体的反作用时间更短,更有利于姿态的调整。这对于提高施药效果、减少动力消耗、提高续航能力、降低操作者劳动强度都是有益的。
5 结论
(1)浮板与液面平齐或者稍低于液面(不超过50 mm)时,RCFP晃动抑制效果良好。与RCFP相比,ECFP在更大的液体深度范围内具有良好的晃动抑制能力。虽然在整个液体深度范围内均有效果,但FFP晃动抑制能力相对有限。
(2)浮板位于自由液面附近且弹性绳能被拉伸时,ECFP可显著提高液体晃动抑制效果。固有频率附近,液体晃动力仅为原来的1/3~1/2。然而,位于液面以下较深位置时,ECFP基本丧失液体晃动抑制能力。因此,需要根据液体深度变化范围合理选择绳索长度或者增加浮板层数。
(3)浮板面积越大,晃动抑制效果越好。位于液面附近时,面积占比为44.5%的浮板亦可获得良好的抑制效果。这给浮板布置提供了更加灵活的选择。
(4)ECFP可以迅速衰减自由液面的晃动,显著增加晃动系统的阻尼比。对飞行姿态频繁改变、箱内液体易于出现大幅晃动的植保无人机来说,这一点有着更为重要的实用价值。
