无依托瞄准技术在运载火箭基准确立上应用的研究
2023-06-19刘聪聪宋小艳
范 毅,何 欢,刘聪聪,宋小艳
无依托瞄准技术在运载火箭基准确立上应用的研究
范 毅,何 欢,刘聪聪,宋小艳
(北京航天发射技术研究所,北京,100076)
针对大型运载火箭无人值守瞄准的需求,提出一种基于激光捷联惯组与瞄准仪相结合的无依托瞄准方法,通过激光惯组自主寻北获得北向基准,再测量出箭上惯性单元棱镜法线与返回光束的准直偏差角,将数据进行合成、解算,最终获得箭上惯组棱镜的初始方位。无依托瞄准技术具有组成简单、自动化程度高、操作流程简化、精度指标可靠的特点,可以提供不大于2’的瞄准综合误差,技术成果满足中国航天发射任务的应用需求,可供未来大型运载火箭瞄准方式参考。
运载火箭;无依托瞄准;激光捷联惯组
0 引 言
火箭地面瞄准系统的作用,是调整火箭制导系统中惯性器件的方位敏感轴,使之与射击方向(以下简称射向)或已知方向(与射向保持已知角度值)所在的铅垂面相垂直[1],或通过精确测量获得惯性器件的方位敏感轴与射向的偏差角,从而保证火箭初始方位精度[2],在起飞前通过地面瞄准确定火箭起飞初始方位。
伴随着航天全球化的发展趋势,运载技术发展速度明显加快,以美国为代表的航天大国已由单纯追求更大运载能力向“快速、经济、可靠、安全”等方向转变。国际上大中型运载火箭在发射场测试的流程一般20天左右,火箭到发射台后基本实现无人自动操作,具备在多处不同地点进行协同远程发射控制、辅助支持工作的能力[3]。随着近些年以激光捷联惯组为核心的定位定向瞄准技术的发展,在瞄准精度方面获得了较大的突破和提升,其精度指标可以和传统地面瞄准相提并论,而且在工作环境和工作时间上更有优势,使通过惯组建立火箭起飞基准的方法成为可能[4],这为运载火箭提供了无依托的基准建立方式。
1 无依托瞄准方案
1.1 方案原理
无依托瞄准是相对于以往有基准的地面瞄准方式而言,指不依靠地面基准,自主定位定向的瞄准方式。
以往地面瞄准通过在地面建设地标点位从而获得基准边,通过瞄准仪瞄准已知基准边确立基准方位,或者瞄准预先建立的基准棱镜确立基准方位,再转动瞄准仪瞄准箭上惯性单元棱镜确定箭体初始方位。这种地面瞄准方式的缺点是需要建立固定的瞄准点位和初始瞄准方向,瞄准点位需要定期标定。
无依托瞄准设备依据发射场火箭的架设位置,大致架设到箭上惯性单元棱镜的法线方向,如图1所示。工作时,无依托瞄准设备自主寻北获得北向基准,由瞄准光管或者瞄准仪向箭上棱镜发出一束光线,再测量出箭上惯性单元棱镜法线与返回光束的准直偏差角,将数据进行合成、解算,最终获得箭上惯组棱镜的初始方位。采用无依托瞄准设备可以简化瞄准设备,摆脱发射场地束缚,提高运载火箭发射的机动性。
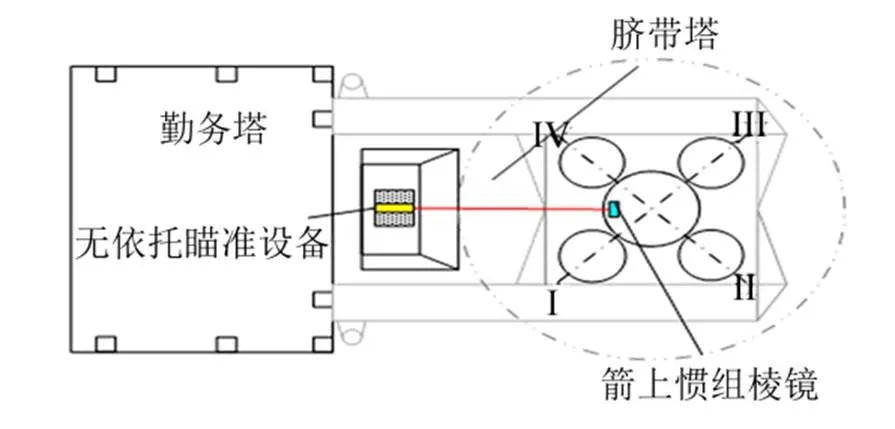
图1 无依托瞄准设备的架设
1.2 发射场布局
无依托瞄准设备由激光捷联惯组、自准直光管(或者瞄准仪)、卫星定位设备、瞄准控制器等组成。在运载火箭发射场可以采用两种瞄准布局方式:火箭发射塔瞄准和移动瞄准车瞄准。
在火箭发射塔状态,瞄准设备放置在与箭上惯组棱镜等高的脐带塔上,激光惯组与自准直光管捷联,通过激光惯组自主寻北获得光管架设位置与北向夹角,自准直光管发出一束光线至箭上棱镜,移动瞄准设备架设位置使返回光进入自准直光管敏区,从而获得箭上棱镜与北向夹角,瞄准设备架设示意见图2。
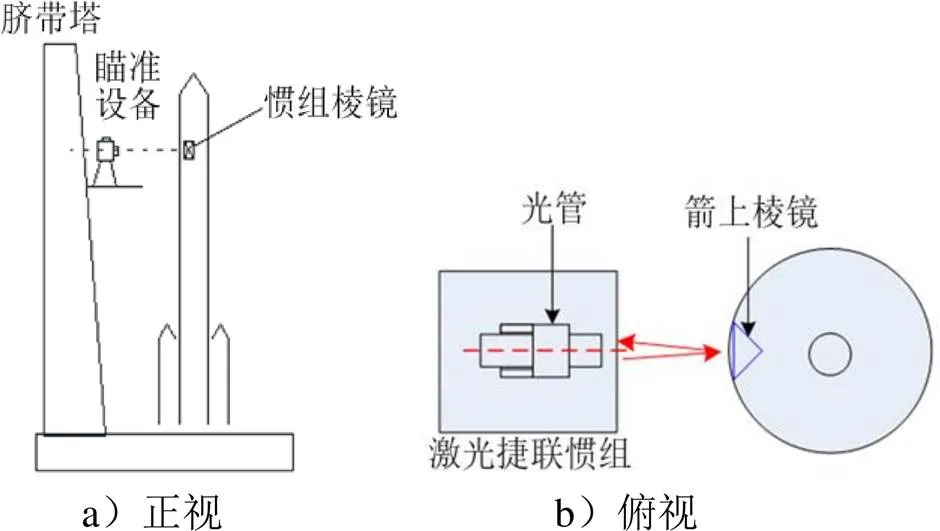
图2 瞄准设备的布置
随着扰动基座寻北技术的应用,瞄准设备具备了高精度惯性寻北能力,这为运载火箭发射场提供了移动瞄准车瞄准的新方式。在瞄准车上激光惯组与瞄准仪捷联,通过激光惯组自主寻北获得瞄准仪光管与北向夹角。瞄准仪发出一束光线至箭上棱镜,移动瞄准仪使返回光进入瞄准仪光管敏区,从而获得箭上棱镜与北向夹角,图3给出瞄准车瞄准发射场架设示意。
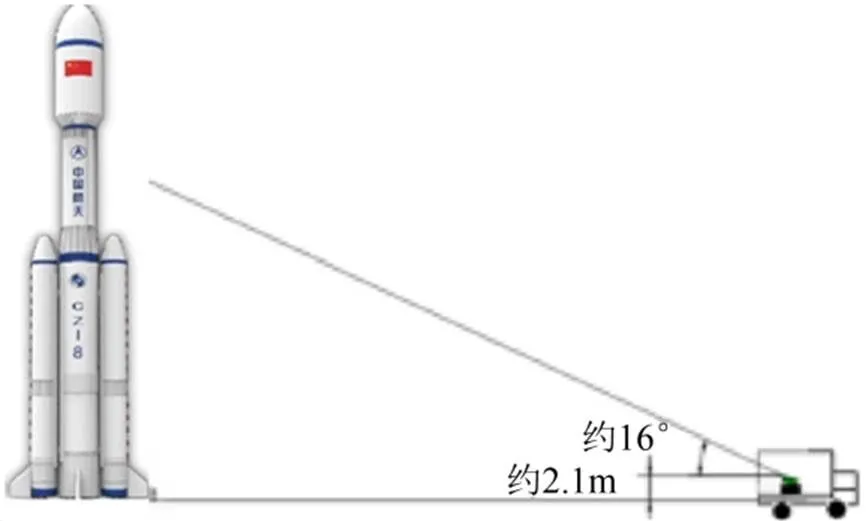
图3 无依托瞄准设备在发射场布置
1.3 设备组成及工作模式
无依托瞄准设备示意如图4所示。激光捷联惯组可以实现自主惯性寻北,激光捷联惯组采用多位置寻北方案,对惯性器件误差进行补偿,消除其对寻北精度的影响。采用扰动基座寻北技术实现扰动基座下的高精度惯性寻北能力,满足多种工况下塔态或车载的使用条件要求。
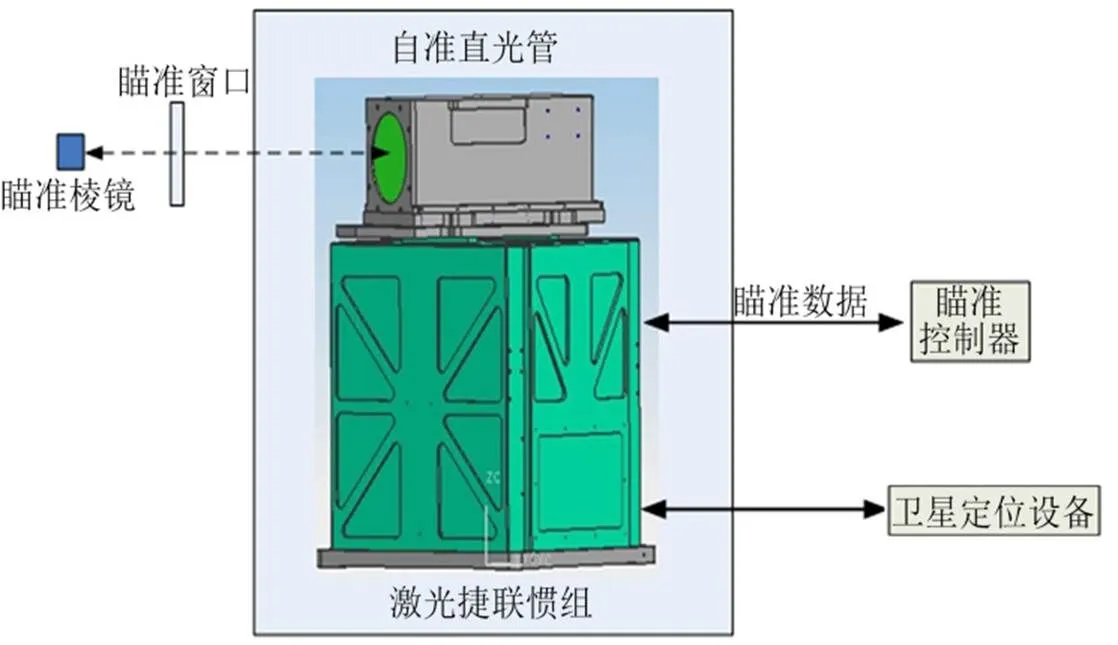
图4 无依托瞄准设备的组成
激光捷联惯组惯性寻北的同时,自准直光管实时测量准直偏差角,并将准直偏差角传递至激光捷联惯组进行计算。在惯性寻北完成后,将北向基准传递至与其固联的自准直光管光轴上,激光捷联惯组将对准结果与收到的自准直光管准直偏差角进行合成解算,获得瞄准棱镜等效法线方位角,并将瞄准结果传输至瞄准控制器,瞄准控制器收集卫星定位信息和瞄准数据通过网络传递给运载火箭控制系统。
2 无依托瞄准理论推导


N—北向基准方向;—自准直光管光轴基准方位角,即瞄准基准方位角;—自准直光管光轴与箭上瞄准棱镜法线之间的准直偏差角;—箭上瞄准棱镜等效法线的方位角。
2.1 定义坐标系
2.1.1 n系:地理坐标系
地理坐标系是原点位于运载体所在的地球表面,其中一轴与地理垂线重合的右手直角坐标系。n轴指向东,即E;n轴指向北,即N;n轴沿地垂线指向天顶,即U。这个坐标系通常叫作东北天(ENU)坐标系。地理坐标系即为本系统的导航坐标系[5]。
2.1.2 b系:载体坐标系(惯组坐标系)
载体坐标系的原点是载体重心,b沿载体横轴指向右,b沿载体纵轴方向指向前,b沿载体竖轴方向向上,坐标系构成右手直角坐标系。
2.1.3 t系:光管坐标系
光管坐标系的原点在光管中心t,t轴为光轴方向;ttt平面与光轴t垂直,t、t在ttt平面内相互垂直且t轴沿光管光轴指向右,构成右手坐标系。
2.2 惯组载体坐标系与地理坐标系(导航坐标系)之间的转换

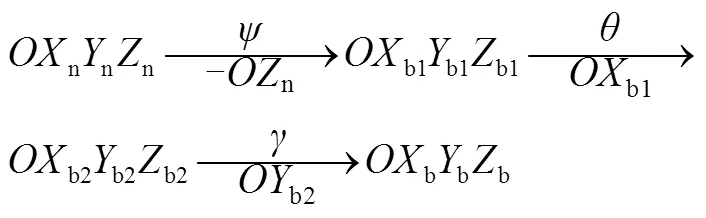
其变换表达式为

则,姿态矩阵为

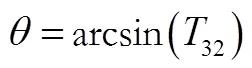
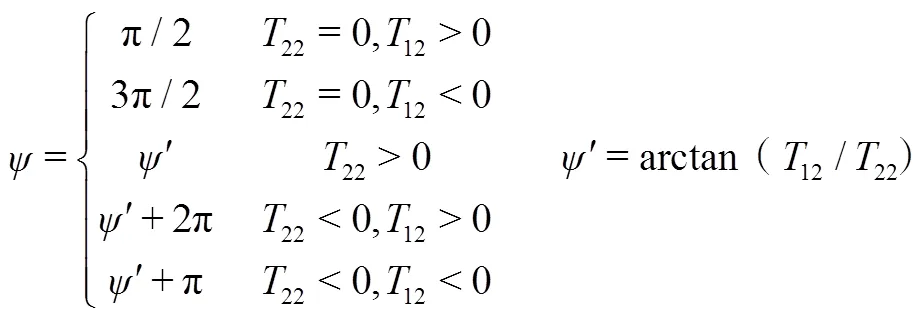
姿态角按式(3)~(5)计算:


2.3 光管坐标系向地理坐标系之间的转换
激光捷联惯组载体坐标系(惯组本体b系)和自准直光管坐标系(t系)如图6所示。
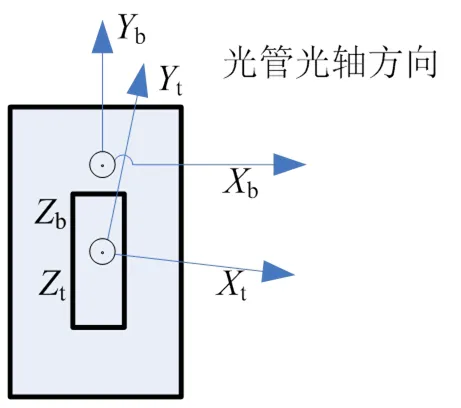
图6 惯组坐标系和光管坐标系
光管和惯组在当地地理坐标系下的安装误差角可按式(6)~(8)计算:

则可按式(9)计算两坐标系误差修正矩阵:


自准直光管光轴方位角(光轴相对大地北向夹角)、俯仰角及横滚角可按式(11)~(13)计算:



瞄准棱镜等效法线的方位角为

综上所述,瞄准过程即获得箭上瞄准棱镜法线方位角的过程,主要包括3部分:
a)采用三轴激光捷联惯组,三位置寻北方案,获得捷联惯组本体系相对导航坐标系(当地地理坐标系)间姿态矩阵,完成初始对准;
b)自准直光管与激光捷联惯组固联,对惯组坐标系和自准直光管坐标系进行标定,获得两者的安装误差矩阵,通过坐标系变换,获得光管光轴的方位角和姿态角;
c)利用自准直光管对瞄准棱镜法线的自准直偏差角测量,获得瞄准棱镜法线方位角,即瞄准角,完成瞄准过程。
3 瞄准误差分析
无依托瞄准设备瞄准误差包括激光捷联惯组寻北误差、自准直光管测量误差、常数传递及稳定性误差。激光捷联惯组寻北误差的误差源包括:陀螺零偏,加速度计零偏引起的方位误差,加速度计与陀螺敏感轴不平行误差,陀螺标度误差,温度误差,输出传递误差等。
陀螺零偏参数是激光惯组的重要误差参数之一,是衡量激光陀螺精度水平的重要指标。对于激光捷联惯组而言,零偏参数具有随机变化的特点,其稳定性对惯性导航精度影响巨大,技术指标要求十分严格,只有零偏稳定性满足要求,才能通过一定技术手段减小零偏带来的影响。
加速度计在理想状态下,当外部输入加速度为零时,加速度计的输出电流也应为零。但实际应用中,受机械结构、电子器件等因素的影响,在输入加速度为零的情况下,加速度计也会有电流输出,即存在零位偏移。
采用多位置对准,理论上陀螺常值零偏带来的方位误差和加速度计的常值零偏带来的方位误差可以对偶相消,因此,从捷联惯组的寻北理论可知,其方位对准误差可表示为[9]
从式(15)中可以看出,方位对准误差包含两个分量:残余的陀螺零偏;北向轴的调平或倾斜误差。
加速度计与陀螺敏感轴不平行误差是水平状态下,加速度计敏感轴与陀螺敏感轴不平行引起的误差,通过系统级标定,不平行误差可以测定。
陀螺标度误差是指标度因数的实际值相对标称值的变化,工程应用中,因激光陀螺自身的特点,其标定因数一般比较稳定,在短时间内变化量较小,因此,在惯组系统中,可以通过系统级标定,测出陀螺的标度因数。
温度变化是对惯性器件误差变化的外界环境影响因数。为了降低和补偿温度对惯性器件精度的影响,通过温度试验,识别出惯性器件的温度模型,计算出相应的误差项并实时进行补偿。
输出传递误差是输出过程中多项误差共同作用的结果,在误差计算中需予以考虑。
结合上述的误差分析,汇总各项误差,并考虑工作环境等影响,则激光捷联惯组寻北误差(2.7)不大于60″。


4 试验验证
利用大地测量基准边,通过经纬仪传递测量校准无依托瞄准设备瞄准误差,无依托瞄准设备的校准如图7所示。
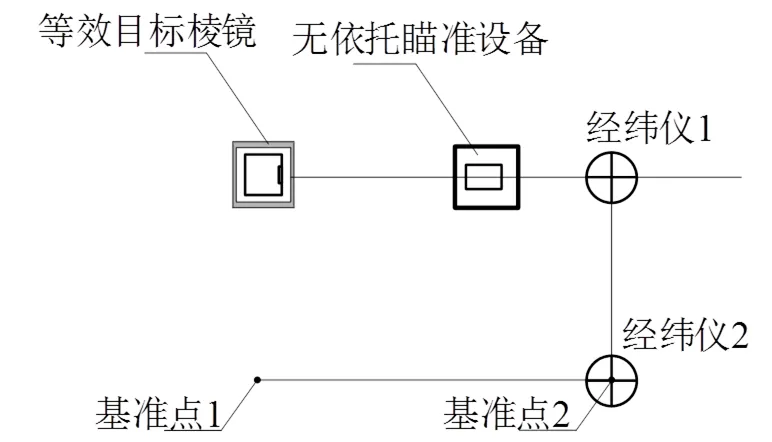
图7 无依托瞄准设备的校准
在等效目标棱镜法线方向架设无依托瞄准设备,在瞄准设备正后方架设经纬仪1,在方位基准点上1架设标杆仪,在基准点2上架设经纬仪2。无依托瞄准设备工作获得一组瞄准数据,经纬仪瞄准基准边传递获得校准数据,通过比对两组瞄准数据获得瞄准误差。瞄准数据校准对比误差数据如表1所示。试验结果显示,无依托瞄准设备的瞄准误差不大于2′。
表1 瞄准数据校准对比表
Tab.1 Comparison of aiming and calibration
序号瞄准校准瞄准-校准 1154°41′33″154°40′40″53″ 2154°45′30″154°45′18″12″ 3340°13′7″340°13′18″-11″ 4340°15′22″340°15′58″-36″
5 结束语
无依托瞄准技术具有设备组成简单、自动化程度高、操作流程简化、精度指标可靠的优势,可以满足中国航天无人值守发射的应用需求,为中国航天事业发展提供有力支撑,在未来大型运载火箭上有广阔的应用前景。
[1] 肖锡珙. 发射技术(中)[M]. 北京: 宇航出版社, 1990.
XIAO Xihong. Launch technology(middle)[M]. Beijing: China Astronautic Publishing House, 1990.
[2] 贺长水, 解英梅, 李朝阳, 等. 新一代运载火箭扭转、偏摆同步测量技术研究[J]. 导弹与航天运载技术, 2017(1): 65-69.
HE Changshui, XIE Yingmei, LI Zhaoyang, et al. Synchronous measurement of torsion and deflection for new generation launch vehicle[J]. Missiles and Space Vehicles, 2017(1): 65-69.
[3] 王小军, 徐利杰. 我国新一代中型高轨运载火箭发展研究[J]. 宇航总体技术, 2019, 3(5): 1-9.
WANG Xiaojun, XU Lijie. Research on the development of new generation medium high-orbit lauch vehicle in China[J]. Astronautical Systems Engineering Technology, 2019, 3(5): 1-9.
[4] 彭蓉, 严恭敏, 秦永元. 箭载捷联惯导系统水平自对准的两种实用方法[J]. 中国惯性技术学报, 2009, 17(4): 428-435.
PENG Rong, YAN Gongmin, QIN Yongyuan. Two practical methods of autonomous leveling alignment for launch vehicle SINS[J]. Journal of Chinese Inertial Technology, 2009, 17(4): 428-435.
[5] 裴忠海, 余薛浩, 王鹏, 等. 运载火箭捷联惯组全自动对准技术应用研究[J]. 上海航天, 2018, 5(35): 110-115.
PEI Zhonghai, YU Xuehao, WANG Peng, et al. Application of autonomous alignment for strapdown inertial measurement unit on launch vehicle[J]. Aerospace Shanghai, 2018, 5(35): 110-115.
[6] 秦永元. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学, 1998.
QIN Yongyuan. Theory of Kalman filer and integrated navigation[M]. Xi´an: Northwest Polytechnical University Press, 1998.
[7] 张宗麟. 惯性导航与组合导航[M]. 北京: 航空工业出版社, 2000.
ZHANG Zonglin. Inertial navigation and integrated navigation[M]. Beijing: Aviation Industry Press, 2000.
[8] 程向红, 万德钧, 仲巡. 捷联惯导系统的可观测性和可观测度的研究[J].东南大学学报, 1997, 27(6): 6-10.
CHENG Xianghong, WAN Dejun, ZHONG Xun. Study on observability and its degree of strapdown inertial navigation system[J]. Journal of Southeast University, 1997, 27(6): 6-10.
[9] 王新龙. 惯性导航基础[M]. 西安: 西北工业大学出版社, 2013.
WANG Xinlong. Fundamentals of inertial navigation[M]. Beijing: Northwestern Polytechnical University Press, 2013.
Application of Unsupported Aiming Technology in the Establishment of Launch Vehicle Initial Position
FAN Yi, HE Huan, LIU Congcong, SONG Xiaoyan
(Beijing Institute of Space Launch Technology, Beijing, 100076)
An unsupported aiming method was proposed based on the combination of laser gyro strap down inertial measurement unit and collimator for unattended aim of large-scale launch vehicle, obtain the north reference through the autonomous north finding of the laser inertial unit, and then measure deviation between the inertial unit prism of the launch vehicle and the line of the returning beam, The data is included and calculated, and the initial position is finally obtained. The unsupported aiming technology is simple, automatic, optimized and reliable. It has a aiming error not greater than 2′. The technology meet the requirements of space launch and can be used as a reference for the aiming method of the future large-scale launch vehicle.
launch vehicle; unsupported aiming; laser gyro strap down inertial measurement unit
2097-1974(2023)02-0071-06
10.7654/j.issn.2097-1974.20230214
V556
A
2022-10-18;
2023-03-29
范 毅(1978-),男,高级工程师,主要研究方向为光电与精密仪器设计。
何 欢(1978-),男,高级工程师,主要研究方向为电子电气仪器设计。
刘聪聪(1978-),男,高级工程师,主要研究方向为地面发射技术设计。
宋小艳(1980-),女,高级工程师,主要研究方向为光学精密仪器设计。
