基于PID代价函数的鲁棒型永磁同步电机模型预测控制
2023-06-17刘锡均谷爱昱庞城洁
刘锡均,谷爱昱,庞城洁
(广东工业大学 自动化学院,广东 广州 510006)
永磁同步电机具有结构简单、工作效率高和宽调速范围等优点,在电动汽车领域得到广泛的应用[1-2]。为了提高PMSM系统的控制性能衍生出很多先进控制算法,近年来有限集模型预测控制受到越来越多的关注[3-4]。FCS-MPC具有简单的控制结构、直观的控制原理和其目标函数可实现多目标协同控制等优点[5-6],FCS-MPC对控制量的预测是实现控制的前提,代价函数对控制目标有着决定性意义,因此,通过对代价函数的改进可实现不同的优化目标[7]。但FCS-MPC的控制性能高度依赖模型参数,存在参数鲁棒性较差的问题。目前国内外学者主要是围绕多目标协同开展研究[8-10],而关于系统参数鲁棒性问题的研究并不多。在另一方面,为了满足电动汽车用PMSM系统宽调速范围的需求,控制策略通常在基速以下采用最大转矩电流比(Maximum Torque Per Ampere,MTPA)控制;基速以上,通过弱磁控制实现电机转速进一步的提高[11]。在这过程中,尤其是高速弱磁区,PMSM的电感会随着磁路饱和程度变化,电阻和永磁体磁链随着温度变化,这些电机参数的变化会导致FCS-MPC电流控制误差变大,影响系统的控制性能[12]。
为了提高FCS-MPC在PMSM控制系统的参数鲁棒性,文献[13]采用基于预测误差补偿的策略,当PMSM的参数失配时,通过在线误差补偿实现模型预测电流的准确性。但是该策略的预测误差信息需要更新,会出现停滞的状态导致预测电流不准确的问题。文献[14]针对FCS-MPC策略高度依赖预测模型而参数失配会导致预测误差变大的问题,提出基于扩张状态观测器(Expansion State Observer, ESO)的预测误差补偿方案,该方法采用两步预测流程,利用ESO观测的结果构建延迟补偿的预测模型,但增大了预测环节的计算量。文献[15]引入了电感参数辨识的方法,对电机电感参数进行在线辨识,通过实时调整电机电感提高模型参数的准确度,从而得到良好的控制性能。然而电机的参数除了电感,还有电阻、永磁体磁链等,同时辨识全部参数会产生欠秩问题,因此采用参数辨识的方法一般只是辨识几个关键的参数,并且其辨识精度也会受到多方面的因素影响,如饱和、逆变器死区等,使得该方法在实际上很难精确。文献[16]针对FCS-MPC参数敏感的问题,提出一种PID型代价函数的FCS-MPC改善系统的控制性能,但只是研究基速以下的情况,并未涉及高速弱磁区的PMSM系统参数敏感性的问题。
为了解决基于FCS-MPC的PMSM系统参数敏感性问题,本文提出将基于PID型代价函数的FCSMPC(简称PID-MPC) 应用在PMSM弱磁控制中。在低速MTPA区和高速弱磁区预测模型参数失配时,PID-MPC分别通过代价函数的积分误差项和微分误差项抑制电流稳态误差和电流纹波误差,不仅提升了FCS-MPC控制系统的参数鲁棒性,还保留了传统FCS-MPC的良好动态性能。
1 PMSM的数学模型及弱磁控制原理
1.1 PMSM数学模型
为了建立PMSM的d、q轴数学模型,首先假设:(1) 忽略铁心的饱和;(2) 不计涡流和磁滞损耗;(3) 定子电流为对称的三相正弦波电流。
由此可得到PMSM在d-q坐标系下的数学模型。
电压方程为
电磁转矩方程为
式中:ud、uq分别为d、q轴电压;id、iq分别为d、q轴电流;Ld、Lq分别为d、q轴电感;Rs为定子电阻;ωe为转子的电角速度;ψf为转子永磁体磁链;pn为电机极对数。
1.2 弱磁控制原理
PMSM弱磁控制的思想是利用气隙磁场的电枢反应,通过调节定子电流的分配来削弱主磁场,增加电机的d轴去磁电流分量和减少q轴电流分量来维持电机在高速运行中的电压平衡的关系,即弱磁控制。
由于受逆变器的最大电压Umax输出能力和所允许最大电流Imax限制,在d-q坐标系下,PMSM的电流、电压约束方程为
式中:is、us分别为电机定子电流和电压。
当PMSM在高速运行时,电机的电阻远小于电抗,因此可忽略Rs以及电阻上的压降,可得高速时稳态电压方程为
将式(5) 代入式(4) 中,可得电压椭圆方程为
如图1所示,建立id-iq坐标系,由式(3) 电流约束方程,可画出以原点O为圆心,电流Imax为半径的电流极限圆;由式(6) 电压椭圆方程,可画出以点C(ψf/Ld,0) 为中心,随着转速升高而向点C缩小的电压极限椭圆。

图1 定子电流控制轨迹Fig.1 Stator current control trajectory
电机在基速以下运行时,采用最大转矩电流比控制,即工作点在OA曲线段上。当电机在基速以上运行时,采用弱磁控制,通过负向增大id来减小主磁场,此时弱磁工作点沿着电流极限圆AD线段移动。
2 永磁同步电机FCS-MPC电流控制
2.1 预测模型
用欧拉法将式(1) 进行离散化处理后的PMSM预测模型为
式中:Ts为采样周期;上标p是预测值;id(k)、iq(k)为k时刻d、q轴的电流值;ud(k)、uq(k)为k时刻d、q轴的电压值,可由Park变换得到
式中:θ是转子的电角度。α 、β 坐 标系下的电压uα和uβ可由逆变器开关状态表1得到。

表1 逆变器开关状态表Table 1 Switching table of inverter
在微控制器实际工作时,控制算法与采样周期有2个周期的延迟时间,考虑到系统延迟对电机性能的不利影响,对系统采用延时补偿策略,由式(7)预测k+2时刻的电流为
2.2 传统代价函数
传统代价函数为
根据式(8) 预测逆变器8组开关状态下的电流值,代入式(10) 评估,传统代价函数的FCS-MPC选择代价函数最小值所对应的开关状态作为最优解,并在下一个周期输出。
由上分析可知,传统的代价函数的目标是使预测电流与给定电流的控制误差最小的点,但未考虑电机预测模型的精确,在电机运行中,电机的电感会随着磁路饱和程度而变化,电阻和永磁体磁链会随着温度而变化,在弱磁高速区,电感的耦合程度加深。这些参数的不确定会导致预测电流值与参考电流值的控制误差增大。因此,在考虑上述问题的情况下,提出采用PID型代价函数改善在弱磁控制时电机参数敏感对控制性能的影响。
2.3 PID型代价函数
其思想来自于PID控制器,控制输出是由3部分之和组成:比例控制能迅速反映误差,从而减小误差,但比例控制不能消除稳态误差;积分控制作用就不断地积累,输出控制量以消除稳态误差;微分控制能预测电流误差的趋势,对预测电流误差进行补偿。
对电流控制误差的积分项I后向差分方程为
式中:Id(k)、Iq(k)分 别为d、q轴电流误差的积分项,kI是积分增益系数。在传统代价函数中加入该积分项,在理论上电流控制误差积分项I能够彻底消除稳态误差,但在实际情况下,不可能完全消除稳态误差,只能降低系统的稳态误差。
纹波误差是由电机模型预测不准确而产生的电流变化率的预测误差所致,且该预测误差不能通过积分项I来消除。此外,由于FCS-MPC的控制量不连续,不能用传统PID中的微分项来预测,但FCSMPC的代价函数中包含预测输出值与给定值的偏差项,可采用低通滤波器函数来实现对给定值柔化,避免给定值的变化导致控制作用过于激进,系统超调大。因此,根据纹波误差的原理,将每个采样周期单位变化电流导致的预测误差作为电流控制误差的微分项的系数D,即
式中:kD为微分增益系数;LPF是低通滤波器函数。
当采用的是一阶低通滤波时,可知其LPF的差分表达式为
式中:α为滤波器系数。因此,微分项D为系数D′与预测电流变化量的乘积,即
因此,PID型代价函数为
式中:Pd(k)、Pq(k)分别为传统函数中d、q轴电流误差项,即
采用基于PID-MPC的弱磁控制系统框图如图2所示,与传统的代价函数的FCS-MPC相比,改变了代价函数的评估式和添加了虚线框里的误差代价运算部分,PID-MPC不仅保留FCS-MPC的特点,还能在参数失配时降低电流稳态和纹波误差,提高系统的参数鲁棒性。

图2 基于PID-MPC的弱磁控制系统框图Fig.2 Block diagram of flux-weakening control system based on PIDMPC
3 仿真结果分析
为了验证所提出的PID-MPC在弱磁控制中对电流控制误差的抑制作用以及提高控制系统的参数鲁棒性,在Matlab/Simulink进行仿真实验,仿真结果将与传统代价函数的FCS-MPC和PID-MPC进行比较,其中仿真模型的参数如表2所示。
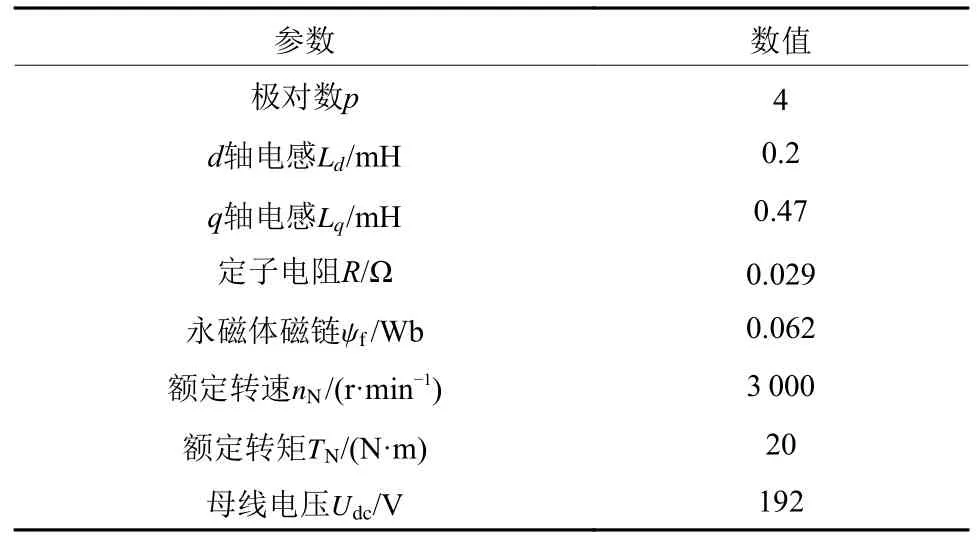
表2 仿真模型的参数Table 2 Parameters of simulation model
仿真时电机转速由0 r/min到6 000 r/min给定,负载由空载开始,在0.5 s时负载转矩由空载变成额定负载转矩20 N·m,当速度达到6 000 r/min时保持不变。对比传统代价函数的FCS-MPC和PID-MPC在永磁同步电机弱磁控制中的性能,仿真结果如图3~5所示。
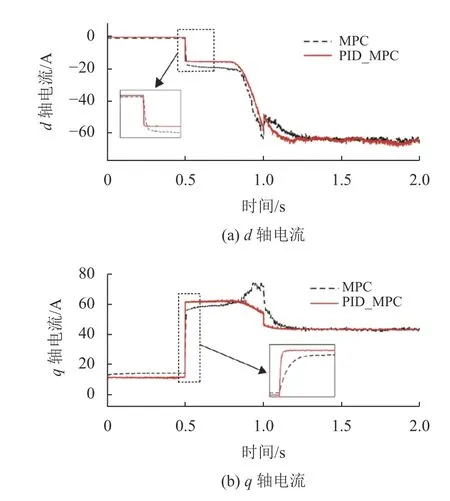
图3 d轴和q轴电流仿真结果Fig.3 Simulation results of d- and q-axis current
3.1 动态性能对比研究
PMSM控制系统的动态性能评估需要考虑3个关键方面,即稳定时间、电流超调和转矩响应速度。对基于传统代价函数FCS-MPC和PID-MPC的永磁同步电机弱磁控制进行对比仿真实验。如图3所示,在0.5 s时d-q轴电流阶跃响应结果反映了所采用的PIDMPC和传统代价函数的FCS-MPC之间的明显差异,尽管2种方案都能很好地跟踪给定电流的命令并没有超调,但PID-MPC的电流响应更快。在0.5 s时负载转矩发生突变,转矩阶跃响应的结果如图4所示,2种代价函数算法转矩都能准确跟踪给定转矩值并没有超调,但PID-MPC的转矩响应调节更快,而且转矩波动更小。如图5所示,在0.5 s时由于负载转矩突变,速度会有轻微的波动,局部放大图可以看出PIDMPC的转速波动更小。以上分析表明了PID-MPC具有快速响应的能力,并提高了系统对负载转矩扰动的鲁棒性。
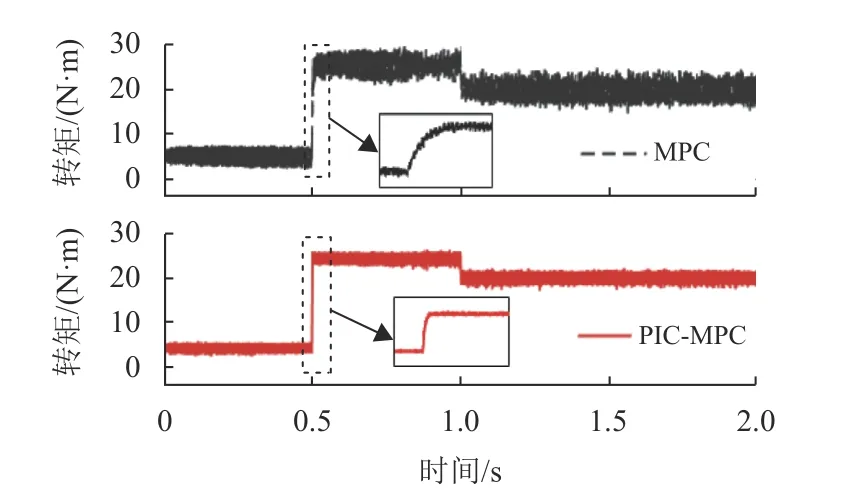
图4 转矩仿真结果Fig.4 Simulation results of torque
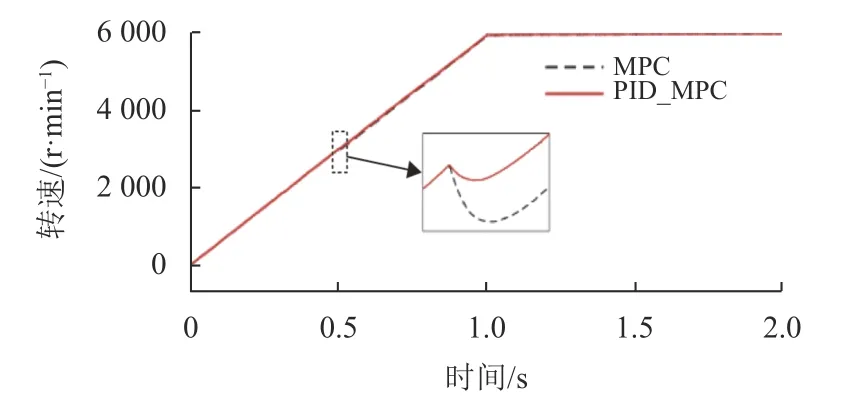
图5 转速仿真结果Fig.5 Simulation results of speed
3.2 稳态性能对比研究
为了进一步验证该算法在PMSM弱磁控制中,可以抑制电流预测误差,提高电流控制精度的作用,比较了2种控制器在6 000 r/min时的电流预测平均误差,如图6所示。传统FCS-MPC的d-q轴电流预测平均误差为1.003 5 A和0.910 3 A;PID-MPC的电流预测平均误差分别是0.523 4 A和0.502 5 A。而且传统FCSMPC的q轴电流预测误差在弱磁过程中有较大的波动。
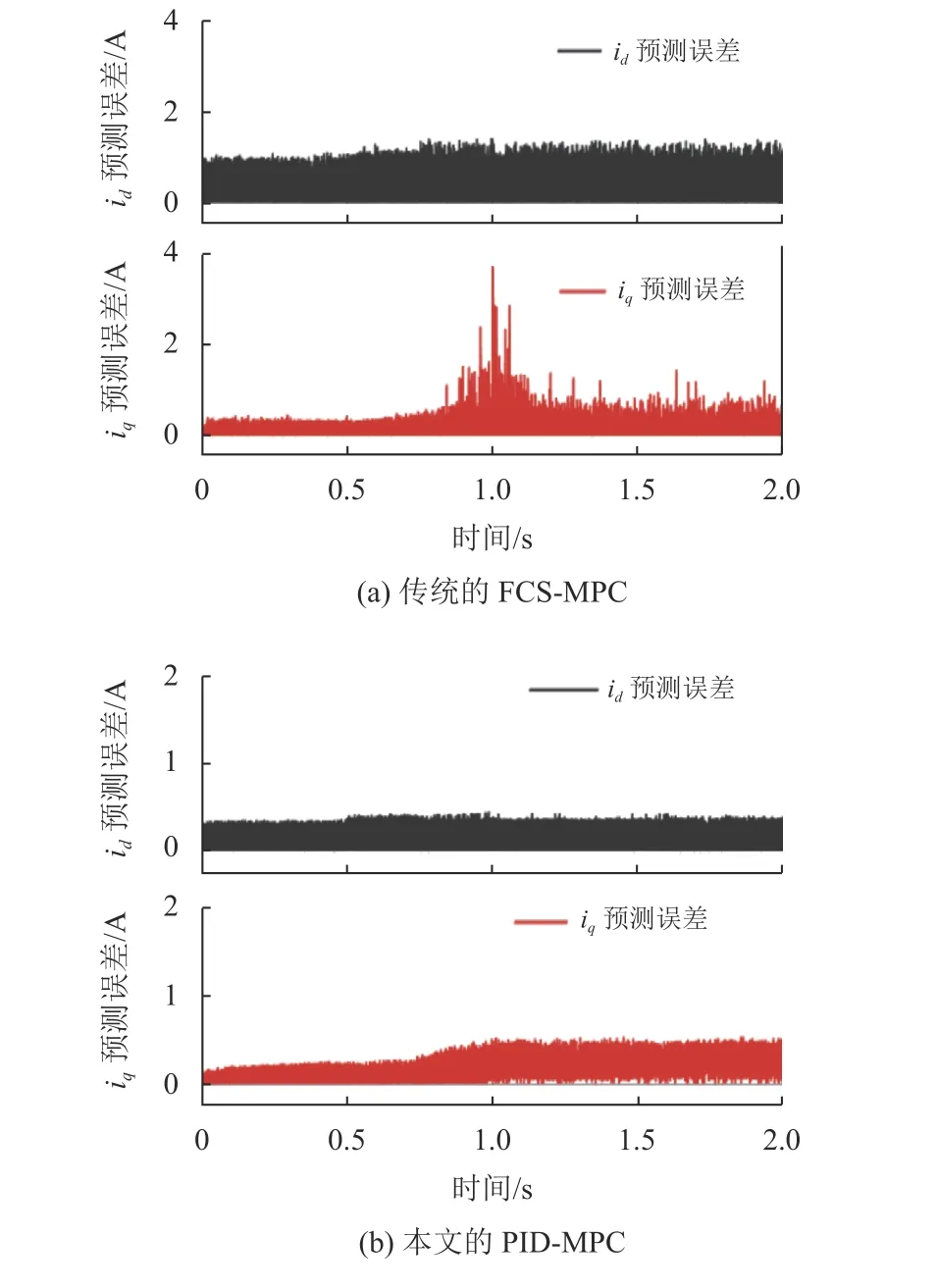
图6 q轴和d轴的电流预测误差Fig.6 q- and d-axis current predictive errors
两种方法的相电流波形如图7所示,其相电流的总谐波畸变率(Total Harmonic Distortion, THD) 分别为9.66%和8.89%。由以上分析可知PID-MPC控制器电流预测误差小,电流和转矩的波动也较小,表明PID-MPC预测模型更精确,系统的稳态性能更好。
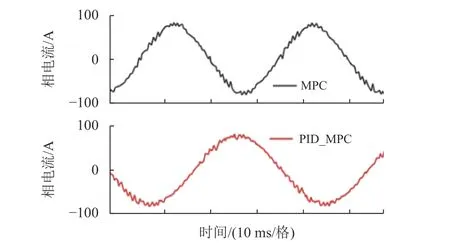
图7 相电流仿真结果Fig.7 Simulation results of phase current
3.3 参数鲁棒性对比研究
为了验证PID-MPC对电机内部参数变化具有较好的鲁棒性,对传统的代价函数FCS-MPC和PIDMPC的参数鲁棒性进行仿真实验。当电机在弱磁区运行时,内部电机参数会发生较大的变化,MPC性能影响较大的主要参数是电阻、电感和磁链,因此本节对比这3种参数分别变化时的电流控制误差。定义电流平均误差Eav和 方均根误差ERMS为
式中:Ed(k)=i∗d(k)−id(k),Eq(k)=i∗q(k)−iq(k)。
设定2 种参数为额定值,其中1 种参数在50%~150%的额定值范围内变化。如图8所示,在相同运行条件下,PID-MPC的电流控制误差Eav和ERMS都小于传统代价函数;当电阻参数不匹配时,2种控制器电流控制误差没有明显变化,表明都对电阻参数有较好的鲁棒性;当电感和磁链参数不匹配时,随着参数不匹配程度增大,传统代价函数MPC的电流控制误差增大明显,而PID-MPC对电感和磁链参数变化不敏感。以上分析说明,PID-MPC在永磁同步电机弱磁控制中对电感、磁链和电阻参数都具有较好的鲁棒性,具有较小的电流控制误差。
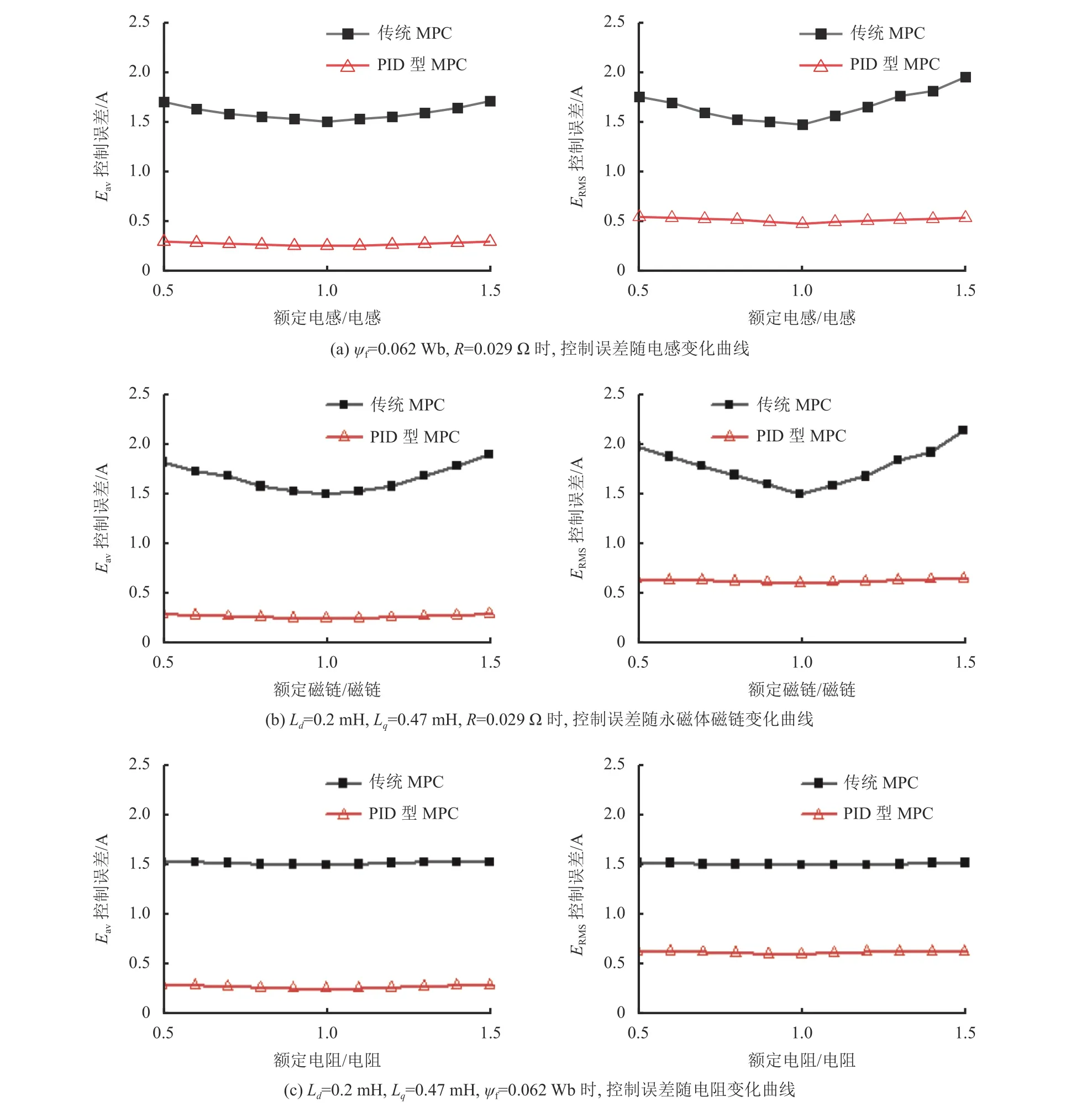
图8 传统的MPC与PID-MPC的平均控制误差 Eav和 方均根控制误差E RMS随模型参数变化曲线Fig.8 Mean and RMS control error of traditional MPC and PID-MPC with parameter variations
4 结论
本文将PID-MPC应用在PMSM弱磁控制中,解决基于传统代价函数的FCS-MPC策略参数敏感性问题。PID型代价函数在传统代价函数基础上,通过增加积分误差代价降低稳态电流控制误差,增加微分误差代价抑制纹波电流误差,提高系统的参数鲁棒性。仿真结果证明,基于PID-MPC的PMSM调速系统具有良好动态性能和比传统代价函数FCS-MPC更优的参数鲁棒性,适用于电动汽车宽转速范围运行。
