基于3种不同颜色空间的作物行提取方法比较研究
2023-06-17张秀丽周湘铭赵任重陈永周培林
张秀丽 周湘铭 赵任重 陈永 周培林


摘要:作物行检测是精准农业和自动导航的关键。为研究不同颜色空间作物行提取方法克服光照条件变化影响的性能,综合比较不同方法的优劣情况,选取归一化RGB颜色空间提取ExG分量方法(ExG分量法)、HSV颜色空间提取H分量方法(H分量法)、CIE-Lab颜色空间提取a分量方法(a分量法)3种方法,分别在阴天和晴天2种光照条件下进行了详细分析和比较。结果表明,ExG分量法和a分量法在阴天和晴天环境都具有可行性且基本能够满足实际需求;H分量法仅在阴天环境下具有可行性且基本能够满足实际需求,在晴天环境下无法完全准确分离作物和土壤。分析得出,阴天环境下综合比较优劣结果为a分量法>H分量法>ExG分量法,晴天环境下综合比较优劣结果为a分量法>ExG分量法。
关键词:RGB;HSV;CIE-Lab;OTSU算法;作物行识别;机器视觉
中图分类号:TP391.41文献标志码:A
文章编号:1002-1302(2023)10-0211-08
农业机械自动导航是精准农业应用的热门核心技术之一[1-2],是实现精准农业的基础。定位测姿信息采集是农业机械自动导航首要解决的问题,其输出的信息具有准确性和可靠性,是农业机械实现自动导航的前提条件。在信息采集过程中,虽然非结构化环境容易对视觉导航传感器产生各类负面影响,但是相对于全球导航卫星系统(GNSS)导航技术,机器视觉导航技术具有成本低、时效性好、可处理信息丰富和扩展性强等特点[3-4]。
作物行识别和定位是农机田间自动沿作物行导航的核心技术之一,作物行提取是农机视觉导航的重要环节。田间图像灰度化是图像处理领域研究中的热门问题。灰度化的作用是将作物和背景初步分离,强调作物在图像上的区域,弱化图像的其他部分。灰度化效果决定了后续图像处理的质量。国内外学者在田间图像灰度化方面做了大量研究,Bakker等对RGB颜色空间归一化后提取甜菜田间图像的超绿分量[5]。José等在玉米苗图像内提取RGB颜色空间的超绿特征[6]。杨洋等对RGB颜色空间进行归一化后,采用过绿算法和最大类间方差法分割玉米与背景[7]。何洁等使用RGB颜色空间的G-R分量分割绿色农作物和土壤背景[8]。杨玲香等通过归一化2g-r-b算法对农作物进行灰度化[9]。刁智华等选用RGB颜色空间,提取超绿颜色特征,将正常的叶片及其阴影部分和感染病害的叶片分离[10]。李祥光等选用HSV颜色空间,通过限定H、S、V分量的取值范围对玉米行进行提取[11]。高国琴等选用HIS颜色空间,通过提取与光照无关的色调H分量对作物进行信息提取[12]。Meng等探究了绿植图像HIS颜色空间中H分量的分布,建立了颜色空间H值数据庫,并基于H分量的阈值对绿植图像进行二值化[13]。陈子文等提取了CIE-Lab颜色空间中的a分量对绿色像素进行区分,使用a分量对蔬菜作物行进行提取[14]。Bai等在作物提取过程中引入了粒子群优化和Lab空间中的形态学模型[15]。王爱臣等提取Lab颜色空间中a、b双颜色分量,使用最大熵法选取最优阈值进行图像分割[16]。
作物行特征与背景土壤在颜色上有明显的差异,直接以颜色作为提取依据是主要的作物行提取方式,但是农机作业田间的光照环境复杂,阴影分布、光照度等光照不稳定引发的因素会让颜色分离变得复杂。因此,目前作物行提取的相关研究都重视如何减少光照因素对处理过程的影响。目前,可以克服不同光照条件影响的作物行提取方法主要有以下2点区别:(1)选择的颜色空间不相同;(2)在同一颜色空间中,对灰度分量的选择或处理方式不相同。大多数研究在同一颜色空间对不同的灰度分量的选择或处理方式进行探究后,仅作出定性可行性结论,目前对具有克服光照条件变化影响能力的多种颜色空间灰度化方法进行定性和定量分析的研究尚未见报道。本研究在分析和总结3种不同颜色空间的作物行提取方法原理的基础上,将每种方法分别进行颜色空间转换、灰度化和二值化分析,得出分别对应3种方法的适用条件,旨在为各类不同侧重方向的作物行中心线提取研究提供参考依据。
1材料与方法
1.1数据采集
图像采集设备采用CMOS机器视觉摄像头,相机距离垄沟面高度1.3m,倾斜角度30°。数据采集时间为2021年1月27日,地点位于海南省五指山市番阳镇洪吐村(109.412198°E,18.883121°N),田间土壤类型为沙壤土,作物品种为古引4号雪茄烟。分别采集阴天和晴天环境的田间作物行视频,视频帧率为30帧/s。阴天环境的视频采集时间为作物移栽后第18天,晴天环境的视频采集时间为作物移栽后第19天。分别在阴天和晴天环境下测量3次光照度并求其平均值,所用仪器为希玛AS803光照度计;阴天环境的光照度平均值为2329lx,晴天环境的光照度平均值为20230lx。分别从2种光照条件视频中提取各40张图像样本,共80张图像样本,图像分辨率为960像素×544像素,为表述方便,下文中称2种光照条件图像样本。图像处理采用IntelCorei7-8700处理器(主频3.20GHz),8GB内存,编程语言采用Python3.10.5开发,代码编译器为VisualStudioCode,程序运行操作系统为Windows10。
1.2作物行提取方法
本研究以相同的步骤,分别运用3种不同方法提取作物行特征,步骤顺序为颜色空间转换、灰度化、二值化,最终可以得到二值图像。二值图像分为目标和背景2个独立的部分,在二值图像的基础上可以进一步完成作物行中心线提取工作。颜色空间转换的作用是为灰度化做数据准备,且在该过程中可以对光照信息进行处理。灰度化的作用是提取作物行的基本轮廓并为二值化创造有利条件,本研究二值化的主要作用是评价3种灰度化方法所得的二值图像的质量。二值化算法按照处理过程中的阈值是否变化,分为全局阈值二值化和局部阈值二值化;相对于局部阈值二值化,全局阈值二值化具备实现简单、性能稳定、无需考虑图像空间信息等诸多优势,其中OTSU算法(最大类间方差算法)和最大熵阈值算法被广泛用于寻找图像的最佳全局阈值[17]。OTSU算法主要通过计算最大类间方差,自动确定最佳全局分割阈值,计算过程不需要对数据进行训练学习,广泛应用于各类作物特征的图像处理研究[18-19]。本研究选取OTSU算法作为图像二值化算法。
1.3灰度化研究方法原理
颜色空间是由描述颜色的若干分量所构成的多维空间。现有用于作物识别研究使用的颜色空间有归一化RGB[7]、HSV[11]、HSI[12]、CIE-Lab[14],图像颜色空间的选择决定了灰度化的方法和结果。
1.3.1归一化RGB颜色空间提取ExG分量方法现有绝大多数视觉导航所使用的相机都将所采集的图像以RGB颜色空间的形式存储于图像文件中,直接采用RGB颜色空间进行数据处理是一种方便快捷的方式。RGB颜色空间是R、G、B这3种基本色进行不同程度的叠加,产生不同的颜色。RGB颜色空间的3个分量没有直接对亮度信息表征,因此RGB颜色空间对光照变化很敏感,很容易受到光照变化的影响,这对图像处理将产生极大的影响。针对以上问题,对RGB颜色空间进行图像归一化处理,能够有效减少光照度差异对作物识别的影响[20],归一化RGB颜色空间的3个分量计算方式如式(1)所示。
b=B/(B+G+R)
g=G/(B+G+R)
r=R/(B+G+R)。(1)
式中:b、g、r分别为颜色分量B、G、R的归一化值,由b、g、r构成新的归一化RGB颜色空间。RGB颜色空间提取绿色特征的灰度化方法主要使用植被指数提取法,该方法主要通过对b、g、r进行组合运算实现,主要的植被指数有超绿指数ExG[21]、优化超绿指数improvedExG[20]、超绿超红差分指数ExGR[22]、植被指数组合COM[23]等,其中ExG运用最为广泛。本研究采用ExG进行研究,ExG分量计算方法如式(2)所示。
ExG=2g-r-b。(2)
1.3.2HSV顏色空间提取H分量HSV与HSI是2种非常相似的颜色空间。H、S分别表示色调、饱和度分量;H分量定义颜色本身,是颜色的一个重要属性;S分量表示色相与中性灰色的差别程度。两者不同之处是亮度分量(V或I分量)的定义和计算不同,2种颜色空间都将亮度信息独立储存,并且广泛运用于各类农业机器视觉技术。色调H分量是由物体表面的反射率决定的,其值唯一,且H分量的灰度图像中,作物区域凸显性很好。H分量法的具体做法是,直接提取HSV颜色空间或者HIS颜色空间的H分量灰度图像,作为作物行特征的灰度图像。鉴于2种颜色空间有相似性,为了简化研究,本研究只对HSV颜色空间的H分量进行探究。
1.3.3CIE-Lab颜色空间提取a分量CIE-Lab颜色空间的L分量代表亮度;a、b分量代表色度,反映了颜色的色调和饱和度;其中a分量对绿色信息敏感。该颜色空间是独立于设备的色彩空间,不受外源光照的影响,是设备之间颜色信息的交流桥梁;色彩信息和灰度信息易于清晰获得,且该颜色空间被设置为欧氏距离,欧氏距离越小,体现为人体视觉颜色差异越小。a分量法的具体做法是直接提取a分量灰度图像,作为作物行特征的灰度图像[14]。
2结果与分析
2.1颜色空间转换时效性比较
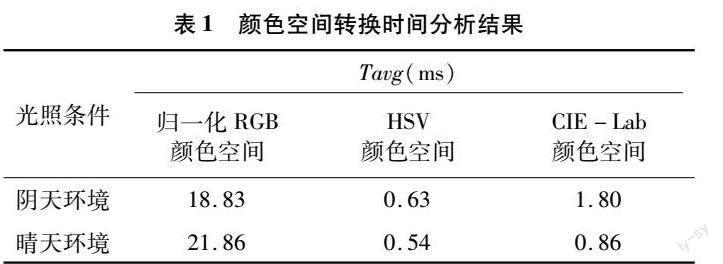
为了叙述方便,在本节及后续章节中将归一化RGB颜色空间提取ExG分量方法称作ExG分量法;HSV颜色空间提取H分量方法称作H分量法;CIE-Lab颜色空间提取a分量方法称作a分量法。归一化RGB、HSV、CIE-Lab颜色空间均需要以RGB数据为基础,进行颜色空间转换得到,因此三者转换过程对作物行提取算法的时效性有一定的影响。分别将2种光照条件图像样本的颜色空间转换至归一化RGB、HSV、CIE-Lab颜色空间,对单张图像进行3次转换试验,并统计每张图像每次转换过程占用CPU的时间,即每种方法对每种光照条件的图像样本进行120次转换试验。颜色空间转换方式主要通过矩阵运算方法转换,3种颜色空间转换时间分析结果如表1所示,其中Tavg为颜色空间转换时间平均值,单位为ms。
可见归一化RGB颜色空间的Tavg远大于其他2种方法,HSV和CIE-Lab颜色空间的Tavg最大相差不足1.3ms,且均小于2ms,HSV颜色空间的时效性略优于CIE-Lab。参照陈子文等的时效性试验结果[14,24-25],HSV和CIE-Lab颜色空间转换过程相对于作物行识别整体过程的时效性影响有限,转换时间可以忽略不记。相对于杨洋等的研究,作物行识别整体过程耗时97.56ms[7],归一化RGB颜色空间转换过程时效性不足。3种颜色空间时效性优劣关系为HSV>CIE-Lab>归一化RGB。由于ExG方法还需要在归一化RGB颜色空间的基础上对ExG分量进行计算,计算工作量在原来基础上会进一步加大;而H方法和a方法是直接提取单分量便完成灰度化,计算工作量相对于ExG分量法较小。由3种颜色空间时效性的优劣关系,可得到对应3种方法的优劣关系:H分量法>a分量法>ExG分量法。
2.2颜色空间克服光照条件变化影响能力比较
从田间环境可以发现,田间环境主要颜色特征有作物和土壤。在2种光照条件图像样本中,每幅图像提取20个作物和土壤测试点,进行RGB、归一化RGB、HSV、CIE-Lab颜色空间颜色分量值统计分析。HSV、CIE-Lab颜色空间各分量的取值范围均量化为[0,255],为与其他文献作比较,归一化RGB颜色空间各分量的取值保持原有范围。
每个颜色模型的各分量变化程度使用单个分量相对变化率表征,计算方法如式(3)所示:
δ=(x2-x1)/x1。(3)
式中:δ为单个分量相对变化率;x1为晴天环境下的单个分量值;x2为阴天环境下的单个分量值。
2种图像样本颜色模型的各分量总体变化程度使用单个分量平均相对变化率表征,计算方法如式(4)所示:
Δ=(δleaf+δsoil)/2。(4)
式中:δleaf、δsoil分别为叶片、土壤的单个分量相对变化率,由式(3)计算得出;Δ为单个分量平均相对变化率。2种光照条件下各颜色空间颜色分量值的统计分析结果如图1-A~H所示,颜色分量平均相对变化率统计结果如图1-I所示。
RGB颜色空间的b、g、r值平均相对变化率的平均值avg1=0.3308,归一化RGB颜色空间的B、G、R值平均相对变化率的平均值avg2=0.0631,H值的平均相对变化率ΔH=0.2353,a值的平均相对变化率Δa=0.0394,四者关系为:Δa (1)RGB颜色空间:该颜色空间下的图像为原始图像,没有对光照因素进行处理。在晴天和阴天环境下,RGB颜色空间的B、G、R值变化显著,以avg1为参照值,当其他颜色空间的对照值小于avg1时,判定为具有克服光照条件变化的影响能力。 (2)归一化RGB颜色空间:图像经过RGB颜色空间颜色分量归一化处理后avg2<avg1,光照条件发生变化时,归一化RGB颜色空间的b、g、r3值变化程度降低。通过对颜色分量归一化处理,确保不同光照条件下颜色分量变化规律相同,该结论与杨洋等的研究结论[7]一致。 (3)HSV颜色空间:在光照条件发生变化时,ΔH>avg1,H分量法能够减少光照变化影响,但是ΔH>Δa,减少光照变化影响的能力不如ExG分量法和a分量法。 (4)CIE-Lab颜色空间:在光照条件发生变化时,Δa<avg2<ΔH<avg1,a分量法能够减少光照变化影响,且与ExG分量法和H分量法比较,三者之间a分量法效果最佳。 3种方法的对应评价指标均小于avg1,3种颜色空间对应的灰度化方法均可以减少光照变化影响,但是3种颜色空间克服光照条件变化影響能力有一定的差异,由优到劣的顺序是:a分量法>ExG分量法>H分量法。 2.3直方图分析和二值化比较 分别从2种光照条件图像样本中随机选取1幅原始图像进行灰度化和二值化探究(图2)。分别使用3种方法对阴天环境和晴天环境的原始图像进行灰度化后,再分别对得到的灰度图像进行二值化,过程中对3种方法的灰度图像提取对应的灰度直方图(简称为直方图),直方图灰度分布呈现双峰现象越明显越有利于二值化。为方便比较,此处将CIE-Lab颜色空间各分量的取值范围亦均量化为[0,255]。上述过程所得图像如图3、图4所示。 由图3-A、图4-A的ExG分量法灰度图像和图3-B、图4-B的H分量法灰度图像可知,作物特征在灰度图像中呈现高亮区域,因此ExG和H分量法的二值化方法如式(5)所示: 由图3-C、图4-C的a分量法灰度图像可知,作物特征在灰度图像中呈现暗淡区域,因此a分量法的二值化方法见式(6): 式中:I1、I2为对应灰度图像任意一点P(x,y)的灰度值,最佳阈值threshold1、threshold2是二值化最佳阈值,该阈值可以使得灰度图像中所有像素的类间方差最大。当B1=0或B2=0时,P(x,y)为背景点(黑色);当B1=255或B2=255,P(x,y)为目标点(白色)。在图像中,背景点为土壤,目标点定为作物行特征或噪点,二值化最佳阈值按照以上原理可以将直方图划分为2个部分灰度值范围,2个部分灰度值范围的像素点对应二值图像中白色区域或黑色区域内的像素点。2种环境3种方法的二值化结果如图3-G~I、图4-G~I所示。定性分析,2种光照条件的二值图像中,除了图4-H的晴天环境H分量法二值图像无法分离作物和土壤,其他二值图像都可以得到作物行轮廓清晰的二值图像,可以基本能够满足实际需求。 直方图存在双峰现象越明显,其对应灰度化方法的地物区分性能越强[26]。以下对阴天环境和晴天环境3种方法的直方图进行分析。 阴天环境下,如图3-E、F所示,H分量法和a分量法在直方图呈现双峰现象。ExG分量法的直方图双峰现象虽然不明显,但是仍然可见(图3-D)。结合图3-G,二值化仍然可以将作物行和土壤有效分离。因此,阴天环境下3种方法对应生成的直方图都为双峰直方图;ExG分量法直方图呈现的双峰现象并不是特别明显,在极端情况下有可能难以区分土壤和作物;其余2种方法的直方图呈现双峰现象明显。因此,阴天环境下,地物区分性能由强到弱关系顺序为H分量法=a分量法>ExG分量法。 在晴天环境下,ExG分量法的直方图双峰现象虽然不明显,但是仍然可见(图4-D)。结合图4-G,二值化仍然可以将作物行和土壤有效分离。ExG分量法的直方图呈现双峰现象并不明显,相对较难区分土壤和作物。H分量法直方图总体上呈现 多峰现象和刺峰现象,二值化算法难以找到合适的阈值将土壤和作物分离,地物区分性能相对较差(图4-E)。a分量法直方图呈现双峰现象,容易进行土壤和作物区分(图4-F)。晴天环境下,地物区分性能由强到弱关系顺序为a分量法>ExG分量法>H分量法。 综上可知,a分量法在2种条件下都具有很好的地物区分性能;ExG分量法次之;H分量法的地物区分性能具有不稳定性,在阴天环境下容易将作物行和土壤有效分离,而晴天环境下则不能有效分离。 结合图2-B、图4-B、E、H对晴天环境H分量法的异常原因进行分析。图4-H中,二值图像高亮区域实际上是作物行与土壤阴影区域的并集,再结合图4-E直方图分析,可推断晴天环境下H分量法失效的原因是,图2-B中的作物行与土壤阴影区域对应的灰度值范围,同属以threshold1划分成的2个部分灰度值范围的同一部分,threshold1数值见图4-E虚线标注,导致OTSU算法将作物行和土壤阴影区域都划分成一块区域。对比无大量阴影的阴天环境,可见H分量法对于有大量阴影的晴天环境适应性不强。因此,运用OTSU算法对灰度图像进行二值化时,H分量法的场景适应能力比ExG、a分量法差。H分量法对阴天环境的作物行特征可以有效提取,但是对晴天环境的作物行特征不能有效提取;ExG、a分量法在2种环境下都可以有效提取图像的作物行特征。 最理想的二值图像应该没有噪点,噪点越少越有利于提高作物行检测的精度和降低后续过程的计算量。在二值图像内,噪点一般以小面积的孤立连通区域存在,所以可将小面积的孤立连通区域识别为图像内的噪点。 定性角度分析来看,结合图3-G~I判断,阴天环境下,a分量法生成的二值图像噪点相对于其他2种较少,H分量法比ExG分量法的二值图像噪点少。结合图4-G~I判断,晴天环境下,在异常的H分量法二值图像不参与比较的条件下,a分量法生成的二值图像噪点数量和总面积相对于ExG分量法少。 从定量角度验证,定义小于50像素的孤立连通区域为噪点区域,选取2种光照条件图像样本,对所 得阴天和晴天环境下的3种方法二值图像,分别统计面积小于50像素的噪点连通区域数量和总面积,并计算对应的平均值、最大值、最小值,图像噪点分析结果如图5所示。连通区域数量反映二值图像内噪点的数量,噪点连通区域总面积各指标反映噪点在图像内的总面积。2种光照条件下,ExG分量法二值图像的噪点数量和总面积各指标远大于H分量法和a分量法;在排除异常的晴天环境H分量法数据的情况下,H分量法和a分量法生成的图像噪点数量各项数据相近,但是a分量法各项指标均小于或等于H分量法,a分量法稍占优势。因此,a分量法可以最大程度地减少图像噪点生成,其次是H分量法,但与前者相差不大,最后是ExG分量法。 3讨论与结论 本研究首先介绍了3种不同颜色空间的具有克服光照条件变化影响能力的作物行提取方法的原理,然后分别以颜色空间转换、灰度化、二值化的步 骤,实际运用3种方法对田间作物行特征进行提取,并对结果进行了详细的分析和比较。 分析结果表明,ExG分量法和a分量法在阴天和晴天环境都具有可行性,且都基本能够满足实际需求。H分量法仅在阴天环境下具有可行性且基本能够满足实际需求,在晴天环境下无法准确分离作物和土壤。三者在性能上有一定的差异:H分量法和a分量法在时效性方面均优于ExG分量法,H分量法的时效性指标仅胜于a分量法不足1.3ms。a分量法和ExG分量法克服光照条件变化影响的能力均远优于H分量法,a分量法克服光照条件变化影响的能力胜于ExG分量法。a分量法在2种光照条件下都具有很好的地物区分性能;ExG分量法次之;而H分量法的地物区分性能不稳定且场景适应能力相对不足,在阴天环境下可将作物行和土壤有效分离,而晴天环境下则不能,原因在于晴天环境阴影过多。a分量法的抗噪能力略胜于H分量法,ExG分量法相对前二者较弱。根据以上结论,归纳总结出3种方法的适用条件如下。 (1)识别环境为光照均匀的阴天环境。当算法侧重于时效性要求,时效性要求在小于10ms级别时,可选择H分量法;时效性要求在10~100ms级别时,可选择a分量法和H分量法;时效性要求在100ms以上级别时,3种方法均可选择。当算法侧重于克服光照条件变化影响的能力要求时,可以优先选择a分量法,其次是ExG分量法,最后是H分量法。当算法侧重于图像质量要求时:可以优先选择a分量法,其次是H分量法,最后是ExG分量法。由于在实际作物行检测过程中,算法需要适应各种实际田间条件和要求,因此作物行提取算法需要在综合考虑多种影响算法性能的基础上来编写。阴天环境下,综合比较结果为a分量法>H分量法>ExG分量法。 (2)识别环境为光照不均匀的晴天环境。H分量法无法分离作物和土壤,a分量法和ExG分量法则可以正常分离。时效性要求、光照条件变化影响能力要求和图像质量要求的选择次序为对应阴天环境下去除H分量法时的选择次序。晴天环境下,综合比较结果为a分量法>ExG分量法。 参考文献: [1]BoursianisAD,PapadopoulouMS,DiamantoulakisP,etal.InternetofThings(IoT)andAgriculturalUnmannedAerialVehicles(UAVs)insmartfarming:acomprehensivereview[J].InternetofThings,2022,18:100187. [2]胡靜涛,高雷,白晓平,等.农业机械自动导航技术研究进展[J].农业工程学报,2015,31(10):1-10. [3]余晓兰,万云,陈靖照.基于双目视觉的机器人定位与导航算法[J].江苏农业科学,2022,50(6):154-161. [4]张漫,季宇寒,李世超,等.农业机械导航技术研究进展[J].农业机械学报,2020,51(4):1-18. [5]BakkerT,WoutersH,vanAsseltK,etal.Avisionbasedrowdetectionsystemforsugarbeet[J].ComputersandElectronicsinAgriculture,2008,60(1):87-95. [6]Bengochea-GuevaraJM,Conesa-MuozJ,AndújarD,etal.MergefuzzyvisualservoingandGPS-basedplanningtoobtainapropernavigationbehaviorforasmallcrop-inspectionrobot[J].Sensors(Basel,Switzerland),2016,16(3):276. [7]杨洋,张博立,查家翼,等.玉米行间导航线实时提取[J].农业工程学报,2020,36(12):162-171. [8]何洁,孟庆宽,张漫,等.基于边缘检测与扫描滤波的农机导航基准线提取方法[J].农业机械学报,2014,45(增刊1):265-270. [9]杨玲香,王田田,何旭.基于随机抽样一致性算法(RANSAC)的农作物行提取[J].江苏农业科学,2017,45(2):195-197. [10]刁智华,刁春迎,魏玉泉,等.机器人系统中小麦病害识别与施药算法研究[J].江苏农业科学,2017,45(17):192-195. [11]李祥光,赵伟,赵雷雷.缺株玉米行中心线提取算法研究[J].农业工程学报,2021,37(18):203-210. [12]高国琴,李明.基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7):25-33. [13]MengQK,QiuRC,HeJ,etal.Developmentofagriculturalimplementsystembasedonmachinevisionandfuzzycontrol[J].ComputersandElectronicsinAgriculture,2015,112:128-138. [14]陈子文,李伟,张文强,等.基于自动Hough变换累加阈值的蔬菜作物行提取方法研究[J].农业工程学报,2019,35(22):314-322. [15]BaiXD,CaoZG,WangY,etal.CropsegmentationfromimagesbymorphologymodelingintheCIEL*a*b*colorspace[J].ComputersandElectronicsinAgriculture,2013,99:21-34. [16]王爱臣,张敏,刘青山,等.基于区域生长均值漂移聚类的苗期作物行提取方法[J].农业工程学报,2021,37(19):202-210. [17]FanYX,ChenYY,ChenX,etal.Estimatingtheaquatic-plantareaonapondsurfaceusingahue-saturation-componentcombinationandanimprovedOtsumethod[J].ComputersandElectronicsinAgriculture,2021,188:106372. [18]XuBR,ChaiL,ZhangCL.ResearchandapplicationoncorncropidentificationandpositioningmethodbasedonMachinevision[J].InformationProcessinginAgriculture,2023,10(1):106-113. [19]JiangGQ,WangZH,LiuHM.Automaticdetectionofcroprowsbasedonmulti-ROIs[J].ExpertSystemsWithApplications,2015,42(5):2429-2441. [20]ZhouY,YangY,ZhangBL,etal.Autonomousdetectionofcroprowsbasedonadaptivemulti-ROIinmaizefields[J].InternationalJournalofAgriculturalandBiologicalEngineering, 2021,14(3):217-225. [21]胡煉,罗锡文,曾山,等.基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报,2013,29(10):12-18. [22]MeyerGE,NetoJC.Verificationofcolorvegetationindicesforautomatedcropimagingapplications[J].ComputersandElectronicsinAgriculture,2008,63(2):282-293. [23]GuerreroJM,GuijarroM,MontalvoM,etal.Automaticexpertsystembasedonimagesforaccuracycroprowdetectioninmaizefields[J].ExpertSystemsWithApplications,2013,40(2):656-664. [24]刁智华,吴贝贝,毋媛媛,等.基于最大正方形的玉米作物行骨架提取算法[J].农业工程学报,2015,31(23):168-172. [25]孟庆宽,张漫,杨耿煌,等.自然光照下基于粒子群算法的农业机械导航路径识别[J].农业机械学报,2016,47(6):11-20. [26]高永刚,林悦欢,温小乐,等.基于无人机影像的可见光波段植被信息识别[J].农业工程学报,2020,36(3):178-189.