用于海洋拖曳系统的吸光度传感器设计与研制
2023-06-16薛庆生郝锡杰王福鹏
薛庆生,郝锡杰,王福鹏
(中国海洋大学 信息科学与工程学部 物理与光电工程学院, 青岛 266100)
0 引言
海水固有光学特性的测量通过主动方式进行,只与海水自身的物理性质和光学特性有关,与环境光场无关,包含光束吸收系数、散射系数和衰减系数等[1]。吸光度是描述海水光学特性的一个重要参量,是指一束平行光线通过海水前的入射光强度V0与该光线通过海水后的透射光强度V1比值的以10 为底的对数,即A=lg (V0/V1)=lg (1/T)(T为光束透过率),吸光度可以直接反映海水的透明度及海水对光的衰减程度,属于水体固有光学性质的一种[2]。研究发现,纯水对红光吸收最强,随波长增大吸收也有增强,蓝绿光在纯水中的穿透性最强,而近紫外光在纯水中几乎不存在吸收带。海水吸光度受到水中物质浓度的影响,包含水中浮游植物、溶解有机物、悬浮粒子等[3-6],通过测试海水相对于超纯水的吸光度,可以反映出海水中微粒的组成分布情况,因此海水吸光度测量可用于水质监测、分析海水物质的组成成分和含量。海水吸光度结果对于水下光通信、光谱探测等领域具有重要指导作用[7-10],透明度信息对于潜艇的安全航行、水雷布防等均具有极大的参考价值[2,11-14]。
目前,针对海水原位吸光度测试的设备主要集中于美国海鸟公司和HOBI Labs 生产的相关水质测量传感器[15-17],其中较有代表性的为海鸟公司的C-Star 透射计,C-Rover 透射计及AC-S 高光谱吸收衰减测量仪,HOBI Labs 公司的产品主要有a-Sphere 原位分光光度计及Gamma 系列光衰减测量仪,其中a-Sphere 原位分光光度计是基于积分球原理设计的。除此之外,德国Trios 公司的也提供了一种可用于原位吸光度测量的传感器VIPER[18-19]。国内从20 世纪80年代起逐渐开始进行海洋探测设备的研究,关于海水吸光度的研究也比较少,大多数研究仍是基于实验室环境进行的模拟仿真测试,还未发展出可实际用于原位测量的吸光度传感器,目前已知的相关仪器有单通道激光衰减测量仪和基于双光路原理的海水IOPs 高光谱测量仪[20-25]。
目前海洋原位剖面观测的实现方法大都基于定点式浮标、潜标或船基观测平台,定点式剖面观测无法进行大范围水域的性质探测,以定点式测量数据代表某个区域海水的整体性质会有较大误差。拖曳式观测系统在拖曳链上分布多个传感器模块,通过走航式连续观测,实现对测试海域海水性质的原位立体剖面探测。
为获取高时空分辨率的吸光度现场测量数据,现有设备无法满足测量需求,主要原因有:1)现有吸光度设备可测量光谱信息较少,如:C-Star 透射计、单通道激光衰减测量仪等,由于海水中的粒子对不同波段光的衰减程度不同,不同波段光的衰减程度可以反映海水粒子的浓度,从多光谱的吸光度信息可以提取物质的浓度特征,若要实现多波段测量,传感器所需要的体积和功耗也将成倍增加,不利于系统集成;2)现有高光谱型的吸光度测量设备价格昂贵、体积较大,如AC-S 高光谱吸收衰减测量仪、VIPER 测量仪等,使用光谱仪作为传感器的光电探测器,一定程度上可以实现宽波段探测及较高的光谱分辨率,但光谱仪受环境光影响较大,且光谱仪外观固定,不利于传感器的集成和小型化;使用光谱仪作为光电探测器还需考虑光源的选择,例如氙灯、钨灯或使用高集成的拼接LED。综上所述,现有设备在仪器价格、系统集成及功耗等方面均不适用于海洋拖曳观测系统,无法实现高分辨率的吸光度原位探测。
为适应海洋拖曳观测系统需要,基于拖曳系统的吸光度传感器需具备多波段、低功耗、高集成度、可进行大范围长时间测量等特点。本文设计了一种用于海洋拖曳观测系统的吸光度传感器,通过搭载科考船,利用走航观测方式,实现海洋吸光度的大范围探测。
1 吸光度传感器设计原理
为实现低功耗、小体积、高精度的用于拖曳观测系统吸光度传感器,选取LED 和光电二极管分别作为传感器的光源和探测器,二者从体积、功耗、寿命等方面具有较高的性价比;吸光度传感器包含高稳定性光源模块和高信噪比信号探测模块,为实现多波段吸光度测量,选取LED 作为吸光度传感器的光源,接收端选取对应波段的窄带滤光片,8 个通道采取相同的光机结构并排排列,实现传感器的高集成度。
单个通道的具体实现原理如图1 所示。LED 光源经小孔光阑后由发射端准直透镜组准直后从发射端窗口出射,通过海水介质后,再依次经过接收端窗口、带通滤光片最后由聚焦透镜聚焦在接收端探测器靶面上。LED 采用781.25 Hz 的正弦波调制发光,以此来减小电路中1/f噪声的干扰;在发射端LED 光源侧面经带通滤光片后放置贴片式参考探测器,监测LED 发光强度变化,以此来校准光源波动对吸光度结果的影响;接收端探测器接收模拟信号经跨阻放大、带通滤波电路进入AD 采集,信号通过单片机进行数字锁相处理,通过与高截止深度的窄带滤光片配合实现对背景干扰光的抑制,以此来实现明场环境下的高精度吸光度探测。
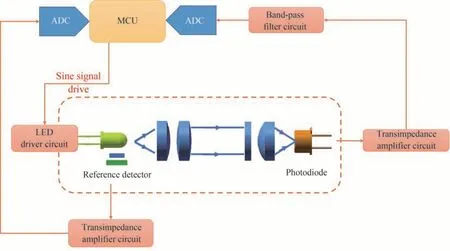
图1 单通道吸光度检测原理图Fig.1 Schematic diagram of single channel absorbance detection
1.1 吸光度检测原理
吸光度测量的基本原理为朗伯-比尔定律[24],吸光度测量系统包含高稳定光源模块及高信噪比信号探测模块。原位测量系统一般包括透射式光路和反射式光路,透射式光路的特点是光源发射端和探测器接收端在吸收池的两侧,发射端光源发出准直光束,经过吸收池吸收后,接收端会聚接收至探测器,多用于吸收光程较短的吸光度传感器;反射式光路的特点是光源发射端和探测器接收端位于吸收池的同一侧,光源发射端发出准直光束,经过吸收池,然后经过棱镜组件两次反射,再次经过吸收池,然后接收端会聚接收至探测器,由于光束两次经过吸收池,吸收光程长度为吸收池长度的2 倍[26],反射式光路多用于长光程(通常光程长度大于100 mm)吸光度传感器,由于光束两次经过吸收池,所以反射式光路可以减小长光程吸光度传感器长度,从而以较小的体积实现长路径海水衰减的探测。本文设计的用于海洋拖曳观测系统的吸光度传感器吸收池路径长度为10 mm,综合考虑传感器体积及机械结构设计等因素选择使用透射式光路。
值得注意的是,在给出吸光度数据时,同时应给出路径长度参数[27]。光束衰减系数c可表示为
式中,T为光束透过率,L为海水介质的光学路径长度。吸光度值A可表示为
传感器制作完成后,路径长度L为固定参数,吸光度值A与光束衰减系数c的转换关系为
海水吸光度测量通过测定海水相对于标准溶液(一般为超纯水)的吸光度,根据吸光度值的大小可以反映海水中的颗粒浓度及成分,相较于光束衰减系数,吸光度对粒子浓度的反映更加直观。
式中,Asea为海水吸光度值,Aref为超纯水吸光度值,V0sea为测量海水时入射光强度,V1sea为测量海水时透射光强度,V0ref为测量超纯水时入射光强度,V1ref为测量超纯水时透射光强度,A为海水相对于超纯水的吸光度。式(4)也体现了在LED 光源处设计参考探测器的必要性,以此来校正测量过程中光源波动变化对吸光度值的影响。
1.2 数字锁相放大器原理
传统锁相放大器采用模拟混频器和RC 滤波器实现解调,模拟锁相放大器存在硬件设计复杂、功耗高、增益误差大等问题;随着数字信号处理技术的发展,数字锁相放大器逐步取代模拟锁相放大器被广泛应用,数字锁相放大器输入噪声小、硬件电路简单、稳定性高、功耗小,非常适合于海洋传感器进行微弱信号处理[28]。
锁相放大器的实现原理如图2 所示,传感器采用781.25 Hz 的正弦信号调制LED 发光,光电探测器接收待测信号后,经前置放大、带通滤波后进入AD 采集,与参考信号基于互相关检测原理进行信号解调,参考信号使用与待测信号频率相同、相位差为0 的正弦信号,通过乘法器与低通滤波器后得到与待测信号幅度相关的输出信号。
吸光度传感器进行原位测量时,会受到太阳光的极大干扰,本文设计的用于海洋拖曳观测系统的吸光度传感器可用于明场环境探测,对背景光的抑制主要从两方面进行:从光学角度,在光路中使用高截止深度滤光片对带外宽波段背景光进行滤除,且通过对多通道不同波长的探测系统进行排布,也可进一步减小相邻波长通道散射光的影响;从电子学角度,采用数字锁相放大技术抑制低通滤波器带宽外的噪声信号。
1.3 传感器关键部件及参数
针对海洋拖曳观测系统的吸光度传感器设计要求,从体积、功耗、响应速度及实际应用等多方面综合考虑,选取LED 和光电二极管分别作为传感器的光源和探测器,使用光谱仪作为光电探测器进行原位探测易受环境背景光的干扰,尤其是海表层附近的环境光变化较为迅速。
本文设计的吸光度传感器是一种多波段的测量系统,中心波长分别是340 nm、370 nm、465 nm、530 nm、565 nm、625 nm、800 nm、980 nm。其中,一些波段的吸光度数据可作为重要参考信息,如:530 nm 波段是人眼最为敏感的波段,该波段吸光度值对于海洋透明度信息具有重要参考意义;该吸光度传感器的波段也可以根据不同测量需要进行灵活调整,如可以将其中一个通道替换为254 nm 通道进行TOC 和COD 浓度等的测量。
吸收池路径长度是传感器的一个关键参数,目前国际领先设备常使用的路径长度有10 mm、100 mm、250 mm 等,吸收池路径越长,传感器灵敏度越高,但路径长度太长容易受到气泡的影响,气泡对于光学传感器的影响极大,也会影响对数据的分析判断。不同的路径长度可适用于不同海域海水的测量,在清澈海域进行吸光度测量应选取较长路径的吸收池,或者可以考虑使用反射式光路来实现较长的路径长度,本文设计的传感器考虑在近海环境及藻华区域拖曳的使用条件,选取吸收池路径长度为10 mm。
2 吸光度传感器硬件设计
吸光度传感器的研制过程,包含光、机、电组件小型化设计,通过优化光路设计、机械结构设计、电路设计实现可用于海洋拖曳观测系统的高精度吸光度传感器研制,8 个通道的光学、机械结构及探测电路采用一体小型化设计,分别嵌入到发射端和接收端结构中,最大程度压缩传感器的体积,实现8 个波段的吸光度同步探测,并形成成熟的装配工艺。吸光度传感器工作功耗为2.10 W。
为实现传感器的高集成度,传感器8 个波段的吸光度探测通道采取并排排列的设计方案,接下来以单通道吸光度系统介绍传感器的光机结构及集成电路设计。
2.1 光路设计
吸光度传感器光路设计使用LED 照明小孔光阑提供优质点光源并提升光源准直效率,光束准直后从发射端窗口出射,通过吸收池海水介质后,再依次经过接收端窗口、带通滤光片后由聚焦透镜聚焦在光电二极管的接收靶面。
吸光度值的测量误差受部分前向散射光的影响,传感器的设计差异会导致不同的测量精度,不同类型的传感器有不同的使用标准,吸光度测量系统一般不进行散射校正,因此在吸光度测量系统设计过程中,应尽可能减小前向散射光及其背景杂散光的影响,使光电探测器的接收角尽可能小[26]。吸光度传感器单通道光学系统结构图如图3 所示,探测器靶面上的辐照度分布图如图4 所示。

图3 单通道光学系统结构Fig.3 Single channel optical system structure diagram
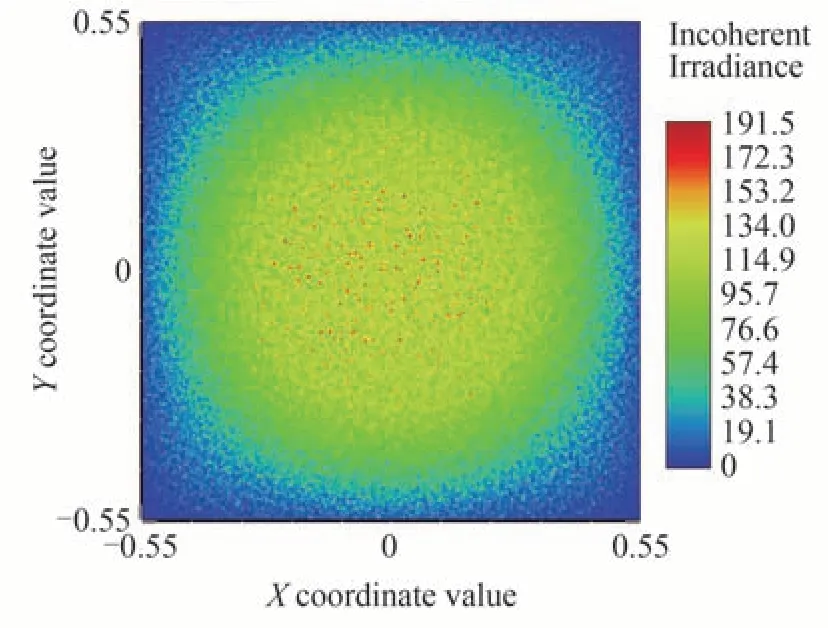
图4 探测器靶面总辐照度分布示意图Fig.4 Schematic diagram of total irradiance distribution on detector target surface
2.2 电路设计
吸光度传感器电路设计主要包括LED 驱动电路、参考及透射端光电检测电路及单片机控制电路。为优化传感器集成度,LED 驱动电路及光电检测电路均需要嵌入到发射端及接收端模块内部,多通道吸光度并排排列的光机结构设计有利于电路板的集成设计,但电路板体积受机械支撑结构的限制,对电路板的器件布局和走线有较高要求。
LED 驱动电路设计需考虑多个LED 的发光效率和正向偏压,不同波段的LED 正向导通电压有较大区别,本传感器设计一种大动态电压范围的恒流驱动电路驱动LED 发光。参考及透射端光电检测电路主要包括光电转换、跨阻放大及增益电路;LED 在上电工作初期,发光强度会有一定程度的漂移,为了消除LED 开启初期以及工作过程中因LED 发光效率改变对吸光度测量结果的影响,需要设计参考探测器电路对LED的发光效率进行监测,从而对测得的吸光度值进行校准。
单片机控制电路包括4 部分功能,1)提供8 通道稳定的781.25 Hz 的正弦信号,输入到LED 驱动电路激发LED 发光;2)参考端探测器检测电路的信号处理;3)透射端探测器检测电路的信号处理,对提供的信号进行带通滤波后在单片机内部实现数字锁相处理;4)使用232 通信方式与上位机模块实现通信及数据传输。单片机控制电路布局如图5 所示。
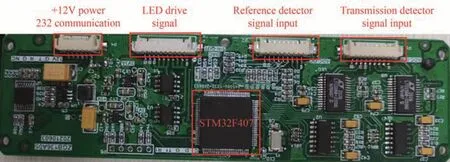
图5 单片机控制电路布局图Fig.5 Layout of single chip microcomputer control circuit
2.3 机械结构设计
吸光度传感器机械结构设计主要包含对LED 光源、光学透镜组件、光电二极管以及集成电路板等元件的机械支撑,光学透镜组件通过光路设计仿真确定,整体机械结构使用8 通道并排排列的方式,为传感器提供稳固的机械结构支撑;值得注意的是,为增强表贴型参考探测器的信号,LED 支撑件内腔进行亮面处理;为避免传感器自身LED 光源及外界环境光通过海水及颗粒散射、机械外壳的反射等对吸光度值的影响,传感器外壳均进行硬质阳极氧化发黑处理。吸光度传感器单通道光机结构剖面图如图6 所示。

图6 单通道光机结构剖面图Fig.6 Single channel optical mechanical structure profile
吸光度传感器内部结构如图7 所示,主要包含发射端组件和接收端组件,传感器装配实物图如图8 所示。
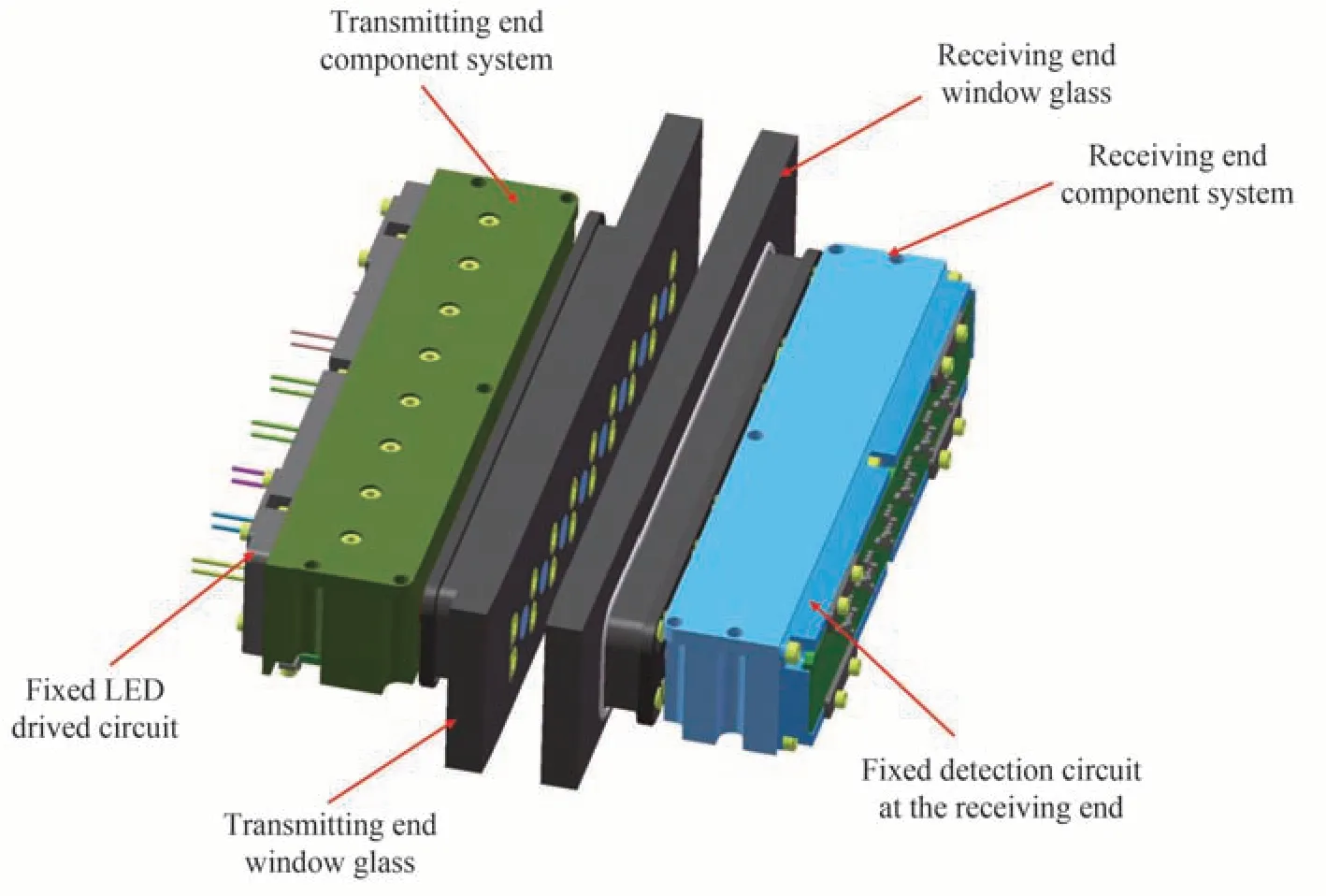
图7 传感器内部结构图Fig.7 Internal structure diagram of sensor
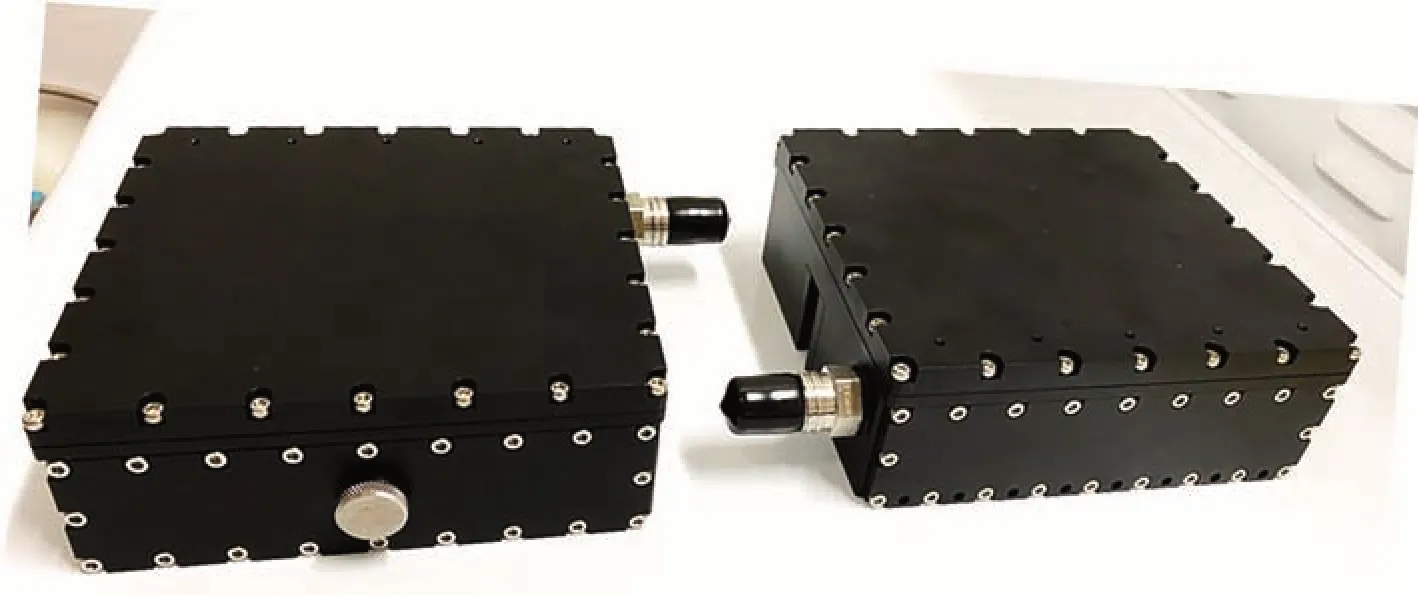
图8 传感器装配实物图Fig.8 Picture of sensor assembly
本文设计的吸光度传感器用于海洋拖曳观测系统,该拖曳观测系统还搭载了高精度温度、盐度、深度及荧光传感器,为海洋环境安全及水质监测提供重要技术支持与数据支撑。各传感器在拖曳观测系统的单个集成模块中的排布示意图如图9 所示。
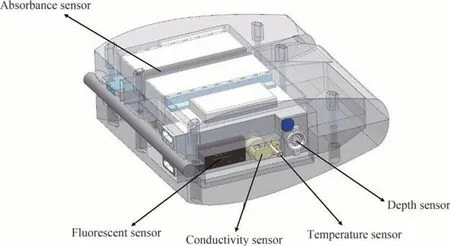
图9 单个集成模块示意图Fig.9 Schematic diagram of single integration module
3 实验结果
为验证研制吸光度传感器的性能,使用吸光度传感器在实验室环境下进行精度测试,对数据进行分析,并使用德国Trios 公司生产的VIPER 测量仪进行比对测试,以此验证传感器的适用性及可靠性。此外,传感器还搭载拖曳观测系统在中国南海进行海试试验,传感器在试验过程中功能正常,并获得了部分南海海水的吸光度剖面数据。
3.1 实验室内传感器精度测试
在实验室稳定的环境下进行吸光度传感器精度测试,测试环境为实验室水槽,海水样品为青岛石老人海水浴场近岸海水,因打捞的海水样品所含泥沙悬浮颗粒较多,采用1 μm 的滤纸过滤后进行实验,测试过滤海水相对于超纯水的吸光度值。
表1 展示了8 个通道吸光度值的测量精度。由结果可以看出,所研制的吸光度传感器的精度可以达到7.9·10−5AU(Absorbance Unit)。

表1 传感器8 个通道吸光度值精度Table 1 Precision of the absorbance value of the sensor for 8 channels
3.2 比对试验测试
所使用的比对设备为德国Trios 公司生产的VIPER 测量仪,VIPER 测量仪使用5 个波段的集成LED 阵列作为传感器的光源,使用微型光谱仪作为传感器的探测器,测量波段范围为347 nm~720 nm,吸收池光程也为10 mm。在实验室水槽内进行过滤海水测量,吸光度传感器共进行了约0.5 h 的长期测试,取测量时间段内的均值作为对应通道中心波段的吸光度值,比对结果示意图如图10 所示。

图10 吸光度传感器与VIPER 比对结果图Fig.10 Comparison between Absorbance sensor and VIPER
从图10 可以看出,吸光度传感器与VIPER 测量仪的结果在370~625 nm 的吸光度值具有较强的一致性,在347 nm 处VIPER 测量仪的吸光度数值过大,可能由于其集成LED 光源在该波长处的信号强度过低,导致探测结果出现偏差;在370~625 nm 处吸光度值上的微小差异可能由以下原因造成:两个传感器的光谱分辨率不同,VIPER 测量仪使用光谱仪作为探测器,吸光度传感器光电二极管接收到的信号带宽是由滤光片与LED 光源共同决定的,该差异会导致吸光度值的微小偏差。
3.3 南海海水测试
所研制的吸光度传感器搭载于拖曳观测系统在中国南海部分海域进行海试试验,拖曳观测系统同时还包含高精度温度、盐度、深度传感器及荧光传感器,传感器集成模块入水拖曳状态如图11 所示。

图11 传感器集成模块入水拖曳状态示意图Fig.11 Schematic diagram of sensor integration module towing in water
吸光度传感器在拖曳链上呈一定规律排布,测量0~210 m 左右水深的吸光度值,吸光度传感器使用拖曳时间内的吸光度均值代表某一深度的吸光度值,得到南海部分海域的吸光度剖面数据如图12 所示。从整体数据上分析,所测试海域的海水在测量深度范围内,同一波长的吸光度值差异不大,625 nm 通道、530 nm通道的吸光度值较小,近紫外波段340 nm 通道、370 nm 通道的吸光度值较大。
4 结论
本文设计完成了一种用于海洋拖曳观测系统的吸光度传感器,该传感器可用于明场环境探测,也可独立用于近岸水域吸光度值的原位探测。该传感器使用LED 和光电二极管作为传感器的光源和探测器,使得传感器实现多波段吸光度探测,从光路、电路及机械结构多方面进行优化设计实现传感器的小型化、高精度、低功耗等优点。经实验室精度验证测试,吸光度传感器的测量精度优于0.000 1 AU。除此之外,吸光度传感器搭载拖曳观测系统在南海部分海域的吸光度值测量获得了较好的结果。
所研制的吸光度传感器可以实现吸光度值的连续监测,且通过光学滤光片及数字锁相技术实现明场环境下的吸光度探测,避免了环境光的干扰,也可以应用于海洋浮标、拖曳观测平台、船基观测平台等,具备广泛的应用前景。
