舰船图像颜色特征目标自动采集系统视觉优化
2023-06-15张洪波
张洪波
(郑州科技学院,河南 郑州 450064)
0 引言
随着信息化技术、计算机技术的迅速发展,海上作战逐步成为以信息化为主导的战争,信息、情报数据已经成为决定海上作战胜负的关键因素。海上侦察中,舰船的识别与快速处理技术能及时获取敌方船舶的位置、类型等情报,从而在军事作战中占据主动。
相对于传统的雷达探测技术,遥感技术可以直接生成海域内船舶的准确图像,通过对图像进行分割、特征提取、过滤等处理,可以提取准确的船舶目标信息。目前,基于遥感图像的海上船舶目标探测、侦察与监视等获得了广泛的应用,且应用潜力还在进一步挖掘中[1]。
为了提高基于遥感图像的舰船目标识别效率,本文将研究重点放在舰船图像特征目标自动采集系统,介绍舰船遥感图像的基本特征,从舰船图像的像素滤波、模糊聚类算法、像素平滑算法等方面介绍图像特征自动采集系统的关键功能,并结合C++编程语言,在Microsoft Visual Studio 2010 平台上实现了自动采集系统的软件开发。
1 舰船遥感图像的基本特征
舰船遥感图像是根据电磁波理论,对海域内目标所辐射和反射的电磁波信息采集与处理,最终得到目标物体影像的一种探测方法。
遥感图像雷达的距离分辨率与电磁波脉冲带宽和有关,带宽分辨率可用下式计算:
式中:C0为传播速度,C0=cλ0;λ0为调制前的脉冲带宽;B为实际的带宽。
方向分辨率用下式计算:
式中:β为雷达的张角。
遥感图像雷达的信噪比可用下式表示:
其中:σ0为目标的分散系数;θ0为雷达波的入射角度;F0为雷达的硬件噪声;LMIN为电磁波损失;P0为发射功率;G为天线增益。
高分辨率遥感图像中的像素包括背景、噪声和目标信息,可用下式表示:
其中,(x,y)为像素点;f1(x,y)为舰船目标的像素点;f2(x,y)为背景像素点;f3(x,y)为噪声像素点值。
典型的海上舰船高分辨率遥感图像如图1 所示。

图1 典型的海上舰船高分辨率遥感图像Fig.1 High-resolution remote sensing images of typical ships at sea
海上高分辨率遥感图像的噪声来源有多种,最常见的噪声干扰是海域内的云层、水汽等障碍物信号。为了更好进行遥感图像的噪声过滤,将遥感图像的噪声信号分为加性和乘性噪声2 种。
1)加性噪声
所谓加性噪声是指噪声与遥感图像的本身信号强度无关,通常以硬件噪声为主,比如信号传输过程的设备噪声、信道噪声等。
加性噪声的模型可表示为:
式中:s(x,y)为信道噪声;α(x,y)为设备硬件噪声。
2)乘性噪声
乘性噪声是指与图像本身相关的信号,比如图像的强度、障碍物等,乘性噪声模型可表示为:
式中:β(x,y)为图像灰度噪声;η(x,y)为障碍物噪声。
本文的研究方向是海上遥感图像的船舶目标特征采集,基本流程如图2 所示。
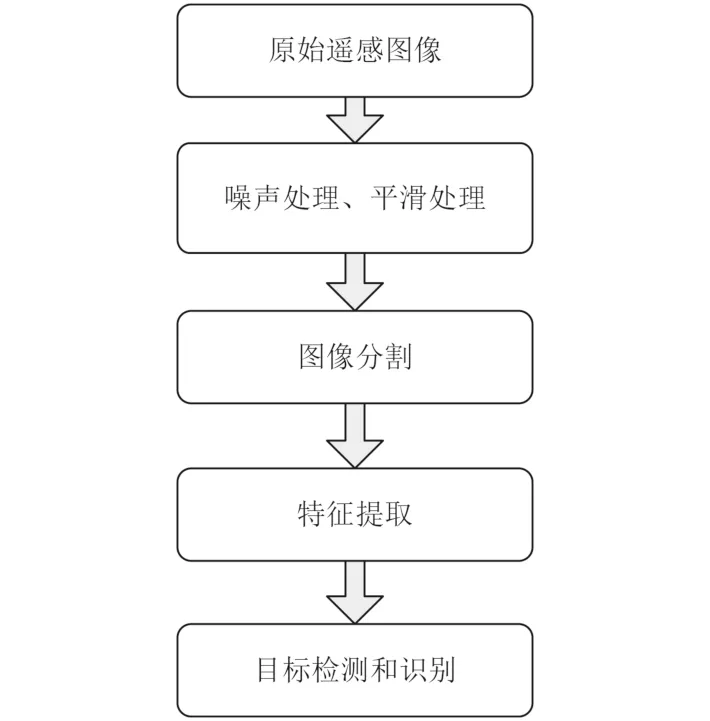
图2 海上遥感图像的船舶目标特征采集基本流程Fig.2 Basic process of ship target feature acquisition for maritime remote sensing images
2 舰船图像颜色特征目标自动采集系统的关键技术
2.1 像素滤波算法
舰船遥感图像中包含大量的噪声信号,这些噪声信号会影响船舶目标特征的提取和识别,影响遥感图像的灰度值。
为了提高遥感图像目标特征自动采集系统的检测精度,本文采用一种LEE 滤波算法,滤波器的模型如下:
LEE 滤波器R(t)的平方可积,在频域内有:
针对不同像素尺寸的图像,LEE 滤波器模型可以通过平移与伸缩变换提高适应性:
式中:s为伸缩变换因子;α为平移变换因子。
为了提高LEE 滤波器的滤波带宽[2],本文利用小波变换进行模型处理,如下:
小波逆变换为:
图3 为LEE 滤波器处理前后遥感图像局部区域的对比示意图。
2.2 基于模糊聚类算法的舰船图像分类、分割技术
为了提高舰船遥感图像目标自动采集系统的效率,本文采用模糊聚类算法进行遥感图像的预处理,包括图像分类和多尺度图像分割技术。
模糊聚类算法利用图像之间的像素灰度相似性进行分类,由于遥感图像的背景、纹理等特征各不相同,利用模糊聚类能够有效改善目标提取的效率[3]。
基于模糊聚类的舰船图像分类、分割流程如下:
1)假设遥感图像的样本数据集合为:
xi为n维像素数据,定义聚类分析的目标函数为:
式中,l为聚类分析的迭代次数[4];[δm]为聚类矩阵。
2)计算图像的模糊聚类中心:
3)计算模糊聚类的协方差矩阵:
4)定义隶属度函数U(l)。
选用梯形隶属度函数,曲线如图4 所示。
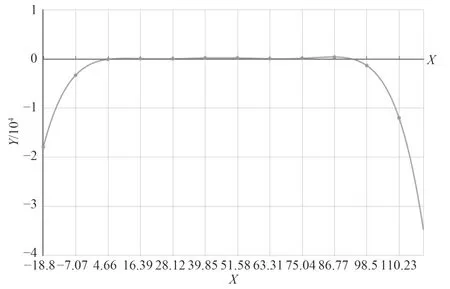
图4 梯形隶属度函数曲线图Fig.4 Trapezoidal membership function curve
5)根据协方差矩阵和隶属度函数进行图像的分类、分割,定义迭代次数为l=1,2,···,m,分类完成的终止条件∥U(l)−U(l−1)∥<λ。
2.3 船舶遥感图像的像素平滑处理技术研究
像素的平滑处理也是提高目标自动采集系统效率的重要环节,本文采用的像素平滑处理是帧间差分法[5]。
当遥感卫星连续采集2 帧海上船舶的遥感图像时,2 帧之间的差分间隔在一定程度上会影响图像的质量,帧间差分如下:
式中:Sn(i,j)为当前采集的船舶遥感差分图像;Fn(i,j)为卫星采集的第n帧遥感图像;Fn−1(i,j)为卫星采集的第n−1 帧遥感图像[6]。
确定遥感图像帧的某像素点(x,y),其像素灰度为f(x,y),建立像素平滑处理模型函数为:
3 舰船遥感图像特征目标自动采集系统的搭建
本文在舰船遥感图像特征目标自动采集系统的搭建,利用的程序语言为C++编程语言,采用的平台为Microsoft Visual Studio 2010。将遥感图像特征目标自动采集系统的功能模块划分为图像载入模块、预处理模块、模糊聚类分割模块、平滑处理模块和特征提取模块。
图5 为舰船遥感图像特征目标自动采集系统的工作流程图。
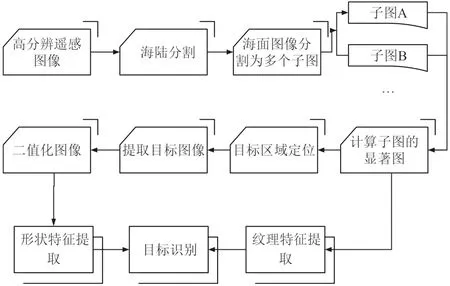
图5 遥感图像特征目标自动采集系统的工作流程图Fig.5 Flow diagram of ship remote sensing image feature target automatic acquisition system
遥感图像特征目标自动采集系统的舰船图像目标采集示意图如图6 所示。

图6 自动采集系统的舰船图像目标识别效果图Fig.6 Rendering of ship image target recognition by automatic acquisition system
4 结语
为了提高海上舰船遥感图像的目标识别效率,本文基于Microsoft Visual Studio 2010 搭建了舰船遥感图像特征目标自动采集系统,分别介绍了该系统的图像滤波、模糊聚类分析、平滑处理等关键技术。
