我国辣椒收获机械化的技术现状与研究对策
2023-06-13范素香娄洪轩蔡培方张燊楠郝用兴
范素香,孙 瑞,娄洪轩,蔡培方,张燊楠,郝用兴
(华北水利水电大学 机械学院,河南 郑州 450046)
辣椒属于茄科辣椒属植物,是一种一年或有限年生长的草本植物,是世界上仅次于番茄、豆类的第三大蔬菜类农作物[1]。由于辣椒果实采摘过程的本身具有很大的复杂性,以及辣椒果实易破损、易发霉、易生虫等特点,加之辣椒果实采摘时间因品种不同而不同,并且采集期限短、劳动强度大、采集条件差、收获效益较低等问题,严重制约着辣椒行业的科学发展[2]。目前我国对智能机械化辣椒收获机的设计研究相比欧美等发达国家较晚,种植和收获的机械化程度较低,农艺和农机结合性较差,专门针对辣椒种植和收获的机械设备研究较少,基本处于人工采摘或半机械化采摘阶段[3]。辣椒收获机智能化水平较低,根据辣椒成熟度自动调整辣椒采摘速度和高度的性能不足,减低辣椒损失率和破损率的能力较差。随着自动化技术和智能技术的发展,辣椒采收智能机械化已成为必然的发展趋势。
1 国内外辣椒收获机研究现状
1.1 国外机械化辣椒收获技术研究现状
国外发达国家对辣椒收获机的研究较早,以美国为主的辣椒大国从20世纪70年代起就开始研究辣椒的机械化采摘。1967年,美国首次对马铃状辣椒进行了机械化收割[4]。1976年,由McClendon辣椒有限公司独立研制并生产出了Peter Piper展开式的双螺旋式甜椒收获机[5]。1998年,由Pik-Rite公司和Bucknell大学的联合研究,对甜椒收获机进行了改造,采摘效果良好,辣椒收获机的研发也自此取得了阶段性的成果[6]。印度Yung-Etgar农业机械研究院,使用倾斜的双螺旋式机器作为收获设备,并开发出了两行和四行的自走型辣椒收获机[7]。2010年由Yung-Etgar/Oxbo以色列的农业机械研究所制造的辣椒收获机,使用了倾斜展开双螺旋式采摘机构,主要生产的是收获青椒和红干椒的两行、四行自走式辣椒收获机[8]。2016年,Kyung-Sik Kang等开发了用于自行式辣椒收获机的螺旋式采摘头,通过测试螺旋类型、螺旋缠绕方向和螺旋旋转速度,获得了最佳工作条件[9]。2019年McClendon公司研发了两种收获机设备,分别可以收获不同品种的辣椒,橡胶指式的辣椒收获机用于采摘干红椒,展开双螺旋式的用于采摘青辣椒。2021年,Seo-Yong Shin等针对茎-果分离率低和辣椒损伤率高的问题,研制了三轴和四轴的滚筒式茎-果分离装置,在分离装置中使用梳齿,并对分离装置进行了性能测试[10]。Pik Rite公司所制作的干辣椒收获机,使用了梳齿带式、振动滚筒式采摘机构,振动滚筒式采摘机构用于摘取铃状椒、黄辣椒、墨西哥辣椒、樱桃椒等,梳齿带式则用来摘取干红椒。成熟度评估是选择性机器人收获的一个重要特征。Harel B和 Kurtser P等研究了甜椒机器收获机彩色摄像机的成熟度评估。根据甜椒机器人收获机的彩色摄像机得出的成熟度评估,确定甜椒成熟度水平所需的视点数和最佳单视点,对甜椒成熟度的不同颜色和形态特征进行了评价[11]。
欧美发达国家的辣椒收获技术的研究起步早,设备成熟,配套完善。目前美国产品技术处于高端地位,西方国家辣椒收获机现在是向大功率、宽割幅、高效率、低油耗、高性能、高可靠、高舒适性、自动化和智能化等方向靠拢,且已实现大型化。
1.2 国内机械化辣椒收获技术研究现状
海外的辣椒收获机市场上的成熟品牌已经较多,产品研发早已进入一个稳步发展的时期,国内辣椒收获机正在研发摸索过程,已经研发了多种辣椒收获机,弥补了国内该行业的许多短板,不过对关键模块的研发,和国外先进技术水平还具有很大距离。国内专家和科研机构、生产单位也对自走式辣椒收获机、辣椒采收装置、清选设备等开展了研究。
2009年,新疆机械研究所开发了一种自行固定式辣椒收获机,该收获机使用滚轮指状收集装置[12]。在2021年,新型4JZ-3600B 牧神自行式辣椒收获机,使用3.6m非行收割台,在操作过程中不受作物行间距的限制。收割台配有一个柔性采摘滚筒,以适应不同地区各种线性辣椒和板式辣椒的灵活收集。该机可一次完成辣椒的采摘、运输、清洗和分离、再去除、收割、卸载和装载,其采摘效率达到国内领先水平。
2012年,石河子光大顺德区研发公司成功开发出了一种带式梳齿的自走型辣椒收获机[13],如图1所示,采摘机头通过倒梯形沟槽板,而采摘梳齿位于倒梯形沟槽板上,使采摘机头经久耐用,在采摘过程中也没有发生采摘事故,极大地提升了生产辣椒收获机的效率。2019年,石河子光大顺德区研发公司开发的4JZ系列自走式辣椒收获机,幅宽分别为1.6m、2.6m和3.6m。
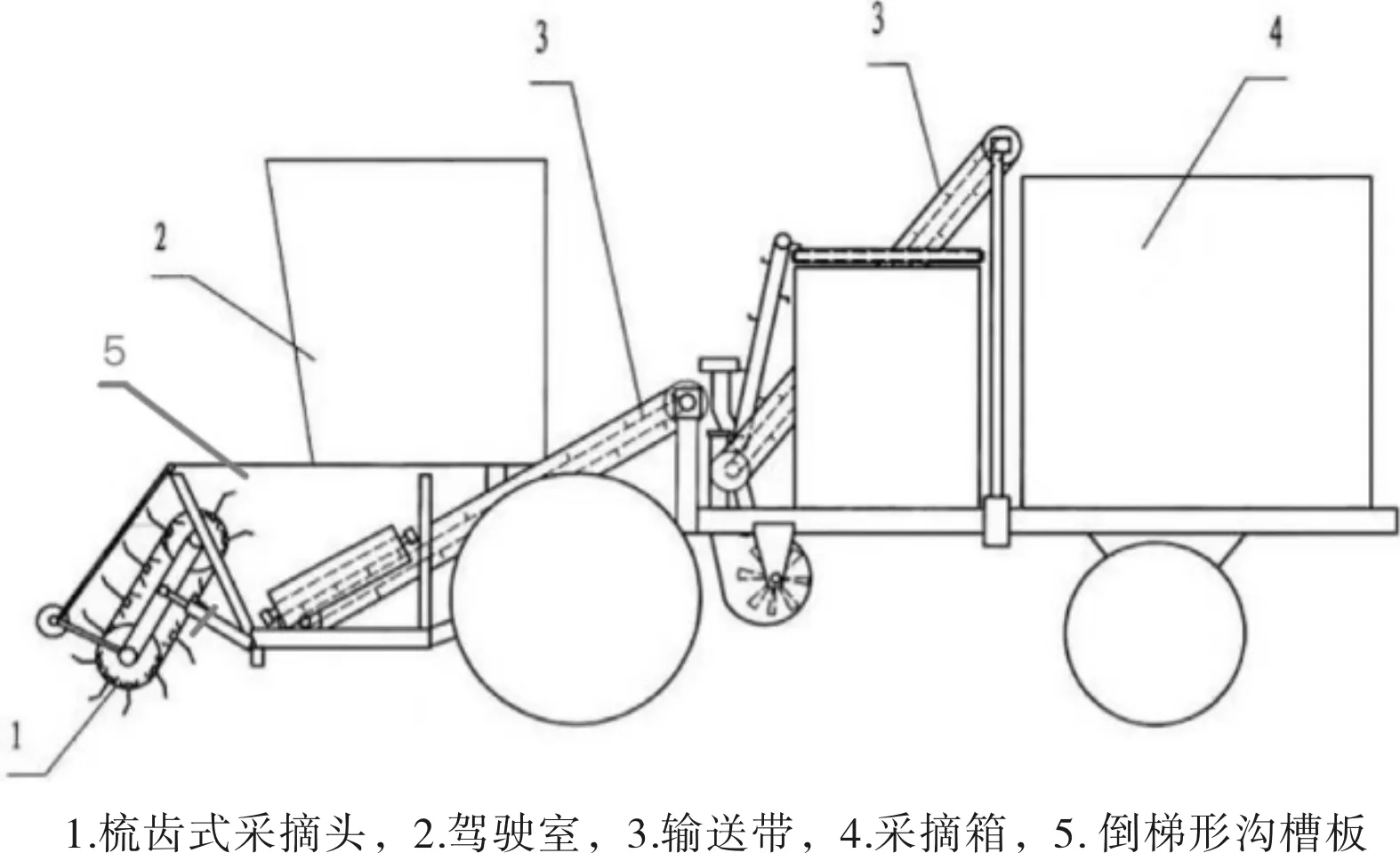
图1 梳齿式辣椒采摘机
河北雷肯农机有限公司开发了4AZ-2200型自行式辣椒收获机,采用螺旋头选配弹簧齿,适应性强,采收率高,破损率低,适合不同品种辣椒的采收。采摘前台采用液压控制升降,可根据辣椒品种和产量调节采摘割台的速度和高度,有效保证辣椒采摘质量。收获机上的清选设备能够保证更干净的收成和节省大量的劳动力。
总的来说,随着农作物生产方式向农业集约化大规模化发展,中国自走式辣椒收获机技术虽然取得一定的进步,但仍存在着创新能力差、高端收割设备及关键零配件依靠进口、自动化水平低的不足。目前市场上主要投入生产的国产品牌的辣椒收获机,从整体上看存在着自动化水平低、可靠性低、故障率高的缺点。
2 辣椒采摘装置工作原理及研究现状
辣椒采摘装置是辣椒收获机最关键的装置,所以,辣椒收获机对不同品种的辣椒采收的适应性问题主要是由采摘设备的采集性能好坏确定的,因为辣椒种类的多样性,而且辣椒中各个种类的物理学特征都存在着很明显的不同,例如辣椒的比重,长径比、形态等都存在着很明显的不同,品种不同的辣椒也就对采收条件产生了不同的需求。因此,辣椒收获机的可靠性和适用性对于提高辣椒收获质量至关重要,其中最显著的影响来自其结构特征的优化。
2.1 辣椒采摘装置工作原理
当前,根据采摘机的特性,市场上的采摘设备可大致划分为四种:展开双螺旋线、杆条梳齿、带状梳指、滚筒弹指等。
(1)滚筒弹指型
工作原理:在牵引车牵引下,采收辊转动,使其脱离干梗,而收获的辣椒果实则被运送到辊子后面的传送带,送进采摘箱结束收获。
采摘台主要由1.左右分禾器、2.伏草辊、3.弹齿、4.采摘滚筒、5.托地辊、11.圆弧导向板、8.液压传动系统、9.输送系统和10.机架组成,如图2所示。
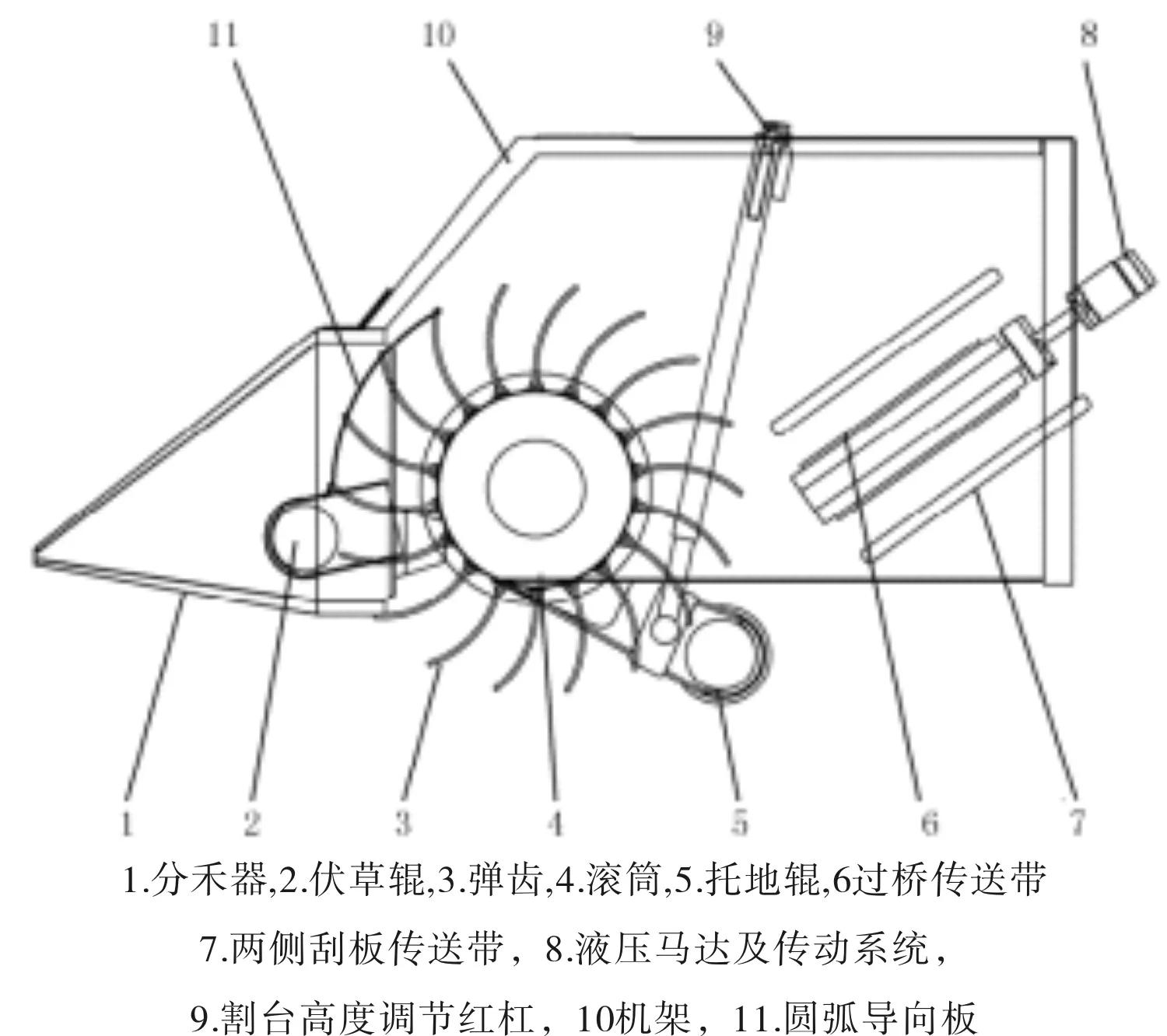
图2 采摘台结构示意图
这种转轮式的收割机在国内使用的并不多。
(2)展开双螺旋线型
工作原理:当辣椒收获机械沿着辣椒垄行前进工作时,辣椒茎秧会顺着螺旋杆进入收获装置,辣椒茎秧由于螺旋杆的不停转动会被持续敲打,直到螺旋杆将果实从茎秆上打落,实现果实与茎秆的分离。
通过大量的试验和样机测试,对于干红辣椒以及青椒这种体积较大的辣椒果实,倾斜展开螺旋线型采摘机收获效率远高于其他的收获机,同时这种采摘机可以有效降低辣椒果实破损率,并且这种采摘机受到了美国大多数辣椒收获机销售厂家的欢迎[14-15]。
(3)杆条梳指型
工作原理:当辣椒收获机沿着辣椒的垄行轨道开展作业后,辣椒茎秧进入了杆条上所安装的多个梳指之内后,以水平运动的杆条或向下移动的梳指对辣椒茎秧实施多次捋挂动作,并随之完成了果实和茎秆间的剥离。
杆条梳指型收获装置,一般都是用于采摘红辣椒和青辣椒,但要求果实的尺寸相当大,而且由于采收时破损量大,且采摘效率也很低下,所以并不能获得普遍的使用[16-17]。
(4)带状梳齿型
工作原理:其采摘的工作方式为梳齿型采摘,以自动回转方式甩送货物,对割台的驱动采用全液压方式。在收获时,按照所采收作物的长势状态和栽培方法,由托地辊控制割台的高度,伏草辊通过液压缸调节伏草角度,启动滚筒及传送带液压马达,准备前进作业; 收获时,伏草辊先将即将被掠刮的辣椒朝一边压倒,使主茎秆与地面呈一定夹角; 当伏草辊通过整株作物时,辣椒主茎秆会有一个迅速回弹的趋势,此时弹齿滚筒旋转前进,模拟人手摘辣椒的动作,柔性弹齿首先接触植株,并以一定角度插入植株网内部,从下而上掠刮掉果实,其中也可能会含有部分叶片和断落的茎秆。我国主要的辣椒收获机的采摘台就是这种采摘机器[18]。
2.2 辣椒采摘装置的研究现状
雷明举(2014)[19]报告针对4LS-1.6型号辣椒收获机摘取设备的负荷过大、设备构造与操作参数不正确、导致振动与噪声过大等方面的问题,就摘取设备开展了分析探讨。采用静、动态灵敏度分析的方法,对机架参数进行了优化,优化后机架重量减轻,振动降低,得到采摘装置较优的运动参数组合,为辣椒采摘装置研制提供了理论依据。
段以磊等(2014)[20]通过使用弹齿滚筒式辣椒采摘装置,对板椒进行了实验,研究了该装置在采摘过程中造成的损伤特征及其机理,以减少采摘过程中对辣椒的机械损伤。结果表明:辣椒在收获过程的中的破损率约百分之十,破损是由于收割时弹齿对辣椒切割、撞击及摩擦力引起的,为完善和发展降低破损辣椒的收获设备和完善的作业技术提出依据与方向。
赵飞龙(2019)[21]通过对辣椒收获机风机清选的液压控制系统设计问题进行了研究探讨,并针对以往的风机清选过程中所存在的转速不均,从而导致了辣椒清选效率不好的现象,建立了风机清选过程的几个不同的液压控制系统设计方案,并通过AMEsim的仿真实验结果提出,常规PID闭环控制的调压电路要比开口的线圈控制系统,能够更快速满足空气温度的动态变化,进而降低了控制的液体压力。田间试验结果表明,清选后的平均含杂率仅为1.58%,完全满足了辣椒清选的行业要求。
薛世民(2020)[22]、张俊(2020)[23]使用新疆牧神机械有限责任公司制造的4JZ-3600型自走式甜椒收获机进行了实验,并对实验结果进行了数据分析处理,得出采摘时滚筒速度随作业人员行进车速变化的影响,及其对甜椒果实破碎率和甜椒果实品质影响作用的折线图。结果表明,由于辣椒收获割台的采摘滚筒速度,对辣椒采收过程中的破碎率以及损失率均有很大作用,所以在采摘平台的转速和滚筒采摘速度之间必须正确适配,才会达到较少的破碎率和损失率。
因为普通钢丝弹齿刚性较强,且接触面较小,极易打烂辣椒表面,从而导致后期的辣椒变质、腐败,较难达到板椒的采摘条件。为提高弹齿收割平台的适用性和通用性,并降低收割后对甜椒果实的破坏度,邹道钟(2022)[24]等人设计了一个采用尼龙弹齿的甜椒收获台,可模仿人手采摘方式,并可按照实际的种植高度,通过伏草辊调整其采摘高度,从而更有利于收获不同类型的甜椒。
袁小伟(2021)[25]等人研究了新型双螺旋对辊型辣椒采收系统及其运行原理,并通过对辣椒的钉形钢杆闭合处进行受力分析,确定了影响采收效果的主要因子,并采用单因素试验确定优化试验中的各因子选择程度。以采净率和破碎度为主要检验参数,以工作速率、对辊速度、对辊宽度和对辊螺距为主要检验因子,采用四参数五水平正交的综合设计实验,试验结果显示:采净率为百分之98.7%,破碎率为3.46%,完全符合色素甜椒收获机田间作业条件,实验结论可为色素甜椒收获机的进一步研究与改造提供重要数据参考[26]。
由此可以看出,虽然我国在辣椒收获机发展相对滞后,由于土地环境和辣椒种类的不同,其收获还基本上处在人工或半机械化的时期,但是随着科技的进步以及对辣椒收获机、采摘台的深入研究,这些年有了长足的进步,但是相比国外已经成熟的辣椒收获机的收获体系,我们还有着很长远的路要走。要想在辣椒收获机上更进一步,还是要发展研究更先进的采摘滚筒、清选装置等关键部件,以此来降低辣椒的破损率、损失率,提高采收效率。
3 辣椒机械化收获的发展趋势与研究对策
(1)加强关键零部件的研发
随着农业生产方式向土地集约化、大规模生产和智能化方向发展的持续深化,我国自走式辣椒收获机技术水平已经取得长足进步。在当前农业产业结构调整的推动下,我国更需要机械化生产提高效率,增加对企业研发技术的投资力度,加强关键零部件开发,降低辣椒收获损失率,提高采收效率。通过采用离散元方法的Hertz-Mindlin with bonding黏结模型模拟辣椒-茎秆分离过程,分析割台的高度、采摘滚筒转速对采摘效果的影响,以损失率和破损率为优化指标,优化结构参数和作业参数,提高收割产品性价比和可靠性。加强关键零部件的智能设备研究,进一步提高采收效率,降低使用成本。
(2)加快开发大中型先进收获机型
在现有设计水平的前提下,我们要做的不是一味模仿,而是要借鉴国外先进技术,研究出适合我国种植模式的先进机型。首先,由于我国土地分布分散且复杂,不同品种的辣椒种植也有差异性,想要统一实现大中型机械收获还有很多局限性,因此需要研发满足不同品种辣椒收获的收获机。其次是节约收获成本。因为不同品种辣椒收获要求不同,为了提高利用率,有必要将辣椒收获机系统化、规范化,从而达到一机多用的目的,只需要一个主机装配不同的零部件,收割不同品种的辣椒,既降低了成本,又获得了更高的收益。例如,对变量采摘作业系统进行架构,构建包括GPS、控制终端平台、车载计算机、转速传感器、液压驱动器、液压马达等模块的处方变量辣椒采摘作业系统,实现变量采摘作业。
(3)加快自动化与智能化开发与应用
目前国外的农业机械智能化和自动化技术较为成熟。像机电液一体化、定速巡航、自动对行、信息管理等一系列先进技术已经在大中型收获机中广泛应用,从而提高了产品的作业效率,也提高了可靠性和稳定性。在保证满足工作要求的前提下,提高舒适性与操作方便性也被更加重视。我国在液压传动技术和电气自动化控制技术领域已有重大突破,在农机中的应用也较为广泛,再加上社会越来越重视、越来越认可自动化和智能机械装置,加快自动化和智能化程度较高的收获装置的研制发展及其应用已成为当下研发目标之一。比如可以在现有阶段增加处方图智能识别,利用GPS系统获得各网格点位置,通过实地调研、拍照,根据辣椒颜色、叶面颜色、植株高度等信息,获得各网格点辣椒成熟度数据,制作辣椒成熟度处方图,计算输出相应的控制信号给驱动器。
(4)加快高效能与低能耗的开发与应用
想要达到高效能低能耗的水平,就必须找准出发点、把握切入点、明确落脚点,在结构性能、动力匹配、动力传输方面深入研究,不断优化,在保证高效能的前提下达到低能耗的效果[27]。目前对动力能源所能优化的就是利用太阳能板,将大型农机与新能源相结合,推动高效能发动机的研发。
(5)政府加强扶持
在当前农业产业结构调整的推动下,我国辣椒种植面积不断扩大,更需要机械化生产提高效率,而购买辣椒收获机对于农户来说是一次比较大的投资,因此需要政府在大力推广种植辣椒的同时加大农户购机补贴,增加对企业研发技术的投资力度,推动我国农业生产向现代化迈进。
