基于人机交互技术的舰船智能导航系统设计方法
2023-06-13刘畅
刘 畅
(郑州科技学院,河南 郑州 450064)
0 引 言
随着智能导航技术和GIS视觉信息交互技术的发展,对舰船智能导航系统的人机交互控制能力的精准度要求越来越高。结合人工智能控制和计算机视觉特征分析技术,建立舰船智能导航的实时地图更新模型,通过舰船的航线动态规划设计,采用人工智能传感技术实现对舰船导航的地图信息匹配和动态调度,提高舰船智能导航能力。研究舰船智能导航系统优化设计方法,在提高舰船智能调度和航线规划控制方面具有重要意义[1]。
在对舰船智能导航系统设计中,首先是通过高精度的航线信息加载和人机交互设计,采用航线地图大数据融合方法,结合地图信息匹配和导航地图的实时更新技术,实现智能导航。当前,对舰船智能导航的人机交互方法主要有AODV(Ad hoc on demand distance Vector)的地图信息匹配和自组织网络(vehicular Ad hoc NETwork,VANET)平台设计方法[2],在无线通信网络环境下进行舰船智能导航,本文提出基于人机交互技术的舰船智能导航系统设计方法。首先采用地图投影计算方法进行舰船智能导航的GIS信息加载,然后结合地理约束机制和视觉约束机制,通过量化均衡控制和航海视觉监测,实现对舰船智能导航的人机交互设计。最后进行实验测试,表明本文方法在提高舰船智能导航和视觉信息交互能力方面的优越性能。
1 舰船智能导航系统总体设计构架
为了实现对舰船智能导航系统的优化设计,结合舰船智能导航控制方法和人机交互视觉特征分析方法,建立舰船智能导航的物联网控制平台和大数据平台设计,构建舰船智能导航系统的集成嵌入式控制平台,采用物联网联合组网控制技术,进行舰船智能导航的视觉信息交互和GIS信息加载[3],实现对舰船智能导航系统多功能模块化控制。在信息交互端,建立舰船智能导航系统的数字转换控制模块,差异AD嵌入式控制的方法,构建舰船智能导航的联合组网控制模型,通过视觉信息加载和HMI人机交互界面设计[4],得到系统整体结构图如图1所示。

图1 舰船智能导航系统总体结构设计Fig.1 Overall structure design of ship intelligent navigation system system
根据图1的总体结构模型,通过PLC控制模块实现舰船智能导航控制系统的可编程控制设计,通过远程组态及监测控制的方法进行舰船智能导航的联动协调控制,采用嵌入式结构模块化设计方法,进行舰船智能导航的组态软件开发,建立舰船智能导航系统的传感器组件,采用PXI总线作为舰船智能导航智能化控制系统的内部时钟传输总线,系统的总线结构模型如图2所示。

图2 系统的总线结构模型Fig.2 Bus structure model of the system
2 舰船智能导航的信息处理
2.1 地图投影计算与GIS信息加载
采用多波束数据全覆盖的方法,建立舰船智能导航的信息处理模型和GIS信息加载模型[5],构建海图数据的GIS数据加载模型,得到全球测深数据集GIS信息流x(t),构建经度、纬度和水深差异性目标函数为:
式中:xi∈Rn为舰船智能导航航线数据的差值网格叠加;ui∈Rm为低分辨率网格水深数据的交叉项;Aj(L)为地形细节特征;D(xi,Aj(L))为双曲线加权的海图参数信息。
通过最小曲率平滑参数估计的方法,得到数据稀疏性特征量,中央波束探测输出结果为:
式中:b(τ,φ)为数据稀疏区和空白区的插值信息熵;在GIS目标数据分布及中,f˜(t)为深海大范围 DBM的聚类中心矢量。
结合高分辨率的数字水深模型检测方法,提取高分辨率地形细节特征的GIS目标数据的关联积分,可表示为:
式中:µi为船载模式的多波束测深信息;A为多源数据的采样幅值;pi,j(A)为概率密度。
对多波束、单波束、历史海图数据进行融合处理,得到多波束条带数据的中央波束探测中心向量,记为S={S1,S2,···,SNA}。设任意2个地图投影计算信息的聚类簇Mi与Mj,选择地形细节特征聚类中心特征值Clustdist(Mi,Mj),其中,(i≠j,1≤i≤q,1≤j≤q)。提取以二阶、三阶和中心距,采用多源数据和多波束数据联合分析,得到有向图模型G=(V,A)。通过上述分析,采用地图投影计算与GIS信息加载,实现对舰船智能导航信息融合处理[6]。
2.2 航海视觉监测
对多源数据进行网格化处理,通过曲面拟合算法,进行航海视觉特征分析,得到最小曲率平滑解表示为:
其中:N为高分辨率数据长度;P为多分布航次的多波束数据;f(xi)为海区数据来源多样分布函数。
基于高分辨率网格与基础水深网格分析,得到舰船智能导航的信息特征分布模型参数表述为:
式中:assoc(A,V)为指舰船智能导航航线数据的一组规范正交基。
通过对舰船智能导航航线数据信息融合处理,结合分簇聚类中心模糊检测方法,得到高分辨率数据约束单元的自相关特征量为S=采用高分辨率数据网格分匹配方法,得到多波束测深航次数据的分布属性描述为:
式中:Ci为多波束测深航次数据重建的目标指向性特征值;Zi,j,j′为离散样本采样值。
基于海图数据的分块结构模型,结合航海视觉监测方法,得到舰船智能导航系统的多波束数据分布如图3所示。

图3 舰船智能导航系统的多波束数据分布Fig.3 Multibeam data distribution of ship intelligent navigation system
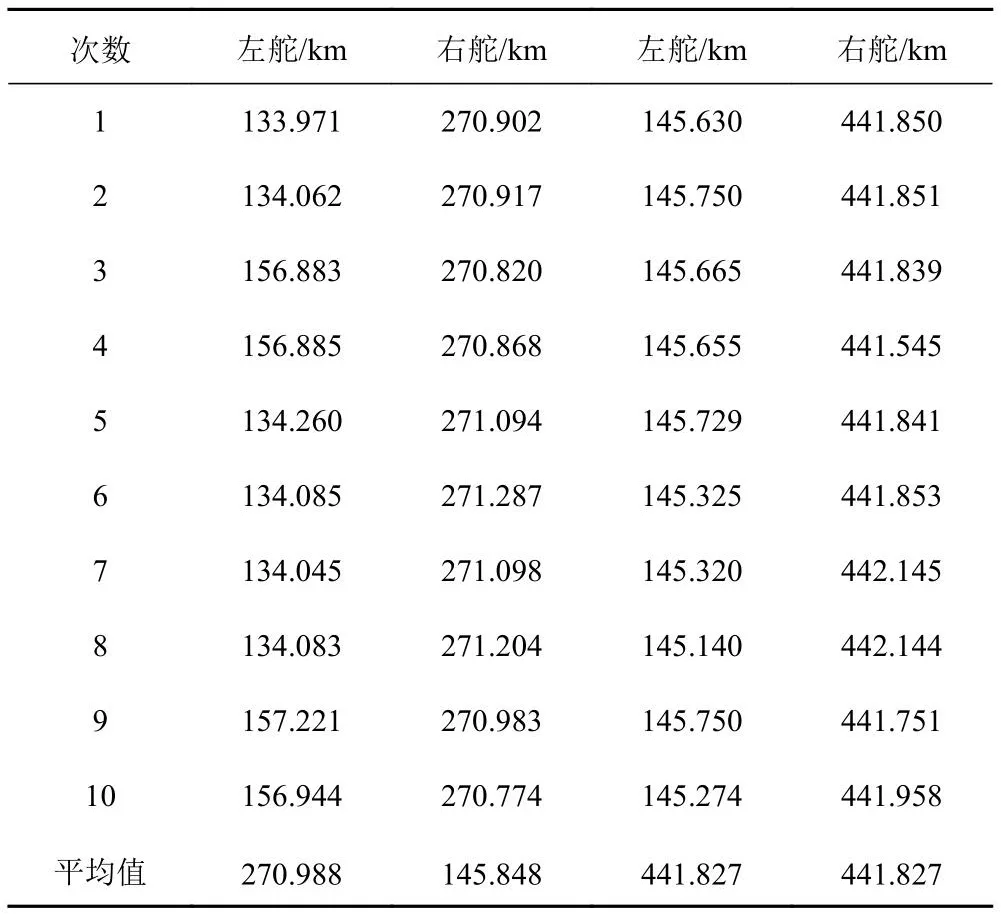
采用GIS遥感成像和地理分块匹配方法,得到目标数据重建的门限值Nth,当Neff 式中:∆xi为最优迭代步长;xn,G为导航数据的图谱特征分布集。将二维分量fx和fy进行二值编码,得到邻域采样点的中心分量: 根据聚类中心搜索结果,结合海图静态水深测量以及航线分支调度方法进行舰船导航过程中的动态信息交互设计,通过同步控制程序分析方法实现对航海视觉动态监测。 在舰船智能导航算法设计的基础上,进行底层数据库模块设计。构建舰船智能导航的控制类函数模型,得到控制类函数表示为AlarmMonitoring,通过指令形式向舰船智能导航的存储器发送控制指令。通过E+H FMR20子模块参数构造,建立舰船智能导航组态软件控制模型。 采用底层信息加载的方法实现舰船智能导航系统的信源描述,设计EventManagemenAction组件实现对舰船智能导航的信令拓扑设计,结合中央控制单元控制设计方法,建立舰船智能导航控制系统的人机装备单元,采用人机交互的硬件配置结构模型,实现对舰船智能导航组态软件智能化控制的A/D、D/A采集,得到舰船智能导航系统的硬件结构模型如图4所示。 图4 舰船智能导航系统的硬件结构模型Fig.4 Hardware structure model of ship intelligent navigation system 使用E+H FMR20控制类结构模型,采用Sys-Log构建舰船智能导航组态软件模型,结合智能化控制的软件程序加载方法,应用人机交互技术实现对舰船智能导航系统的软件开发设计。 为了验证本文方法在实现对舰船智能导航的应用性能,进行实验测试。采用OpenFlight数据库结构模型进行参数设计,采用PlaySound函数完成程序加载,系统开发的三维界面如图5所示。 图5 系统开发三维界面设计Fig.5 System development 3D interface design 由表1可知,采用本文方法进行舰船智能导航的参数解析结果准确可靠,测试导航的精度,得到对比结果如图6所示。 表1 舰船智能导航跟踪几何参数解析结果Tab.1 Analysis results of geometric parameters for ship intelligent navigation and tracking 图6 舰船智能导航精度对比Fig.6 Comparison of ship intelligent navigation accuracy 通过舰船的航线动态规划设计,采用人工智能传感技术实现对舰船导航的地图信息匹配和动态调度,提高舰船智能导航能力。本文提出基于人机交互技术的舰船智能导航系统设计方法,基于海图数据的分块结构模型,结合航海视觉监测方法,实现舰船智能导航系统的多波束数据特征检测,实现舰船智能导航的几何参数跟踪参数解析。分析可知,本文方法进行舰船智能导航的参数解析结果准确可靠,导航精度更高。3 系统软件实现

4 实验结果分析

5 结 语
