激光雷达与倾斜摄影技术融合的三维模型应用研究
2023-06-11常一萍邱福涛王洪蓝朝阳
常一萍 邱福涛 王洪 蓝朝阳
摘要 倾斜摄影测量技术是国际摄影测量领域近十年发展起来的一项高新技术。该技术通过从一个垂直、四个倾斜、五个不同的视角同步采集影像,获取丰富的建筑物顶面及侧面的高分辨率纹理。针对龙岩学院研究生公寓楼为代表的复杂高层不规则建筑物问题,运用无人机倾斜摄影测量技术进行三维模型数据获取,并使用大疆Phantom4 RTK进行倾斜摄影测量数据采集,通过DJI-Terra软件处理倾斜摄影数据,进行空中三角测量并生成三维模型,最后利用Dp-Modeler软件进行单体化模型精修。
关键词 DJI-Terra;倾斜摄影测量;Dp-Modeler
中图分类号 TU198文献标识码 A文章编号 2096-8949(2023)10-0016-03
0 引言
随着现代科学技术发展,无人机倾斜摄影测量成为测绘领域新的趋势和潮流[1]。无人机可以同时对多个角度进行倾斜摄影,并利用专业的建模软件建立三维实景模型,从而获取地物、地貌等特征属性,还可以将获取的信息以图片或影像等形式展现出来,便于后期对这些资料进行研究分析,通过可视化三维处理技术来实现现代化数字处理,创建以三维实景模型为基础的智慧城市建设。
1 研究方法
针对高层建筑飞行补拍,对中间与后侧复杂部分进行补拍,如图1所示。由于建筑物为复杂的高层建筑,因此,在外业飞行中采用了井字飞行和五向飞行两种方式,后期内业数据处理使用了Context Capture与大疆智图两种软件来处理。利用两种软件处理五向与井字飞行,得出的结果是大疆智图中五向飞行更适合后期的单体化模型精修,并采用Dp-Modeler模型精修软件对龙岩学院研究生公寓楼复杂高层的单体化模型重建。
2 外业测量
2.1 航测范围规划
使用大疆Phantom 4 RTK固定翼无人机地面站,对龙岩学院研究生公寓楼进行航测范围规划,新建工程选择3D飞行,飞行高度70 m,返航高度100 m,航向重叠率70%,旁向重叠率60%,速度每秒9 m,对该范围内进行了多视影像数据采集,总采集照片410张[2]。
2.2 无人机航测作业工作流程
根据指定航线及参数设置,无人机手动运行补拍,在航测过程中需要关注航测图像及POS数据的监测。通过云台角度产生的图像,可提供航测数据及POS数据。收集的数据信息有高度、航向、经纬度等。补拍图像及POS数据将在公寓楼中部及后部左右补拍航测工作结束后获得。
2.3 增设像控点
该测区使用CGCS2000坐标系、1985高程系统、高斯3度带投影和中央子午线117度,飞行前在测区范围内找到相应特征物的标志以便于摄像控点。使用司南RTK均匀地在测区范围四角布设10个像控点,为防止遗忘布设像控点的位置,在布设像控点的时候进行拍照留存。
3 内业数据处理
3.1 航测数据处理方案
倾斜摄影测量数据的处理主要是利用外业收集到的数据再转成内业的数据处理图像,而内业的数据处理软件非常多,该次航测后期分别采用的软件是Context Capture与大疆智图进行数据处理。
3.2 Context Capture建模实验
通过采集的照片计算出拍摄位置,空三计算是通过Master來完成。Engine是进行数据优化计算而形成三维模型,Master是前端操作界面[3],可通过Master导入影像数据,进行空三计算。
3.3 大疆智图建模实验
新建项目导入外业采集的自带POS信息的所有照片(航线规划及补拍影像共410),选择辅助坐标系为CGCS2000/3-degree Gauss-Kruger CM 117E(EPSG4548)。
3.3.1 空间三角测量计算
使用大疆Phantom4 RTK 无人机平台为基础采集航测数据,通过三维建模技术构建了该飞行器飞行姿态与相机成像参数之间的映射关系,并在此基础上建立相应的几何模型,通过大疆智图中空三计算步骤完成了该模型空三计算。
3.3.2 像控点管理与刺点
结束第一遍空三计算后,进入像控点选择坐标系统CGCS2000/3-degree Gauss-Kruger CM117 E(EPSG4548),导入外业采集的像控点坐标(共计10个),将进行手动刺点。刺点过程视图中会出现蓝色准星代表像控点预测位置。进行放大准星,则选择实际像控点位置进行刺点。在进行每张相片刺点时,会实时地更新像控点位置。为确保精度,每个像控点刺出6张图片,最终选择精度最准确的5个点作为空三优化像控点。
3.3.3 重建结果展示
导入航测数据后,对空三进行计算与优化,并选用空三XML文件,在像控点刺点后,选用高分辨率模型标准及OSGB、OBJ模型格式对三维重建模型进行建模[4]。
3.3.4 两套方案效果对比
通过Context Capture软件构建出的三维模型,无法识别补拍的照片且存在细小问题,故最终采用DJI Terra五向飞行模型进行Dp-Modeler模型精修。
4 基于Dp-Modeler的三维建模流程
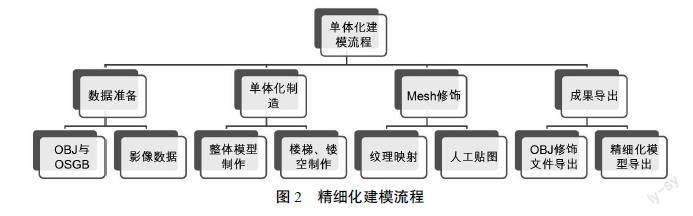
随着实景三维模型的广泛运用,模型场景修饰功能也将在众多行业发挥重要的作用。具体精细化建模流程如图2所示。
4.1 数据准备
4.1.1 工程建设流程
Dp-Modeler数据处理流程,打开DPSlnManager程序,设置解决方案路径,然后影像→航空影像→导入影像打开大疆智图空三XML文件,映射纹理路径→无畸变影像存储路径,导入到Dp-Modeler工程,点击Mesh→因为使用大疆智图需要选择大疆数据打勾再进行下一步骤,导入OSGB与OBJ模型格式,设置偏移值选择OSGB与OBJ文件中的XML文件,再导入OSGB与OBJ中的block文件,因大疆智图与Context Capture中导出的文件格式不一样,需要留意最后生成影像缓存。
4.1.2 Dp-Modeler进行建模
开启项目双击解决方案,界面上就会出现解决方案管理器、相机视图、工具箱,以及一些常用工具栏,例如影像投影视图、三维自由视图、Mesh编辑视图等。
相机视图:是指当测量点定位或建筑定位时,可以计算所有能看到测量点或建筑的摄像机,并将摄像机俯仰位置平放在相机视图上,可分为正摄影像(判断平面位置X、Y)和倾斜影像(判断高程位置Z)。紫色点表示全景图图像,三角形表示地面近景图像。在相机视图上单击任意点,图像投影视图自动出现点所对应的图像,点变为橘黄色,并在该点处出现一个矩形方框显示橘黄色投影线框,红色三角形是联动三维自由视图,指当前以基准点为中心观测模型方向,用于手动选取适合的影像辅助修改贴图。当三维自由视图为顶视图时,三角形会切换成圆形。黄色小点代表基准点位置,影像显示用于筛选影像类别,可全部显示,亦可单独显示航空影像、全景影像、地面近景影像等。
Mesh视图:Mesh视图中加载OBJ格式Mesh模型,主要用于模型修饰,其中包含重置视角、灯光开启关闭、撤销与重做等,以及單体化模型加载与卸载背面裁剪。开启此功能时,仅当观测Mesh正面时才加载模型,当视角观察Mesh模型以下时,Mesh模型不加载。完成白膜构建时,可打开Mesh,观察整个模型的整体轮廓以及部分细节模型结构。
4.2 单体化制作
该文研究的是龙岩学院研究生公寓楼的三维模型,首先采用的是大疆智图(DJI Terra)对外业飞行数据进行处理,得出整个公寓楼的三维模型。最后成图发现,大疆智图制作的三维模型存在破损和拉花的情况。为了对该公寓楼做一个完整的可视化三维模型,将对此三维模型进行一个精细化的模型重建精修。该文采用的是Dp-Modeler制图软件制作该学生公寓的可视化实景三维模型。
4.3 细部结构的模型构建
4.3.1 内部楼梯制作
由于该楼梯的制作需要较高要求,首先,确定楼梯的位置以及高度,其位置与高度要贴合实际的建筑图,需在自由视图中根据白膜以及原有的三维模型联合确定位置高度信息[5],并通过矩形工具将楼梯的宽度绘出。其次,挤出柱体到相应高度,再使用等分四边形对楼梯顶部与侧面进行等分面,然后对应面之间挤出柱体。最后,完成楼梯的制作。再根据楼梯的位置,对外围的栏杆进行挤出柱体,完成楼梯与栏杆的镂空制作。
4.3.2 屋顶镂空
在进行屋顶镂空制作时因为楼顶上还有半层屋面,所以先挤出半层屋面,再进行屋顶镂空制作,由于镂空处顶部有凹槽需要分步制作,首先制作出顶部外边两侧,定好基准面再分别绘制出顶部的范围,再把基准面定到需要挤出柱体的位置,之后进行中间凹槽的部分制作,最后完成整个楼顶的制作。
4.4 纹理映射
纹理映射分手动贴图和自动纹理映射两种,先使用自动纹理映射后使用手动贴图对模型纹理进行细化修改,要能够准确地反映出建筑物表面特征[6]。
4.5 单体化成果
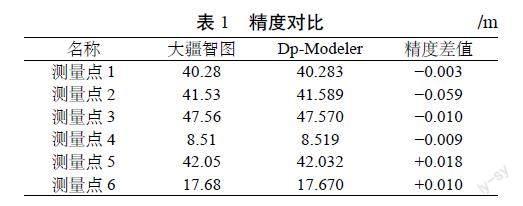
通过大疆智图得出的三维模型,由于整个模型存在破洞、拉花和部分结构残缺,于是采用Dp-Modeler进行模型的重建修复。最后对建筑立面孔洞进行补洞,纹理映射与手工贴图,最后得出精细化建模后的三维模型结果。模型精度分析如下:由模型精修完成后可知,墙面平整,整体效果较好,将对模型精修前后进行“模型量测距离”精度验证,根据大疆智图重建完成三维模型后采用标注与测量工具对柱子、立面、屋顶等进行尺寸测量,得出数据与精修完成后的模型进行尺寸精度对比,如表1所示。
数据对比发现,以大疆智图三维模型数据为基准,考虑到软件生成模型会产生误差,根据《三维模型规范》平面精度误差在±20 cm,由表1可知三维航测模型的精修是真实可靠。
5 结论
随着测绘技术日趋完善,无人机倾斜摄影测量技术更加有效地提高了工作效率,被广泛运用。该文利用无人机倾斜摄影测量技术对龙岩学院研究生公寓楼复杂高层进行测量,应用Context Capture与大疆智图处理外业数据,并结合Dp-Modeler软件进行手工建模,对公寓楼进行实景三维模型构建,总结得出一套对异形高层建筑物较为有效的解决方案,其主要优点:
(1)相比传统手工建模,自动化程度高,生产效率得到有效提高。
(2)通过Dp-Modeler中纹理映射贴图真实纹理,结合手工贴图的效果,使得建筑物模型让人们感到更直观更符合人眼视觉的真实世界,并充分地表现其细部特征,从而弥补了大疆智图三维重建中的缺陷。
(3)根据倾斜摄影测量拍摄获取的多源视角、高分辨率的影像数据为基础,可以实现模型与影像融合一体,使模型可以得到更准确的三维坐标数据,并清除了单一数据多源视角、分辨率等方面的限制,在作业时大大地提升了建模的速度和效能。
参考文献
[1]崔志然. 无人机倾斜摄影测量技术在房地一体化项目中的应用研究[D]. 西安:长安大学, 2020.
[2]胡军杰, 赵青芬. 无人机倾斜摄影测量三维建模精度评定及应用[J]. 装备制造技术, 2021(9): 39-41.
[3]姜如波. 基于倾斜摄影和近景摄影技术的实景三维模型制作[J]. 城市勘测, 2018(3): 95-98.
[4]张慧莹, 董春来, 王继刚, 等. 基于Context Capture的无人机倾斜摄影三维建模实践与分析[J]. 测绘通报, 2019(S1): 266-269.
[5]张光祖. 城市建成区高精度三维实景模型建模技术研究[D]. 淮南:安徽理工大学, 2020.
[6]杨珍. 基于Dp-Modeler的建筑物三维建模[J]. 测绘与空间地理信息, 2019(7): 11-13+21.
