一种脚踏式膝、踝关节康复训练装置的研制
2023-06-05徐桂元杨茂秀高丽兰吕林蔚张春秋
徐桂元,王 鑫,杨茂秀,高丽兰,吕林蔚,张春秋*
(1.天津市先进机电系统设计与智能控制重点实验室,天津理工大学机电工程国家级实验教学示范中心,天津 300384;2.天津金轮自行车集团有限公司,天津 301700)
0 引言
踝关节是人体下肢的主要承重关节之一,是人体移动、跳跃的启动器及缓冲器[1]。膝、踝关节损伤发病率高,其中踝关节在人体所有关节韧带损伤中占据首位[2],两关节损伤也往往会导致人体下肢活动功能障碍。有关膝、踝关节功能性损伤以及结构性改变的术后康复研究表明,利用康复训练装置进行康复训练可加快恢复进程、提高关节活动度[3-4],是一种有效的康复手段。
针对膝、踝关节的康复训练装置研究近年来发展较快,种类较多,按功能大致可以分为踝关节康复训练装置、膝关节康复训练装置与下肢康复训练装置3 种,不同类型各有优缺点。当前使用广泛的踝关节康复训练装置按结构分为理疗机、串联式康复设备、并联式康复设备以及踝足矫形器等类型[5-7]。其中传统的理疗机训练动作、模式都较为单一,康复训练不全面;串联式康复设备多为三自由度设计,控制方便,易测量实时扭矩,但结构普遍复杂臃肿,驱动较多,易造成误差累计;并联式康复设备设计体积小,训练自由度通常在2~6 之间,但正向位置解不唯一[8],机构转动中心易与关节转动中心不匹配[9],通过更换柔性驱动可一定程度上缓解该问题;踝足矫形器结构紧凑、人机耦合度高,主要研究集中在辅助行走时的人机交互控制策略上,且行走助力大多针对踝关节的跖屈、背伸动作,康复训练面较窄[10-12]。膝关节康复训练装置主要有卧式、坐式关节屈伸装置,踏板式步态行走设备以及外骨骼式膝关节康复设备。简单的膝关节屈伸类训练装置[13-14]往往受限于单一自由度,动作只能刺激固定肌群;步态行走设备能够实现膝关节参与多组动作训练,但其结构难以紧凑[15-16];而外骨骼式设备反馈控制复杂[17]。具有下肢整体康复功能的外骨骼类设计人机交互程度高,但对踝关节康复训练通常只有跖屈/背伸一个自由度。踝关节康复训练装置和膝关节康复训练装置针对性较强,不具备多关节康复训练功能,下肢康复训练装置可同时对膝、踝关节进行康复训练,但大多对踝关节康复训练自由度单一,因此缺少一种结构简单,适用于不同康复阶段患者,能同时对膝关节、踝关节多自由度康复训练的装置。
基于当前研究现状,本文基于骑行方式,设计一种结构简单,拥有主动、被动2 种训练模式的膝、踝关节康复训练装置,以适用于不同康复阶段的患者。通过设计机械结构,本装置可同时对踝关节跖屈/背伸、内翻/外翻以及膝关节屈伸动作进行训练,训练下肢关节运动协调性,提高患者的膝、踝关节稳定性。
1 膝、踝关节康复训练装置设计
1.1 结构设计
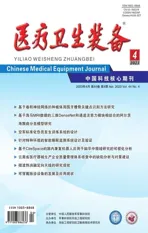
利用SolidWorks 软件进行建模,完成建模后的膝、踝关节康复训练装置结构如图1 所示。本装置由双向踏板结构、轨道凹槽结构、机架、外壳以及动力输出结构5 个部分组成,如图2 所示。装置踏板可以进行前后、左右2 个方向的旋转动作,可实现踝关节内、外翻和跖屈、背伸康复动作训练。
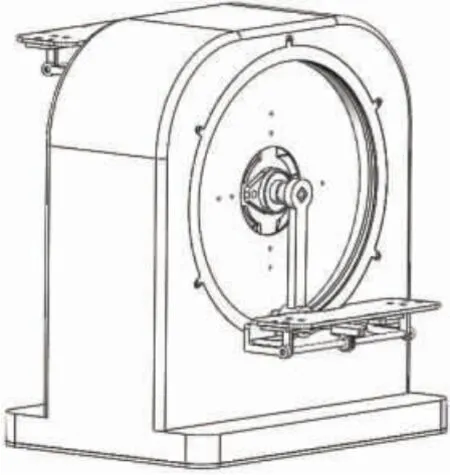
图1 膝、踝关节康复训练装置模型图

图2 膝、踝关节康复训练装置结构示意图
(1)双向踏板结构:双向踏板结构由踏板、踏板支撑件、踏板轴、可拆卸踏板架、伸缩杆、齿条、齿轮、轴承、开口直线轴承、曲柄以及双轴倾角传感器组成。伸缩杆通过开口直线轴承周向固定于可拆卸踏板架上,可相对于踏板架轴向直线运动。伸缩杆一端与轨道凹槽结构相连,另一端安装齿条,与带齿轮的踏板轴连接。踏板轴与踏板支撑件之间通过花键连接,并利用轴承装配在可拆卸踏板架上。可拆卸踏板架与曲柄连接。伸缩杆、踏板轴、可拆卸踏板架选用304 不锈钢制作,齿轮制作、齿条选用45#钢制作,曲柄选用Q235 钢材制作。
(2)轨道凹槽结构:轨道凹槽结构由圆形轨道、放置轨道的圆板以及固定轨道的圆板挡圈3 个部分组成。圆形轨道带有轴向延伸的凹槽和齿轮结构,凹槽通过连接伸缩杆的一端,可以引导伸缩杆做轴向直线运动。齿轮结构与动力输出结构连接,驱动轨道在圆板内做旋转运动。圆板挡圈用来限制轨道轴向位移,保证轨道在圆板内活动。圆板与圆板挡圈选用Q235 钢材制作,圆形轨道选用铝合金制作。
(3)机架:机架作为装置的支撑件,由方钢管以及钢板焊接而成,用于固定装置各个结构。
(4)外壳:外壳由壳体与底板组成,材质为塑料。
(5)动力输出结构:动力输出结构由TUNYO D5-120L-15-12DM 型直流伺服电动机、TUNYO 5GU-20RT 型直角减速器、齿轮减速机构、中心轴组成。中心轴与曲柄连接,齿轮减速机构输出轴上的齿轮与圆形轨道的齿轮啮合。齿轮减速机构使用单向轴承,可实现由电动机正、反转切换中心轴或后输出轴输出,实现不同训练模式的转换。齿轮减速机构的齿轮、齿轮轴以及中心轴材质均为45#钢,减速机构两侧固定板采用铝合金制作。
1.2 尺寸计算
在脚踏式膝、踝关节康复训练装置设计过程中,由于双向踏板结构和轨道结构需要连接配合,因此需要对2 个结构的具体尺寸进行计算。双向踏板、轨道结构如图3 所示。双向踏板结构在转动过程中,伸缩杆相对于踏板架做直线运动,伸缩杆件头部与齿条相连,齿条长度为T。伸缩杆尾部为圆片结构,圆片直径D、厚度L、轨道凹槽宽度X、轨道凹槽偏移角度θ 之间满足关系式Dtan θ+L≤Xsec θ。踏板架高度为H,踏板宽度为W,圆形轨道内径为R,踏板轴与伸缩杆的距离为d,为避免齿轮齿条发生脱齿现象,取T=4Rtan θ。踏板的架高度过低会影响踏板外翻角度φ 的大小,由踏板、轨道结构可知φ=,且φ 取值范围为0°~30°。踏板架高度过高会增大装置内、外翻驱动力矩,继而增大齿轮齿条径向力。根据曲柄长度标准,选择曲柄长度为165 mm,轨道内径R 取344 mm,轨道凹槽偏转角度θ 取1.5°,伸缩杆与踏板轴的距离d为30 mm,为防止踏板底部与伸缩杆发生干涉,踏板架高度H 应≥,综上H 取35 mm。
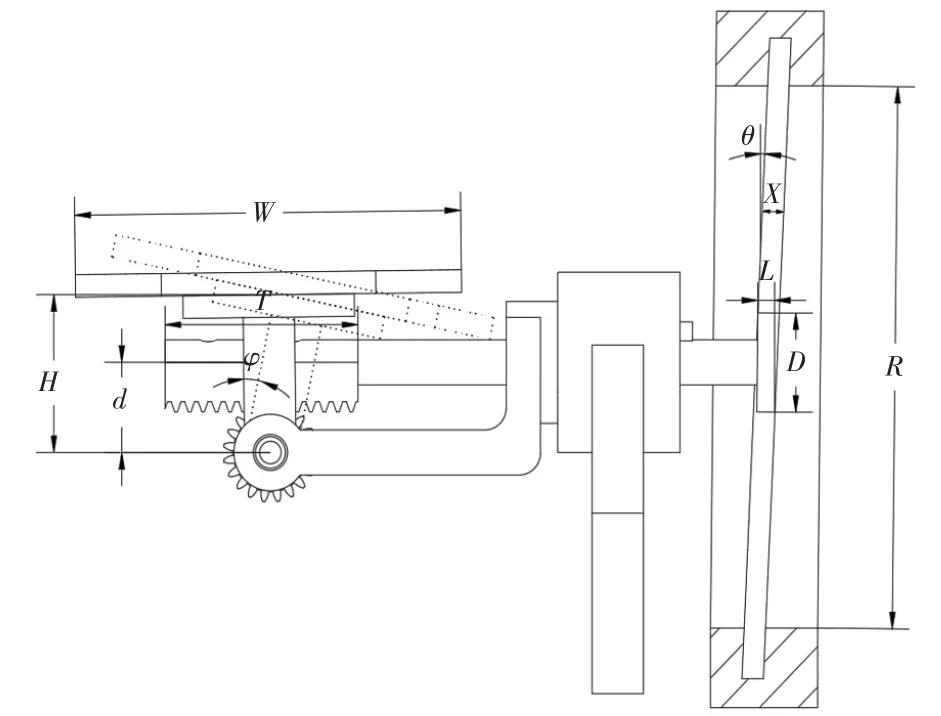
图3 双向踏板、轨道结构尺寸示意图
1.3 功能模式
本装置设计2 种康复训练模式:人体被动训练模式和人体主动训练模式。
(1)人体被动训练模式。
人体被动训练模式适用于踝关节损伤康复初期的患者,主要分为单一踝关节康复训练和膝、踝关节康复训练2 种模式。
①单一踝关节康复训练模式:单一踝关节康复训练模式采用两脚并行训练方式,训练过程中曲柄无转动,踏板与脚的位置保持静止,电动机正转带动轨道转动,从而带动周向固定于踏板上的伸缩杆进行轴向运动,带动踏板与踝关节做内、外翻动作。单一踝关节康复训练模式内部动力传输方式如图4(a)所示。
图4 膝、踝关节康复训练装置不同模式内部动力传输方式示意图
②膝、踝关节康复训练模式:膝、踝关节康复训练模式采用人体被动骑行训练方式,既可以双腿训练也可以单腿训练,单腿、双腿之间的切换是利用可左右移动的传动齿轮同连接左右曲柄的左右轴选择性啮合来实现。在此过程中,电动机反转驱动曲柄与踏板转动,踝关节做内、外翻动作训练和跖屈、背伸动作训练,以及膝关节屈伸动作训练。其中,踝关节内、外翻动作作为踏板周转伴随性动作,具有强制性,踝关节跖屈、背伸动作以及膝关节屈伸动作在骑行过程中实现,具有自主性。膝、踝关节康复训练模式内部动力传输方式如图4(b)所示。
以上2 种模式的动力输出方向的转变由驱动电动机的正反转以及安装在齿轮轴上的单向轴承实现。在被动康复训练时,为保证人体踝关节安全,设计踏板底部带有倾角传感器,可实时测量踏板内、外翻角度。装置使用的起始位置处,踏板翻倾角近似为0°,处于水平状态。在装置使用时,踏板做内、外翻运动,踝关节不会长时间处于内翻、外翻状态。当踏板停止位置处于内翻或外翻状态时,通过倾角传感器的角度反馈信号驱动控制电动机继续运行至踏板内、外翻角度为0°~5°范围内停止,避免人体踝关节长时间处于内翻或者外翻状态。
(2)人体主动训练模式。
人体主动训练模式用于增强踝关节稳定性,要求患者具备一定的活动能力,适用于踝关节损伤患者后期康复训练,主要包括骑行训练模式和自由踏板训练模式2 种。
①骑行训练模式:装置无动力,人体主动骑行训练,由电动机与齿轮减速机构提供固定阻抗,实现踝关节内、外翻,跖屈、背伸以及膝关节屈伸训练。
②自由踏板训练模式:通过拆卸连接轨道和踏板的伸缩杆,使踏板内、外翻动作不受限制,实现自由踏板结构。此时踏板可以在内外、前后两自由度上实现自由转动。
2 装置动力学仿真
2.1 运动学仿真
利用ADAMS 软件对膝、踝关节康复训练装置进行运动学仿真,分析装置运行的可行性。
在对膝、踝关节康复训练装置进行运动学仿真之前,查阅中国人体尺寸、体质量的相关数据,在装置模型上添加身高为175 cm、体质量为65 kg 的人体等比例下肢腿部坐姿模型,座位与机构转动中心距离为52 cm。将康复训练装置模型导入ADAMS 软件,设置约束并添加驱动,如图5 所示。
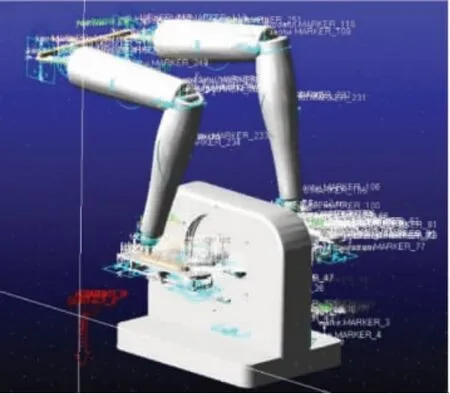
图5 运动学仿真示意图
在仿真过程中,为便于约束双向踏板的活动自由度,对踏板支撑结构添加一个与地面平行的约束,使踏板结构在仿真过程中始终与地面平行。因此仿真时踏板前后俯仰角度为0°,而实际装置运行过程中,人体脚部与踏板并不一定平行于地面,会有一定的活动角度。
在踝关节的相关研究中[18-19],通过实验采集测得的人体日常活动中踝关节跖屈、背伸、内翻、外翻动作相关数据见表1。
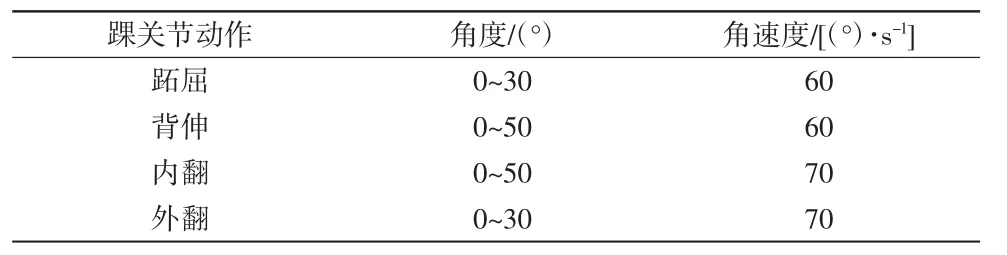
表1 踝关节内翻、外翻、跖屈、背伸动作数据统计
通过运动学仿真可以得到在骑行训练时,膝、踝关节训练角度范围如图6 所示。从图中得到的数据可以看出,在仿真过程中,踝关节内、外翻最大角度分别为37°、25°,活动角度范围为62°,跖屈、背伸动作最大角度分别为15°、16°,活动角度范围为31°。膝关节屈伸动作训练角度范围为61°~101°。以上两关节的3 组动作角度范围均在关节的正常活动范围内,保证了装置在对膝、踝关节康复大角度训练过程中的安全性。
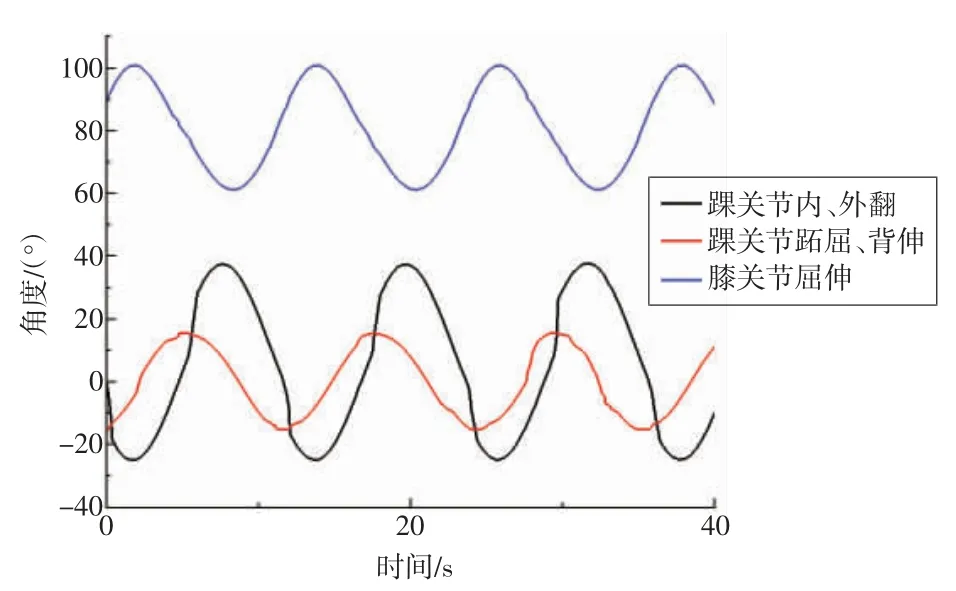
图6 膝、踝关节训练角度范围
除了关节角度安全范围,还需考虑人体关节运动速度的影响。为了适配踝关节在运动时的角速度范围,对装置在不同运行速度下进行仿真,分别测试装置转速为30、25、20、15 r/min 时踝关节内、外翻角速度,结果如图7 所示。从图中可以得出装置在转速为25、20、15 r/min 时,踝关节内、外翻角速度小于70°/s,在踝关节正常内、外翻运动角速度范围内(因本装置对踝关节跖屈、背伸动作的训练幅度较小,故此处不考虑跖屈、背伸角速度的影响)。考虑人体舒适度以及装置的康复训练效率,采用转速n=15 r/min 作为装置正常训练速度以及零部件选型的额定转速标准。
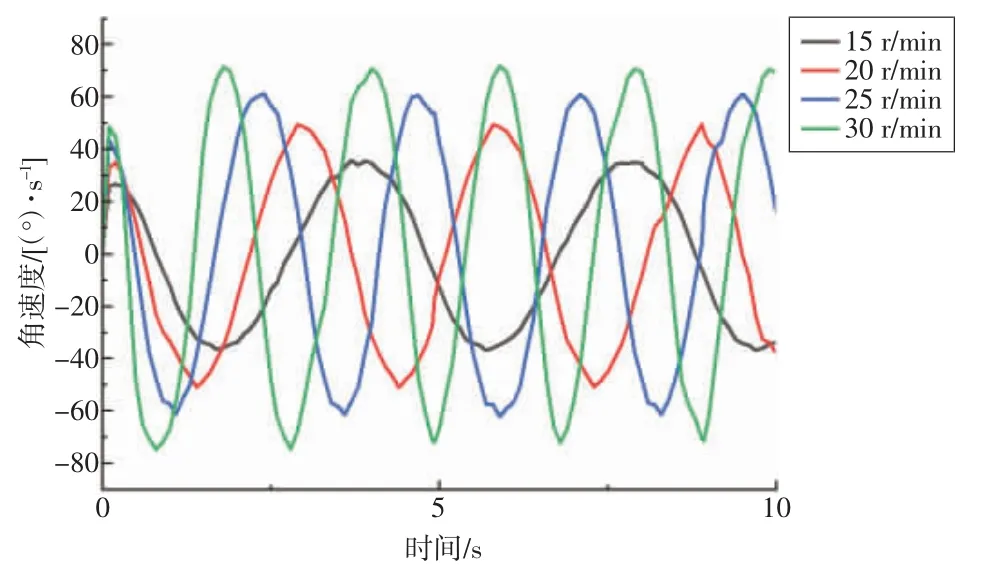
图7 膝、踝关节康复训练装置不同转速下踝关节内、外翻角速度
2.2 动力学仿真
采用人体相关统计学数据,对人体下肢模型质量进行赋值,模拟正常人体腿部质量。仿真过程中测得的曲柄轴扭矩和踝关节内、外翻驱动扭矩情况如图8 所示。曲柄轴处扭矩即装置带动人体康复训练过程所需的扭矩,启动扭矩大小为13 N·m,循环扭矩T 最大为27 N·m。从图中可以看出,装置踝关节内、外翻训练动作最大驱动扭矩为4.3 N·m。根据踝关节的运动参数指标,内、外翻扭矩大小在6 N·m左右,仿真结果偏小。可能是由踝关节距骨关节窝处摩擦系数设置与真实人体踝关节转动阻抗之间的差距造成的。
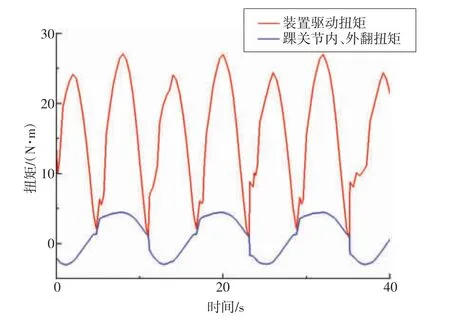
图8 膝、踝关节康复训练装置驱动扭矩及踝关节内、外翻扭矩
装置运行过程中,伸缩杆起到了拉伸踏板做内、外翻动作的作用,伸缩杆同时受到轴向力与径向力的作用,又因为其为长轴状结构,容易发生弹性变形。通过测量伸缩杆头部Maker 点受力情况,得到其所受径向力随踏板内、外翻角度的变化情况如图9(a)所示,其中径向力最大为213.8 N。伸缩杆所受轴向力大小情况如图9(b)所示,其中内翻轴向力最大为416 N,外翻轴向力最大为297 N。
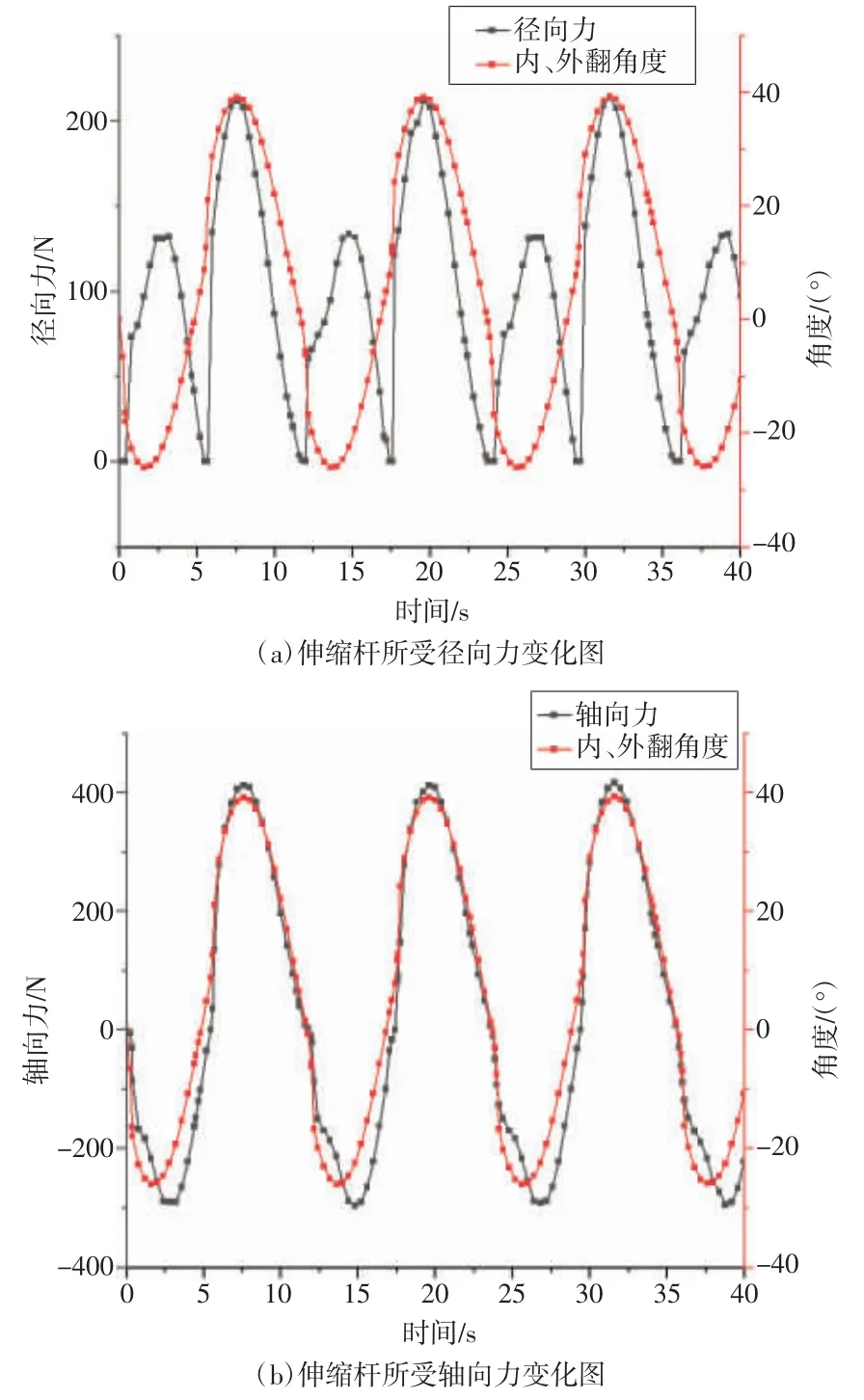
图9 伸缩杆所受力变化
在仿真过程中,将得到的装置额定转速下的循环扭矩最大值T=27 N·m 作为装置运行所需的额定扭矩,利用公式,则可以得到装置运行功率为42.4 W。装置减速机构的齿轮传动效率η=0.69,考虑到装置多处连接存在摩擦,为装置驱动功率留有3 倍安全裕度,故安全裕度S=3,则装置所需功率为P=·S=184.3 W。因此选用200 W 的TUNYO D5-120L-15-12DM 型直流伺服电动机,其额定扭矩为0.637 N·m,额定转速为1 500 r/min。减速器选用TUNYO 5GU-20RT 型直角减速器,减速比为20∶1,装置驱动中心轴的减速机构的减速比为5∶1,驱动圆形轨道的减速比为25∶1,满足装置驱动需求。
3 有限元仿真分析
在设计伸缩杆与踏板轴之间的齿轮齿条传动配合时,要考虑伸缩杆受径向力发生形变对齿轮齿条配合的影响,防止发生脱齿现象对训练中的踝关节造成二次损伤。同时,装置用于固定轨道的圆板受到伸缩杆轴向力的作用发生形变,继而会影响伸缩杆伸缩长度,最终会造成训练过程中踏板结构内翻、外翻角度的变化。为研究其形变对装置使用以及效果的影响,对伸缩杆和圆板2 个零件进行有限元分析。
基于以上测得的力学数据,利用ANSYS 有限元分析软件对伸缩杆零件进行分析,可以得到其受力形变情况如图10(a)所示。在安装齿条的杆件头部一端,由于齿轮齿条连接产生的径向力作用,形变量较大,最大形变量Δ1=2.7 mm,齿轮齿条啮合处形变量在0.8~2.07 mm 之间。为保证齿轮齿条啮合的准确性,防止齿轮齿条脱齿现象的发生,在齿轮配合中齿轮分度圆半径与齿顶圆半径之差大于伸缩杆形变量:Δ≤(m 为齿轮模数,z 为齿轮齿数),即Δ1≤m,在康复训练装置设计中,齿轮模数m=3 满足要求。对连接轨道的圆板进行分析,动力学仿真所得到的内翻轴向力最大为416 N,外翻轴向力最大为297 N,但由于圆板形变导致翻转角度变化,继而造成内、外翻轴向力一定程度增大。故在有限元分析时,将内、外翻最大轴向力适度增大,内翻轴向力增大为450 N,外翻轴向力增大为330 N,得到圆板形变情况如图10(b)、(c)所示。内翻时最大形变量Δ2=1.589 mm,外翻时最大形变量Δ3=1.258 mm。圆板在踏板内、外翻时的形变会使伸缩杆运动行程变大,进而导致踏板在内、外翻时角度变大,踏板内、外翻角度增量θ1、θ2可利用公式θ=(i=2,3)计算。通过计算得到内翻角度增大6°,外翻角度增大5°。因此,装置在实际运行过程中,由于部分位置受到力的作用而发生形变,最终会对踝关节内、外翻这一动作的训练角度产生影响,内翻最大角度增大为43°,外翻最大角度增大为30°,增大后的踝关节内、外翻角度范围增大到73°,在人体踝关节正常活动最大角度范围内。由此,可以得出在装置实际运行过程中产生的微小形变会对装置的动作训练角度产生一定影响,但并不影响装置的实际使用效果。
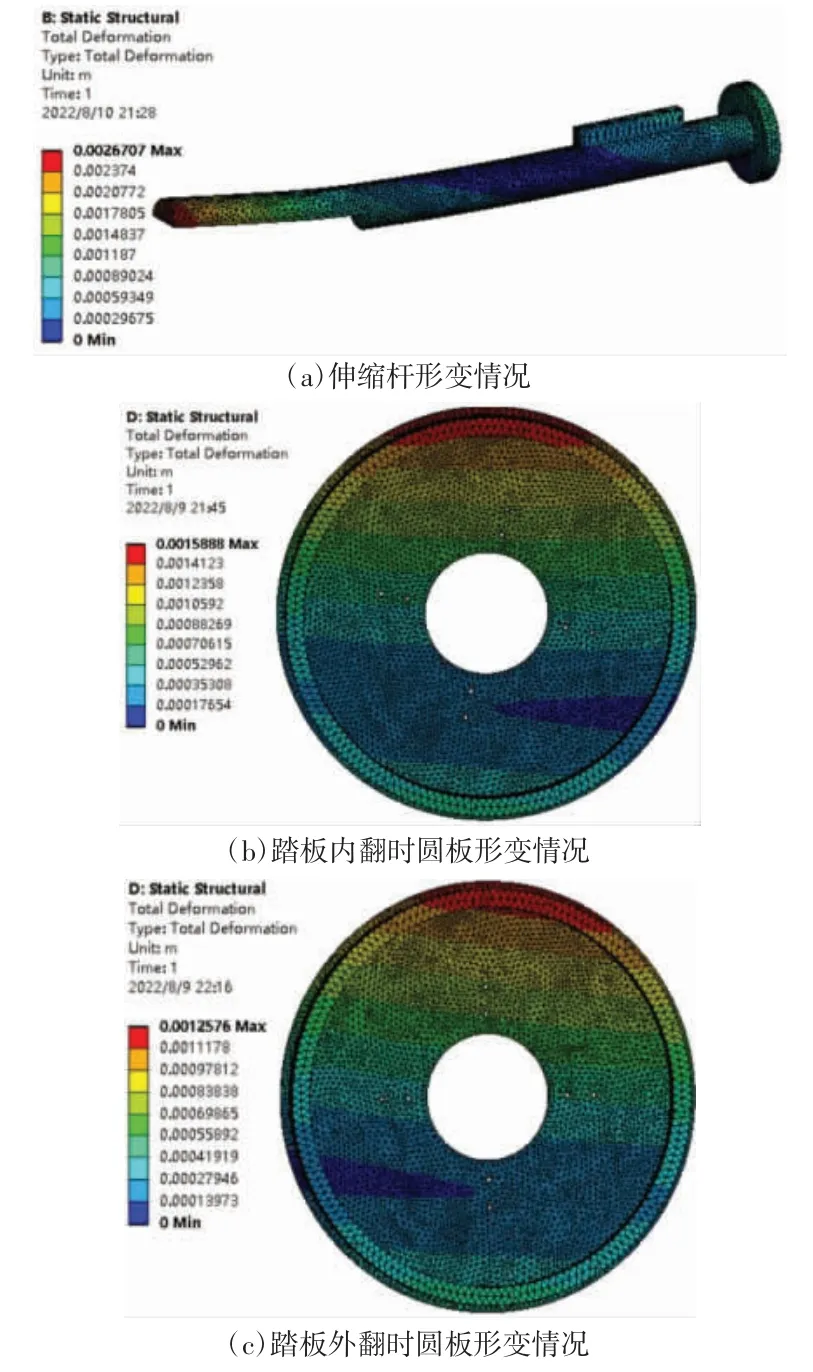
图10 伸缩杆、圆板有限元仿真形变情况
4 结语
随着康复领域研究的不断发展,康复理念得到进一步推广,患者的功能训练越来越得到重视,有关膝、踝关节康复训练装置的使用也越来越广泛。本文研制的膝、踝关节康复训练装置能够同时对下肢踝关节两自由度、膝关节一自由度进行训练,或踝关节内、外翻针对性训练,踝关节内翻/外翻、跖屈/背伸训练角度分别为43°/30°、15°/16°,膝关节屈伸训练角度范围为61°~101°,符合人体膝、踝关节正常活动角度规律。本装置训练动作相关数据符合人体运动学标准,且使用安全、体积小、结构简单、操作方便、功能较为全面,应用场景比较广泛。但本装置仍存在不足之处:装置轨道凹槽与伸缩杆接触位置易产生较大摩擦,需要优化结构与选材改进,以提高装置康复效率。