基于PWM的电控精量喷雾控制系统设计与试验*
2023-06-05王亚林印祥杨爽姚海斌马文鹏金诚谦
王亚林,印祥,杨爽,姚海斌,马文鹏,金诚谦,2
(1. 山东理工大学农业工程与食品科学学院,山东淄博,255000;2. 农业农村部南京农业机械化研究所,南京市,210014)
0 引言
作物病虫草害防治是农业生产中的重要环节,决定着农作物的质量和产量,目前,施用农药仍然是最有效和使用最广泛的防治方式[1-3]。我国是农药生产和使用大国,农药生产技术处于国际先进水平,但植保机械和农药使用技术却比较落后,存在农药有效利用率低、环境污染严重、残留超标等问题[4-6]。传统高地隙喷杆喷雾机作业时各喷头喷药量相同,而农田病虫草害的区域性分布则要求喷药机根据田间实际情况按需施药[7-9]。因此,实现每个喷头独立控制喷药量,使得控制系统能根据植保机械的行进速度和田间病虫草害及作物生长的差异性实时自动调整农药的施用量,对保护环境以及提高变量喷雾精准度有重要意义[10-11]。
国内外专家从不同方面对变量喷雾技术进行了深入研究。Grella等[12-13]研究了PWM占空比和前进速度对葡萄树喷雾覆盖率的影响,试验结果表明在实际工作中占空比和前进速度对喷雾均匀性的影响不大。杨文超等[14]基于北斗定位系统和机器视觉,设计了一种变量喷雾系统,研究了植株稀疏度和车体速度对喷雾覆盖率的影响,实现了依据植株稀疏度和车速进行变量施药。王润涛等[15]基于模糊控制,设计了一种车速跟随自适应变量喷雾系统,研究了不同车速下单位面积喷药量的误差。王定康等[16]针对变量喷雾系统响应时间较长等问题,设计了一种基于单神经元PID控制的变量喷雾系统,实时调节PID参数,精准调节喷雾流量。陈晓明[17]设计了实时精确变量喷雾系统,在喷药时对药液浓度进行实时监测和调整。Lebeau等[18-19]设计了基于喷杆速度变化的PWM变量施药控制系统,研究了喷杆速度变化对喷雾沉积分布均匀性的影响,经过试验采用频率为16 Hz 的控制器进行补偿。Mangus等[20]设计了PWM喷雾控制系统,研究了行驶速度和喷雾带宽度变化对喷雾覆盖度的影响。上述研究对PWM变量喷雾的喷雾特性和控制策略提供了重要理论依据,但是在田间喷雾作业中,还需要提高喷雾控制器的响应速度及控制精度。
针对现有变量喷雾系统精准化程度低、农药有效利用率低等问题,设计了基于PWM的电控精量喷雾控制系统。该控制系统主要由上位机、喷雾控制器、电子开关、电控喷嘴体组成,输出多路PWM信号独立控制每个喷头,实现每个喷头流量的实时调节。通过不同压力下实际占空比和设置占空比的对比试验来验证系统的实际控制效果,以期实现喷头独立控制,提高变量喷雾精度。
1 精量喷雾控制系统设计
1.1 精量喷雾控制系统的设计需求
针对现有变量喷雾系统精准化程度低、农药有效利用率低等问题,本文设计了基于PWM的电控精量喷雾控制系统,所研制的电控精量喷雾控制系统安装在自走式高地隙喷药机喷杆上,如图1所示,由于自走式高地隙喷药机的喷幅较宽,在喷雾覆盖范围内施药量是不同的,需根据车速、作物、病虫害等情况调整,所以需要独立控制每个喷头,实现施药量的实时精准调节。为了满足喷药机基本喷雾参数和喷头独立控制的需求,控制系统需要输出多路PWM信号,独立控制每个PWM变量喷头,根据500 L、1 000 L、1 500 L容量的自走式高地隙喷药机的喷头数量,分别需要18、30、36路PWM信号。要求精量喷雾控制系统能够输出多路PWM信号独立控制每个喷头,为了便于扩展和提高系统稳定性,采用分组控制,每个控制器输出6路PWM信号。为了保证喷头独立控制时的控制精度和工作性能,对电控喷嘴体提出如表1所示的技术指标。

表1 电控喷嘴体主要技术指标Tab. 1 Main technical indexes of electronic control nozzle body

图1 自走式高地隙喷药机
1.2 精量喷雾控制系统构成
基于PWM的电控精量喷雾控制系统主要由上位机、喷雾控制器、GNSS接收机、电子开关、电控喷嘴体等组成,如图2所示。上位机用于输入喷药量,并将其发送给喷雾控制器,同时用于实时显示系统工作状态;GNSS接收机选用美国天宝BD982双天线定位定向接收机,用于实时采集作业设备的位置和速度信息,并通过CAN总线发送给喷雾控制器;喷雾控制器以PIC18F258单片机作为核心,根据接收到的喷药量和作业速度信息,输出PWM控制信号,控制多个电子开关通断;电控喷嘴体与电子开关相连,在电子开关闭合时,喷头打开,药液喷出,在电子开关断开时,喷头关闭,药液停止喷出。通过改变PWM信号的占空比和频率就可以改变喷雾流量的大小。

图2 PWM电控精量喷雾控制系统组成
2 硬件系统设计
2.1 电控喷嘴体
如图3所示,电控精量喷嘴体主要由电磁吸合机构、连接螺帽、双向通水阀、喷体、喷嘴等部分组成。

图3 电控喷嘴体
电磁吸合机构主要包括电磁线圈外壳、电磁线圈、绕线骨架、定铁芯、阀芯、复位弹簧、套筒等。当电磁吸合机构的线圈通电时,其内部磁场磁化定铁芯、阀芯,阀芯受磁场力作用被吸附远离双向通水阀出水口,药液从喷嘴出水口喷出;当电磁线圈断电时,磁场消失,阀芯在复位弹簧的作用下向远离铁芯的一端移动将双向通水阀的中央通孔堵住,药液被阻断。通过调节PWM占空比,即喷头单个周期内的通断时间,就可以调节喷雾流量。
2.2 单片机选型
该控制系统控制器单片机选用Microchip公司的PIC18F258单片机,共有28个引脚,最大时钟频率为40 MHz,可以与CAN总线接口、I2C、SPI和USART进行通信,且包含AD转换模块和CCP模块,可以输出PWM信号,工作温度为-40 ℃~85 ℃。该单片机具有工作稳定性和可靠性高、代码效率高、外围接口多和低功耗等优点,能够适应农业场景下的恶劣环境,能够满足精量喷雾控制的需求。
2.3 喷雾控制器
喷雾控制器作为PWM电控精量喷雾控制系统的核心,用以接收上位机发送的喷药量并将之转换成PWM信号控制电子开关通断的频率和占空比,使药液按照设置的喷药流量喷出。喷雾控制器以PIC18F258单片机作为中央处理器、PCA82C250为CAN总线芯片、MAX232为电平转换芯片、MOS管作为电子开关,此外还包括时钟电路、复位电路等。喷雾控制器原理框图如图4所示。
电源通过电源稳压模块与单片机相连,保证工作时可以稳定的为单片机提供电源。上位机通过CAN总线与单片机相连,将预先设定好的喷药量发送给单片机。喷雾作业过程中,根据实时接收的喷药量,并换算成PWM信号,通过改变PWM信号的占空比,控制每个电子开关的通断时间,独立控制每个电控喷嘴体的喷雾流量。变量喷雾要求独立控制每个喷头的喷雾流量,自走式高地隙喷药机的喷头数量大部分大于18个,需要多个控制器进行控制,为实现多个喷雾控制器和上位机的实时传递,变量喷雾控制系统设计了CAN总线模块,实现控制单元和各个子系统的信息传递,CAN总线模块的电路原理图如图5所示。

图5 CAN总线模块
变量喷雾控制系统各个模块的通信接口不一致, 需要进行RS232串口和TTL串口转换, 为了实现各模块间的正常通信, 设计了串口转换模块, 其电路原理图如图6所示。控制器实物如图7所示,PIC单片机通过CAN总线与上位机通信,接收上位机设置的喷药量,并将作业参数返回到上位机。

图6 串口转换模块

图7 喷雾控制器实物图
PIC单片机通过CAN总线模块与其他控制器进行通信,将上位机接收到信息发送到每一个控制器。每个控制器包括六个电子开关,电子开关电路图如图8所示,每个电子开关由一个MOS管、三个电阻、一个LED灯组成,通过RC口输入的电平信号控制电子开关的通断,RC口输入高电平信号时,电子开关闭合,LED灯打开,喷头喷出药液;RC口输入低电平信号时,电子开关断开,LED灯关闭,喷头停止喷出药液。

图8 电子开关电路图
2.4 上位机
为了更好地进行操作和显示系统工作状态,本文采用HMI串口屏设计了上位机界面,进行信息显示和数据发送。上位机界面如图9所示, 包括主页面、手动输入页面和显示页面,主页面可以选择常量模式、手动输入和处方图施药。常量模式为每个喷头都是最大流量进行喷雾;处方图施药是农机当前位置,自动从处方图中寻址读取相应的施药量,按照设定好的处方值进行喷雾;手动模式是手动输入每个喷头的流量发送到单片机;显示页面用来显示喷雾压力、喷雾流量、剩余药量、前进速度、经纬度等作业参数。上位机通过串口与单片机进行通信,将每个电控喷嘴体的喷药流量发送至PIC单片机,并将喷雾工作的相关信息传输到HMI串口屏实时显示。本文所采用的串口屏分辨率为800像素×480像素,工作温度为-20 ℃~+70 ℃,工作电压为4.65~6.5 V,采用ASCII码字符串进行串口通信。

(a) 主页面

(b) 处方施药页面

(c) 设置页面
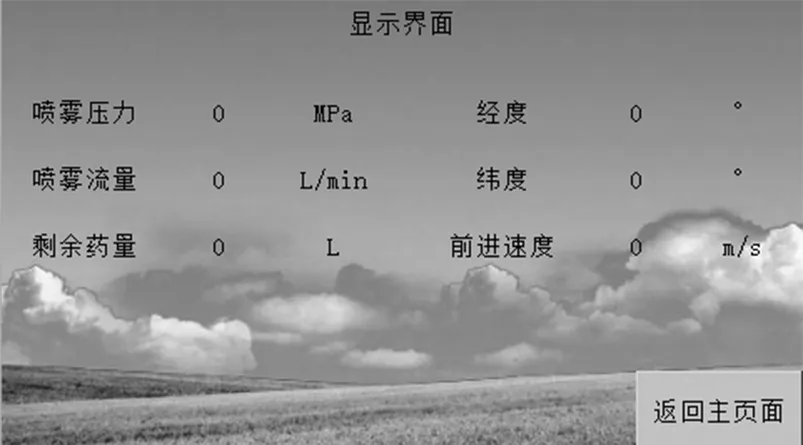
(d) 显示页面
3 软件系统设计
3.1 流量调节算法
本研究采用喷雾控制器输出的多路独立可调的PWM信号控制变量喷头实现变量喷雾。PWM脉宽调制技术是利用处理器的数字输出对模拟电路进行控制,通过改变脉冲信号的频率和占空比,进而改变高低电平的输出时间。PWM占空比为单个脉冲周期高电平输出时间与脉冲周期之比,脉冲信号占空比计算公式如下。
(1)
式中:α——脉冲信号占空比;
t0——导通时间(高电平输出时间),s;
T——脉冲周期,s。
PWM占空比越大,高电平输出时间越长,喷头打开时间越长,单位时间内喷出药量越多;反之,高电平输出时间越短,喷头打开时间越短,单位时间内喷出药量越少。所以电控喷嘴体实际流量、脉冲信号占空比和电控喷嘴体最大流量存在以下关系。
Q0=a·α+b
(2)
式中:Q0——电控喷嘴体实际流量,L/min;
a、b——常数。
实际作业过程中,机器的行驶速度是变化的,作业速度变化大将直接导致单位面积施药量不均匀,为了保证喷雾效果,在车速变化时要实时改变喷雾流量。机器行驶速度、施药量、喷幅和喷雾流量之间存在以下关系。
(3)
式中:Q——施药量,L/hm2;
v——机器行驶速度,km/h;
l——作业幅宽,m。
根据式(2)和式(3)可以得到脉冲信号占空比、机器行驶速度和施药量之间的关系。
(4)
3.2 多路PWM信号
变量喷雾控制系统通过控制器输出的多路独立可调的PWM信号控制每个电控喷嘴体的通断时间,其控制流程图如图10所示。

图10 PWM信号输出流程
因为每个控制器需要独立控制多个喷头,所以首先识别出喷头ID,根据每个喷头设置的不同喷药量计算出每个喷头的占空比。PIC单片机有自带的PWM模块,首先将PIC单片机的CCP模块设置成PWM模式,并将PWM引脚设置为输出,通过单片机的定时器进行计时,设置PWM信号的占空比,输出PWM信号。
3.3 软件设计
根据变量喷雾的基本作业要求、流量调节算法等要求,基于MPLAB IDE开发环境开发了精量喷雾控制程序,设计了PWM电控精量喷雾控制系统的工作流程,如图11所示。系统初始化后,PIC18F258单片机首先接收上位机输入的喷药量,并根据式(4)将喷药量换算成PWM信号,并输出多路PWM信号控制每个电子开关的通断,每个电子开关控制一个电控喷嘴体的通断,当电控喷嘴体打开时药液喷出,电控喷嘴体关闭时药液停止喷出,通过改变单位时间内电控喷嘴体的通断时间,即可改变喷雾流量,实现精量喷雾。

图11 PWM电控精量喷雾控制系统工作流程图
根据图11所示的工作流程,本文在单片机开发环境下,完成了PWM精量喷雾控制程序的编写,并利用PICkit3烧录器将程序下载到PIC18F258单片机,进行调试和试验验证。
4 试验与结果分析
为评价所设计的PWM电控精量喷雾控制系统的工作性能,将所研制的控制系统装置安装于精量喷雾测试实验台上,于2022年9月在山东理工大学农业装备实验室对控制系统的实际控制效果进行试验。
4.1 性能试验
作为PWM精量喷雾技术的主要参数,占空比直接决定了喷雾流量的大小,如果喷头单个周期内的通断时间与设置的通断时间误差较大,会导致喷雾精度下降。为验证所设计的PWM电控精量喷雾控制系统的控制精度,测试了喷雾系统的响应时间和喷嘴喷雾的实际占空比。
试验装置包括精量喷雾测试实验台、高速相机、补光灯、喷雾控制器、电控精量喷嘴体等,如图12所示。喷头上连接的喷嘴为11003标准扇形喷嘴,喷雾角为110°。试验时,用清水代替药液,在上位机界面中输入相关参数,其中工作压力分别为0.3 MPa、0.4 MPa和0.5 MPa,脉冲频率设置为10 Hz,占空比从30%递增到80%,每次递增1%。启动精量喷雾实验台,用实验台上安装的压力表测量工作压力,通过控制电机转速输出不同的工作压力,得到需要的工作压力。等系统稳定后,采用高速相机进行拍摄,将单个周期内有喷雾雾滴的照片数量乘以高速相机的帧时长,得到电控精量喷嘴体单个周期内的导通时间;将喷雾信号发出到喷头完全喷雾之间的照片数量乘以高速相机的帧时长,得到系统响应时间。为保证测量的准确性,高速相机测量每组占空比下5~6个周期喷雾时间,取中间3组通断时间数据的平均值求出单个周期内的喷雾时间。

图12 试验平台
本文采用的高速相机为Phantom VEO 410,选取的拍摄速率为5 200帧/s,曝光时间为200 μs,图片像素为1 280×800。
为评价所设计的PWM电控精量喷雾控制系统的控制精度,对占空比测量结果进行计算分析,表2为系统压力分布为0.3 MPa、0.4 MPa、0.5 MPa时试验数据分析结果。由表2可知在系统压力分别为0.3 MPa、0.4 MPa、0.5 MPa,电控喷嘴体通断时间误差最大值分别是2.5 ms、2.98 ms、2.9 ms,相对误差最大值分别是6.6%、6.6%、6.8%,RMS误差分别为2.37 ms、2.54 ms、2.27 ms,系统最大延时时间分别为0.179 s、0.176 s、0.167 s。各系统压力下,其相对误差和RMS误差均较小,系统延时时间较短,表明控制系统具备良好的控制精度和稳定性,能够满足精量喷雾控制的基本要求。

表2 试验数据分析结果Tab. 2 Analysis results of test data
图13为实际占空比与设置占空比的对比分析图,由图13可知在脉冲频率10 Hz,占空比范围30%~80%,在系统压力分别为0.3 MPa、0.4 MPa、0.5 MPa时,实际占空比曲线与设置占空比曲线基本重合,实际占空比曲线线性度高,线性回归决定系数分别为0.983 9、0.982 1和0.988 3。表明所研制的电控精量喷雾控制系统具备快速收敛性且稳定性、准确度较高,在不同的系统压力下能够满足精量喷雾的控制需求。

(a) 0.3 MPa

(b) 0.4 MPa

(c) 0.5 MPa
4.2 流量测试
理论上,喷雾压力和频率一定时,喷雾流量与占空比成线性关系,为了验证喷雾流量与占空比的关系,本文在0.3~0.5 MPa压力下,10 Hz频率,20%~100%占空比下测量11003标准扇形喷嘴的流量。
在喷雾频率为10 Hz,喷雾压力分别为0.3 MPa、0.4 MPa、0.5 MPa。占空比20%~100%范围内,每隔4%测试喷雾流量。试验时,用清水代替药液,用量杯接住喷雾的液体,用秒表记录30 s的喷雾时间,用1 500 mL 量杯测出30 s内液体体积,进而计算得出喷头流量,每次试验重复3次,取平均值。
占空比与流量关系变化如图14所示,试验结果表明,喷头流量与喷雾压力和占空比有关,在喷雾压力和频率一定时,占空比20%~80%时,喷头流量与PWM占空比成线性正相关关系,达到一定占空比之后(80%~100%)流量增长速度减慢。将试验得到的数据进行线性拟合,0.3 MPa、0.4 MPa、0.5 MPa下的线性拟合度分别为0.958 6、0.956、0.953 4,可以看出压力变化对流量与占空比的拟合关系影响较小。通过线性拟合得到不同压力下流量与占空比的关系。

图14 不同压力下喷头流量与PWM占空比的关系
0.3 MPa压力下喷头流量与占空比的线性方程
Q0=0.012 1a+0.182 8
0.4 MPa压力下喷头流量与占空比的线性方程
Q0=0.128a+0.249 6
0.5 MPa压力下喷头流量与占空比的线性方程
Q0=0.014 5a+0.267 8
5 结论
1) 针对现有变量喷雾系统精准化程度低、农药有效利用率低等问题,设计了基于PWM的电控精量喷雾控制系统,能够根据施药需求独立控制每个喷头的喷药量。
2) 所设计的电控精量喷雾控制系统,以HMI串口屏为上位机,在线设置和实时显示作业参数;以PIC单片机为核心,获取上位机的数据并转换成PWM控制信号,将控制指令发送至电子开关以控制电控喷嘴体通断的频率和占空比,进而独立调节每个电控喷嘴体的流量。
3) 试验结果表明:在系统压力分别为0.3 MPa、0.4 MPa、0.5 MPa,喷头流量与PWM占空比之间均为线性关系,线性拟合度均大于0.95;电控喷嘴体通断时间误差最大值分别是2.5 ms、2.98 ms、2.9 ms,相对误差最大值分别是6.6%、6.6%、6.8%,RMS误差分别为2.37 ms、2.54 ms、2.27 ms,系统最大响应时间分别为0.179 s、0.176 s、0.167 s。各系统压力下,其相对误差和RMS误差均较小,系统响应时间较短。