朝天椒混合物物料特性的测定与仿真分析*
2023-06-05张德俊唐勇张建龙林蜀云张太华徐卫平
张德俊,唐勇,张建龙,林蜀云,张太华,徐卫平
(1. 贵州师范大学机械与电气工程学院,贵阳市,550001; 2. 贵州省山地农业机械研究所,贵阳市,550007)
0 引言
辣椒是贵州现代农业的重要经济支柱产业,同时也是带动农民创业增收的一个重要途径[1]。到2020年,全省发展辣椒种植总面积已达到363 khm2,其中以朝天椒种植为主,辣椒交易额达709亿元。贵州正从“辣椒大省”向“辣椒强省”迈进[2]。针对贵州山地辣椒大面积种植的机械化收获,设计并生产制造了山地履带自走式辣椒收获机,降低了辣椒收获成本,但收获的辣椒含杂率及漏采率较高,辣椒收获及风选问题急待解决。
刘宇等对色素辣椒果柄的拉断力通过振动分离的方法进行了参数的测定,可知色素辣椒果柄与茎秆拉断力为10.3 N。Lee等[3]通过辣椒收获机对辣椒异物分离的研究,可知辣椒的漂浮速度为11.5 ~14.3 m/s、辣椒叶的漂浮速度为3.45~5.42 m/s及辣椒茎秆的漂浮速度为10.9~12.5 m/s。孔令军等[4]对线辣椒混合物物料特性参数进行测定,可知线辣椒果实的悬浮速度为11.18 m/s,椒叶的悬浮速度为2.95 m/s。以上研究都是针对一般辣椒、色素辣椒及线椒,缺少朝天椒混合物相关参数的研究,朝天椒收获及朝天椒风选环节找不到可参考的参数。
基于上述情况,本文采用贵州省遵义市绥阳县山地履带自走式辣椒收获机采摘的朝天椒混合物材料来进行试验,测定朝天椒混合物的物料特性、辣椒果实与果柄的结合力及朝天椒混合物的悬浮速度,以期为辣椒清选装置的优化及整机收获性能的改善提供理论数据支撑。
1 朝天椒含水量及几何尺寸测定
1.1 朝天椒含水量测定
朝天椒含水率[4]
式中:m1——朝天椒干燥前的质量;
m2——朝天椒干燥后的质量。
朝天椒含水率(10个一组)测定结果如表1所示,去掉最小值和最大值,计算可得朝天椒的平均含水率为74.7%。

表1 朝天椒含水率Tab. 1 Water content of Chaotian pepper
1.2 朝天椒长度测定
测量朝天椒果实长度L1,采用简单随机抽样,从辣椒收获机采摘的朝天椒混合物中随机抽取120个朝天椒进行测量,每5 mm代表一个梯度进行分类,测量结果见表2,朝天椒果实平均长度为68.5 mm。
表2 朝天椒果实长度测量数据Tab. 2 Fruit length measurement of Chaotian pepper
1.3 朝天椒直径测定
贵州朝天椒为子弹形,直径从尖端到末端逐渐增大,但锥体幅度变化较小,可看作子弹形,测量辣椒末端直径代表整体直径,因为这个地方的直径,更接近于朝天椒真实尺寸情况。采用简单随机抽样方法,从收获机采摘的朝天椒混合物中随机抽取120个朝天椒,并用卡尺测量,每1 mm代表一个梯度,测量结果见表3,朝天椒平均直径为9.65 mm。

表3 朝天椒直径测量数据Tab. 3 Diameter measurement data of Chaotian pepper
2 椒叶几何尺寸测定
朝天椒的椒叶呈椭圆形,用简单随机抽样法从辣椒收获机采摘的朝天椒混合物中随机抽取120片椒叶测量,每10 mm为一个梯度,测量椒叶长度;每5 mm 为一个梯度,测量椒叶宽度,结果见表4和表5。辣椒叶平均长度L2=103.67 mm,平均宽度L3=45.58 mm。
表4 椒叶长度测量数据Tab. 4 Measurement data of pepper leaf length

表5 椒叶宽度测量数据Tab. 5 Measurement data of pepper leaf width
3 辣椒果实及果柄结合力测定
3.1 结合力有限元仿真分析
本文运用Ansys有限元分析软件的结构静力分析模块分析辣椒果柄分离的力学特性,其原理是将复杂的连续微分方程问题,转化为有限个线性代数方程的问题,以求得近似解[5]。该仿真假设辣椒、果柄及辣椒茎秆的变形均满足式(2)。
{F}=[K]{x}
(2)
式中: {F}——总的载荷列阵;
[K]——模型的刚度矩阵;
{x}——节点的位移列阵。
辣椒果实主要由果柄、果肉及果籽等部分组成,其纵剖面如图1所示。影响辣椒果柄的分离特性主要是果肉、果柄及辣椒茎秆,假设这几个组成部分为线弹性材料。辣椒果实内部简化为一个空腔结构,果柄与辣椒茎秆被近似认为是一个圆柱体,辣椒果实三维模型如图2所示,辣椒与辣椒茎秆几何模型如图3所示。

图1 辣椒纵剖切图

图2 辣椒几何模型

图3 辣椒与茎杆几何模型
将建立好的辣椒果实、果柄及辣椒茎秆模型导入Ansys Workbench中,需要设置模型材料属性,辣椒果实的弹性模量取为6 MPa。通常水果和蔬菜的泊松比在0.2~0.5,参考谢志平等[6]的刺梨泊松比参数,设置辣椒果实的泊松比为0.3。果柄与辣椒茎秆的弹性模量和泊松比参考谢志平及侯俊铭等[6-7]研究,设置辣椒果柄及辣椒茎秆的弹性模量为9.0 MPa,泊松比设置为0.25。辣椒果实、果柄及辣椒茎秆均采用四面体类型的单元,辣椒果实、果柄及辣椒茎秆的划分尺寸分别为2 mm、1 mm和1.5 mm,其模型网格划分如图4所示。

图4 网格划分
在辣椒果实尖端下部施加固定约束;参照微机控制电子万能试验机对一般果实果柄分离试验的加载速率,在果柄一端的平面上施加加载速率4.5 mm/min的位移载荷,以模拟与辣椒果实与果柄的分离试验,其施加载荷和约束的位置如图5(a)所示;在辣椒茎秆上施加固定约束,同样在辣椒果实上施加加载速率4.5 mm/min的位移载荷,以模拟与辣椒果柄与辣椒茎秆的分离试验,其施加载荷和约束的位置如图5(b)所示。
(a) 辣椒果实与果柄施加的载荷与约束

(b) 辣椒果实果柄与茎秆施加的载荷与约束
通过应力云图能够清楚地反映出果柄分离过程中应力的分布规律,并且可以分析出果柄脱落的部位和载荷,对于辣椒果实的自动化采收和果柄分离加工工序具有重大意义。
根据有限元模型仿真的计算结果可获得等效应力云图,由应力云图可知果柄与辣椒果实及果柄与辣椒茎秆的结合区域为分离破坏区域,这也与真实采摘结果位置相吻合。
由图6(a)可知果实与果柄的结合部位为危险破坏截面,该截面等效应力达到最大值为1.936 7 MPa。由图6(b)可知果柄与辣椒茎秆的结合部位为危险破坏截面,危险破坏截面处应力达到最大值为1.664 5 MPa。
(a) 辣椒果实与果柄拉伸分离应力图
辣椒果柄所受应力
(3)
式中:F——轴向载荷,N;
A——辣椒果柄截面积,mm2。
辣椒果柄截面积为5.9 mm2,根据辣椒果柄所受应力及截面积,通过式(3)计算可知:辣椒果实与果柄结合力为11.43 N,果柄与辣椒茎秆结合力为9.82 N。
3.2 结合力拉伸测定试验
采用卧式手摇拉力计仪器来测量结合力,卧式手摇拉力计型号为NK300,最大测量力为30 N,仪器结构如图7所示。

图7 卧式手摇拉力计结构示意图
对辣椒果柄结合力进行拉伸试验时,卧式手摇拉力计仪器应水平放置。首先通过旋钮打开下夹紧装置夹紧辣椒果实;然后同样通过上夹紧装置夹紧辣椒果柄;其次按下回零按钮,使卧式手摇拉力计仪器的刻度表指针归零;最后通过缓慢摇动手柄拉伸辣椒果实与果柄,当机器发出“铛”提示音时,表示辣椒果实与果柄已成功分离,立即停止摇动手柄,记录机器刻度表的数值,数据即为辣椒果柄的结合力大小。通过拉伸试验图(图7)可看出,辣椒果柄的断面在果柄与果实的结合部分,果柄分离断面与仿真结果一致。辣椒果柄与茎秆的分离步骤和辣椒果实与果柄分离步骤相同,分别测量10组辣椒果柄结合力,求平均值,测定数据如表6所示。
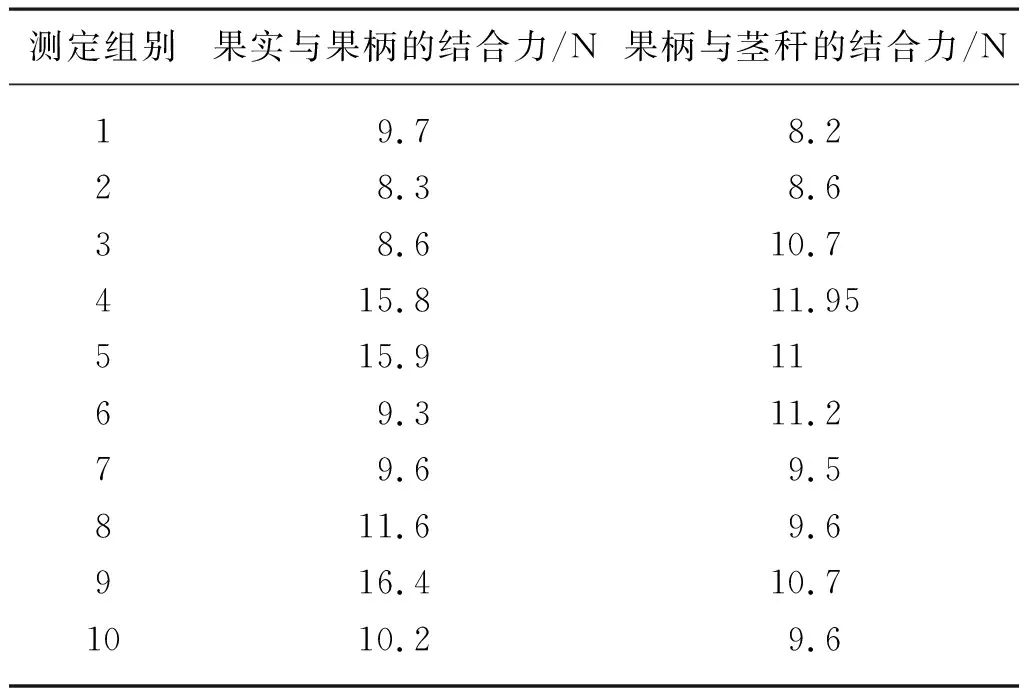
表6 辣椒果实及果柄结合力测量数据表Tab. 6 Data table of pepper fruit and stalk binding measurements
通过手摇拉力计仪器测得辣椒果实与果柄的平均结合力为11.54 N,果柄与辣椒茎秆的平均结合力为10.11 N。通过辣椒果柄结合力的实验法与仿真法对比分析可知:辣椒果实与果柄结合力误差为0.96%;果柄与辣椒茎秆结合力误差为2.95%。
4 悬浮速度的测定
4.1 基于EDEM-Fluent耦合仿真的辣椒混合物悬浮速度测定
选择辣椒、辣椒叶、辣椒茎秆为研究对象进行颗粒建模,由于目前EDEM软件研究粒子模型均全部使用球形结构来描述,所以采用“多球丛聚法”的方式,对3个大小不同的研究粒子加以简化、重叠合并及重新填充来替代实际风选的研究粒子模型[8]。颗粒模型如图8所示,朝天椒由22个不同粒径(最大直径10 mm)的小球形结构合并填充而成,总长度为104 mm;辣椒叶由1 000个直径为1 mm的球体合并填充而成,总体长度为150 mm,总体宽度为46 mm;而辣椒秆则由40个直径为3 mm的球体合并填充而成,总体长度为107 mm。

(a) 朝天椒三维模型

(b) 辣椒叶三维模型

(c) 辣椒茎秆三维模型
通过WDW3100微机控制电子万能试验机(图9)对朝天椒、辣椒叶及辣椒秆进行压破试验和拉伸试验求取泊松比与剪切模量,试验加载速度为6 mm/min,通过天平与量筒法测量密度。

图9 WDW3100型微机控制电子万能试验机结构示意图
泊松比
(4)
式中:εl——横向正应变;
ε——轴向正应变。
剪切模量
(5)
式中:σ——应力。
密度[9]
(6)
式中:M——物料重量;
V2——加物料后体积;
V1——初始体积。
通过斜板试验(滑动法与滚动法)分别测量辣椒、辣椒秆和辣椒叶与钢板之间的摩擦接触参数,通过碰撞试验分别测量辣椒、辣椒秆、辣椒叶及钢板间的恢复系数[10-11]。
将物体放置在摩擦系数测量仪上,通过缓慢调整斜面角度,当物体接近下降时,摩擦角即可测量(斜面和水平面角度),其正切为所需的物体摩擦系数。该装置的组成结构为:工作面、框架、角度调节机构,如图10所示。
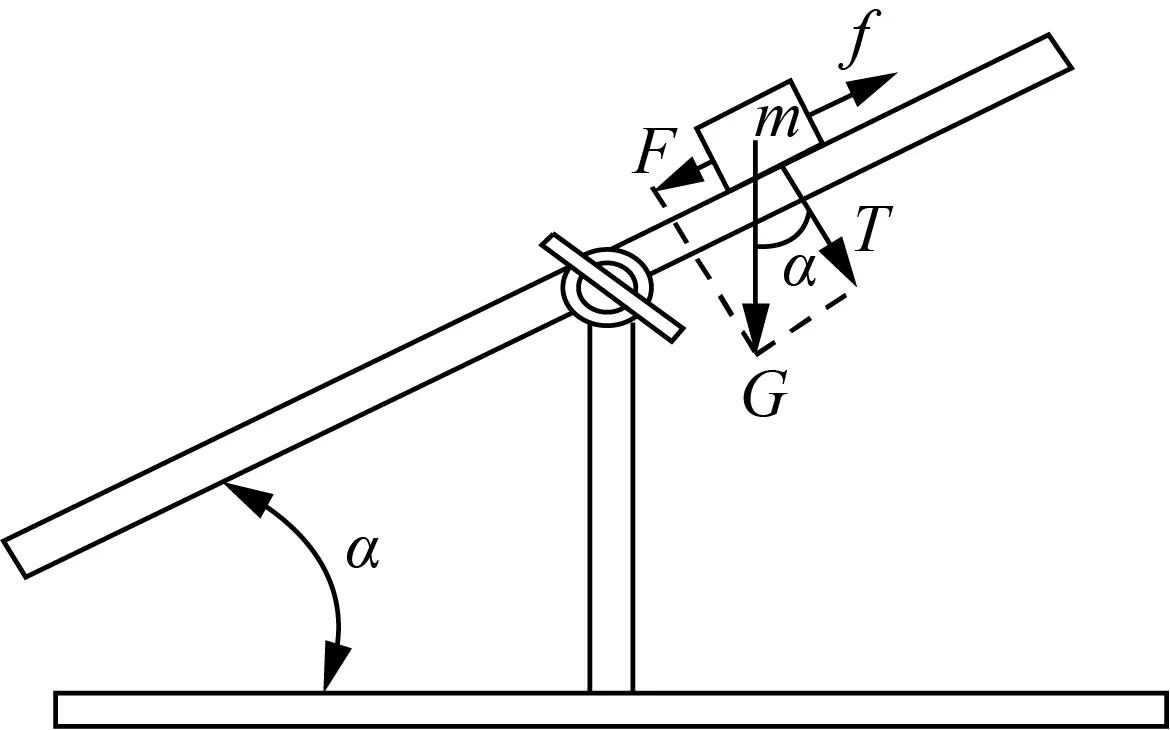
图10 测量物体物理特性装置原理图
测量静摩擦系数常用的方法是斜面滑动法,质量为m的物体在重力G作用下可以分解为2个作用力:一个力F平行于斜面和一个力T垂直于斜面。当斜面倾角α小于滑动临界角时,F小于物体与斜面间的静摩擦力f,物体仍处于相对静止,但随着倾斜倾角α的增大,F越来越大,当α大于物体的滑动临界角时,物体将开始沿着倾斜方向下滑。其中,静摩擦系数μs和斜倾角α的关系[10]如式(7)所示。
(7)
试验时选取SUS304钢板作为试验斜面,朝天椒整体呈子弹形,而椒秆为圆柱形,为了避免单颗辣椒及辣椒秆在斜面上滚动,将4颗辣椒及辣椒秆粘合在一起放在钢制斜板上,将平板一侧与水平实验台始终贴合并保持不移动,同时缓慢匀速地将平板的另一侧抬起,当辣椒及辣椒秆在平板上开始滑动时,使用角度感应器检测平板与实验台之间的角度θ,最后通过实验结果确定静摩擦系数。
斜面滚动法是一种广泛用于测量滑动摩擦系数的方法,物体在钢板上滚动时产生滚动摩擦,物体放在倾角为α的钢板上在一定位置以初始速度为0滚动(颗粒沿斜面的滚动距离为S),然后开始滚动到水平钢板上,滚动摩擦使颗粒在水平钢板上滚动一定距离,最后停下来,用卷尺测量水平钢板上的颗粒滚动距离L,L用作评估值(图11),在测试过程中,颗粒进行纯滚动,因此它们受到的阻力被认为只是滚动摩擦,而忽略滚动过程中静摩擦的影响,由能量守恒定律得[10, 12]。

(a) 滚动开始
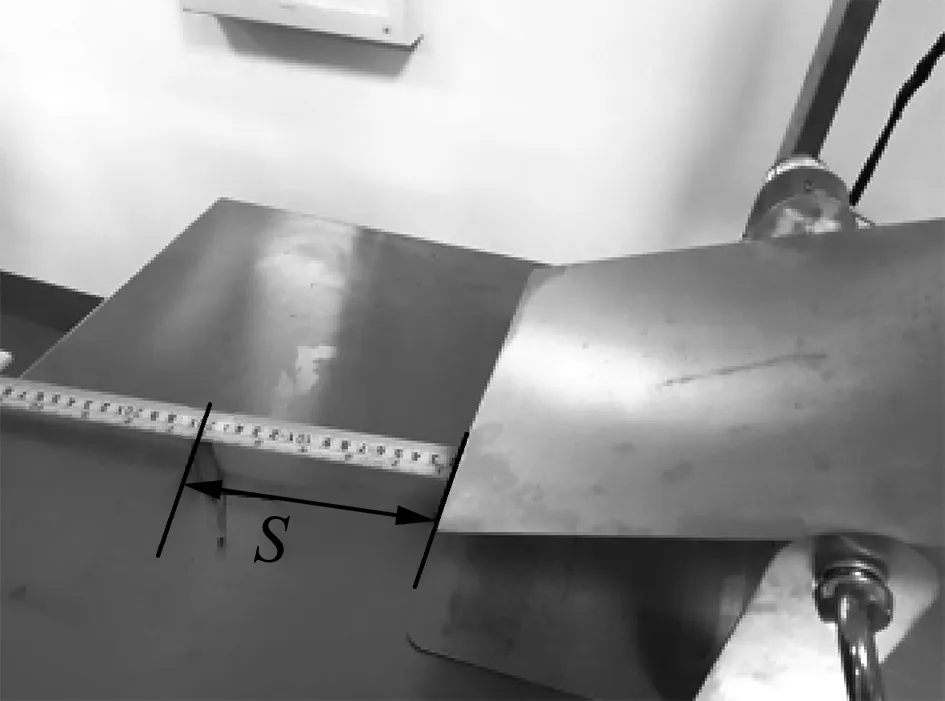
(b) 滚动结束
利用物体颗粒的碰撞弹跳试验对物体颗粒碰撞恢复系数进行测定[13],物体发生粒子碰撞的恢复系数可以表示为物体在碰撞前后接触点的正常瞬时分离速度v2与接触点瞬时接触速度v1的比值,物体颗粒恢复系数的计算公式为[11, 14]
式中:V2——分离速度;
V1——接近速度;
g——重力加速度;
H2——碰撞反弹最大高度;
H1——下落高度。
EDEM软件中物料颗粒的力学特性参数及接触系数如表7和表8所示,风选装置材质选用钢。
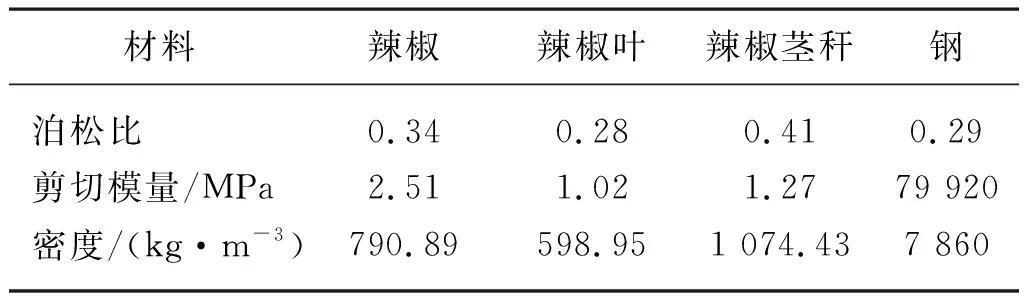
表7 材料的物理参数Tab. 7 Physical parameters of the material
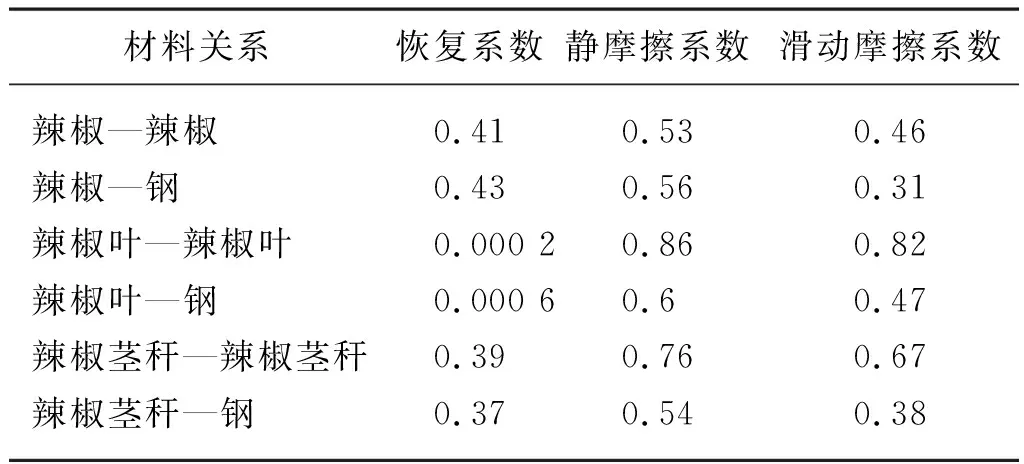
表8 相关颗粒的材料接触系数Tab. 8 Material contact coefficients of relevant particles
在进行悬浮速度耦合仿真时,辣椒、辣椒叶及辣椒茎秆的仿真时间生成步长速率都设定为100个/s,EDEM中仿真的固定时间生成步长设置为29.678 4%,即7×10-6s,仿真时间生成总时长为6 s。Fluent软件中模拟仿真计算模型采用标准的k-ε湍流模型,时间步长设定为EDEM的100倍,即时间步长设置为7×10-4s,总的步数为8 571步。
在风选装置的中间设置颗粒生成工厂,然后在风选装置下部设置进风口,最后在风选装置上部设置出风口。完成了EDEM-Fluent耦合的基本设置后,开始进行耦合仿真,朝天椒悬浮速度的仿真,以风速大小为13 m/s进行耦合仿真;辣椒叶悬浮速度的仿真,以风速大小为3.6 m/s进行耦合仿真;辣椒茎秆悬浮速度的仿真,以风速大小为9 m/s进行耦合仿真,风选结果如图12所示。从图12(a)中可以看出,辣椒颗粒由风选装置中间的颗粒工厂出料生成自由下落,然后在风选装置下部进风口风力作用下,辣椒颗粒悬浮并由风选装置出风口被吹出;从图12(b)中可以看出,辣椒叶颗粒由风选装置中间的颗粒工厂出料生成自由下落,然后在风选装置下部进风口风力作用下,辣椒叶颗粒悬浮并由风选装置出风口被吹出;从图12(c)中可以看出,辣椒茎秆颗粒由风选装置中间的颗粒工厂出料生成自由下落,然后在风选装置下部进风口风力作用下,辣椒茎秆颗粒悬浮并由风选装置出风口被吹出。
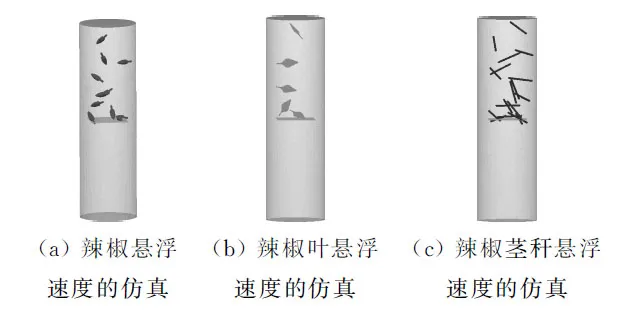
图12 悬浮速度的仿真
通过EDEM与Fluent软件的耦合对辣椒、辣椒叶及辣椒茎秆的仿真分析可知:朝天椒果实在风速为13 m/s可实现悬浮;辣椒叶在风速为3.6 m/s可实现悬浮;辣椒茎秆在风速为9 m/s可实现悬浮。
4.2 悬浮速度测定实验
使用气流将辣椒、椒叶和茎秆分离,主要根据辣椒、椒叶和茎秆的悬浮速度不同,风选的气流超过辣椒叶和茎杆的悬浮率,但小于朝天椒的悬浮率。试验设备采用贵州省山地农业机械研究所实验室的悬浮速度测定装置进行测量。测量装置如图13所示。

图13 悬浮速度测定装置结构示意图
试验时,先开启发动机,然后把辣椒放在试验装置小阻尼网上,调节发电机速度,逐渐增加风扇风速,当大部分辣椒完全漂浮并平衡在小阻尼网格顶部时,此时小阻尼网格上的最大风速可以用风速计测量,该风速就是辣椒悬浮的速度;再把椒叶放在试验装置小阻尼网上,加大风机风力,当大部分椒叶完全浮在小阻尼栅上方并保持平衡时,可用风速计测量小阻尼栅上的最大风力,此风速就是椒叶悬浮的速度;最后再把辣椒茎秆放在试验装置小阻尼网上,增加风力,当大部分辣椒茎秆漂浮在小阻尼格上并完全平衡时,此时小阻尼格内的最大风速可用风速计测出,此风速即为辣椒茎秆的悬浮速度,测量结果见表9。
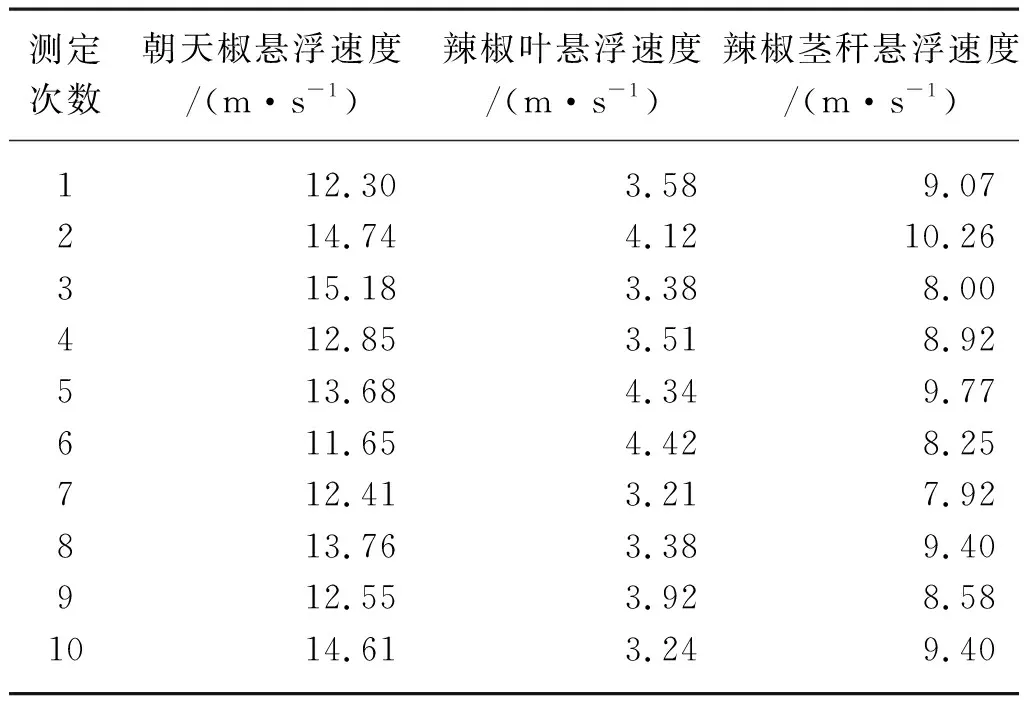
表9 混合物悬浮速度测试数据Tab. 9 Suspension velocity test data of the mixture
经计算,朝天椒果实平均悬浮速度为13.37 m/s,辣椒叶平均悬浮速度为3.71 m/s,辣椒茎秆平均悬浮速度为8.96 m/s。通过辣椒、辣椒叶及辣椒茎秆悬浮速度实验法与仿真法对比分析可知,辣椒悬浮速度误差为2.85%,辣椒叶悬浮速度误差为3.06%,辣椒茎秆悬浮速度误差为0.45%。
5 结论
辣椒果柄的结合力通过Ansys静力学仿真及拉伸试验进行测定;而辣椒混合物悬浮速度采用EDEM与FLUENT耦合风选仿真及悬浮试验来进行测定。试验所测数据与仿真数据对比分析,可得以下结论。
1) 通过Ansys静力学仿真可知,辣椒果实与果柄的结合力为11.43 N,果柄与辣椒茎秆的结合力为9.82 N;而通过拉伸试验,可测得辣椒果实与果柄的结合力为11.54 N,果柄与辣椒茎秆的结合力为10.11 N。经过辣椒果柄结合力的实验法与仿真法对比分析可知,辣椒果实与果柄结合力误差为0.96%,果柄与辣椒茎秆结合力误差为2.95%。
2) 通过EDEM与FLUENT耦合风选仿真可知,朝天椒果实在风速为13 m/s可实现悬浮,辣椒叶在风速为3.6 m/s可实现悬浮,辣椒茎秆在风速为9 m/s可实现悬浮;而通过悬浮试验,可测得朝天椒果实悬浮速度为13.37 m/s,辣椒叶悬浮速度为3.71 m/s,辣椒茎秆悬浮速度为8.96 m/s。通过辣椒、辣椒叶及辣椒茎秆悬浮速度的实验法与仿真法对比分析可知:辣椒悬浮速度误差为2.85%;辣椒叶悬浮速度误差为3.06%;辣椒茎秆悬浮速度误差为0.45%。
3) 以上研究数据可进一步为优化辣椒清选分离装置及改善辣椒收获机收获性能提供数据支撑,对于促进贵州朝天椒产业的发展具有十分重要的意义。
