特定车速下轻型卡车驾驶室异常抖动故障诊断方法
2023-06-02王郡成
王郡成
(1.北汽福田汽车股份有限公司时代事业部,山东 诸城 262233;2.潍坊市经济学校,山东 诸城 262234)
0 引言
轻型卡车在平直沥青路面或平整度较高的水泥路面上以特定车速行驶时,驾驶室可能出现上下方向大幅振动、左右方向倾斜与摆动不规律以及异常抖动等现象,降低驾驶员的主观舒适度,严重可造成交通安全隐患[1]。车辆的抖动分为两种类型:自激式抖动和受迫式抖动。自激式抖动是指车辆在受力或者运动过程中,所引起的多种抖动;受迫式抖动是一个被其他振动源激发的对象所引起的抖动。轻型卡车驾驶室异常抖动的自激振主要有:在工作状态下的引擎振动、变速器与驱动桥的内齿轮毂的碰撞、轮毂的转动不均衡所产生的振动。这种抖动与由道路的不平整引起的车辆的无规则的震动共同组成了异常抖动。其他的车架振动、车体振动和车身振动都属于受迫式抖动。在受迫振动体的抖动频率与其自身的抖动频率相近时,就会发生共振。
已有众多研究者对驾驶室异常抖动故障诊断方法展开了研究。其中应用比较广泛的诊断方法主要有两种,一种是基于贝叶斯网络的车辆驾驶室抖动故障诊断方法[2],该方法利用贝叶斯网络的非线性映射能力,来判断车辆驾驶室有无故障,并对抖动故障实现分类,但其判别速度较慢,导致诊断效果不理想;另一种是基于CAN总线的车辆驾驶室抖动故障诊断方法[3],该方法通过对故障数据进行分析,获取训练样本,并建立诊断模型,将训练样本作为模型的检测与参数优化数据,以此实现故障诊断,该方法虽然诊断效率比常规层式网络有所提升,但对于样本分散且数据量大的问题,此方法不能进行反推,使得诊断准确率较低。
鉴于此,本文针对特定车速下轻型卡车驾驶室异常抖动故障问题提出一种诊断方法,通过数据采集与数据解析,计算引起驾驶室抖动故障的底部事件的概率主要度,进而完成故障诊断任务。并通过分析测试的方式,验证了所提方法的诊断效果。研究表明,所提方法计算得出车辆汽缸故障的概率重要度为0.874,诊断准确性较高;车辆居家室抖动故障得出的准确率最高值为97%。
1 异常抖动故障诊断方法设计
1.1 驾驶室信息数据在线采集
对车辆驾驶室异常抖动故障进行诊断,驾驶室数据采集是本研究内容的基础,本文通过数据采集器实时采集车辆驾驶室在线数据,提取驾驶室关键状态信息,根据传输协议对车辆数据进行重新打包,利用总线远程传输的方式将数据包传送至本地数据库中,并在终端设备上进行显示,之后在终端对数据进行整合,最终传输到远程服务器中[4-5]。对于车辆驾驶室的状态信息数据主要利用可修改的定时帧存储方式,则数据采集器A可表示为:
A={S,Ls,Le,E,C}
(1)
式中,S表示的是多向传感器组;Ls表示的是传感器组可控制效率参量;Le表示的是线束集的调整权值系数;E表示的是系数的反向修正因子;C表示的是采集器接口网关。
在数据采集器中,传感器组中的第i个传感器Si对匀速行驶中的车辆驾驶室的在线数据进行监测与采集,通过控制效率参量Ls将数据与修正因子Ei相比较,根据采集器的传输控制协议将与修正因子一致的数据传输到采集器总线中,并通过调整权值系数对其进行调整,之后在车辆驾驶室标准应用接口间实现传输与存储[6]。
利用数据采集器采集的车辆驾驶室故障信息可采列表如表1所示。
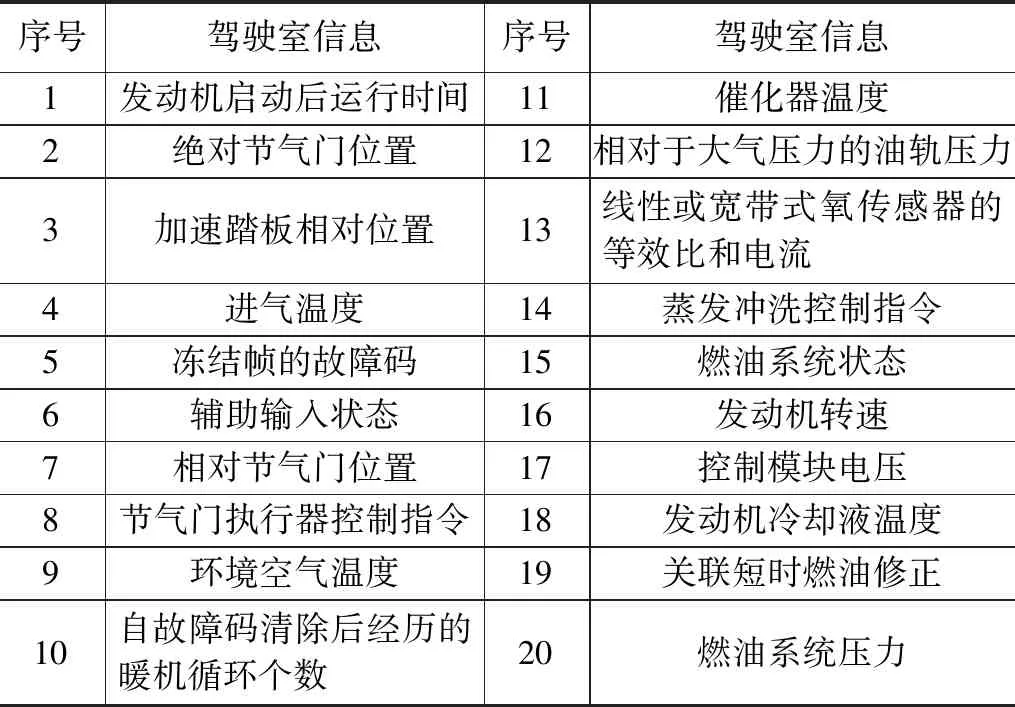
表1 驾驶室故障信息可采列表
实时周期性地采集驾驶室的状态信息,以筛选出驾驶室的实时状态信息,这对于分析驾驶室抖动故障具有实际意义,并且可以被大多数车辆采集[7-8]。根据状态信息的特征对这种类型的数据进行分类。故定义车辆驾驶室数据采集信息集P描述为:
P={Pf,Ps,Po}
(2)
式中,Pf表示的是车辆的车速信息;Ps表示的是车辆驾驶室的振动主频信息;Po表示的是驾驶室振动峰值信息。三者可描述为式(3)所示:
(3)
式中,Pfi表示的是车辆驾驶室振动幅值信息,包含N个数据对象;Psj表示的是驾驶室振动频响信息,包含M个数据对象;Pok表示的是驾驶室振动频率信息,包含Q个数据对象。
根据采集器的采集规律可知,在特定的采集周期内,采集器中存储的数据帧格式一致,但由于采集的速率有所差异,因此,终端接收到的数据应答帧也不同。基于此原理,定义驾驶室状态数据采集机制为随机性数据帧应答机制[9-10]。故驾驶室振动幅值信息Pfi、驾驶室振动频响信息Psj、驾驶室振动频率信息Pok分别可描述为式(4)所示:
(4)
式中,mf1、ms1、mo1均表示的是驾驶室状态信息数据的响应数据定时帧;TC表示的是采集数据器采集周期;TK表示的是将周期划分为K个。则对于车辆驾驶室采集到的信息数据可表示为B=(Pfi,Psj,Pok)。
利用以上方法确定了车辆驾驶室数据采集列表,以及相应车辆数据采集周期[11]。并采用采用问答式总线通讯,以定周期发送车辆驾驶室数据采集信息集中的数据询问数据帧,获取驾驶室数据应答数据帧,以此实现车辆驾驶室状态信息的采集,为后续研究提供数据基础。
1.2 驾驶室信息数据解析
将上述利用数据采集器采集到的驾驶室在线状态数据根据采集事件进行排序,并创建动态数据流文件,将其上传到计算机上,对驾驶室抖动故障数据进行解析,以此找出引起驾驶室异常抖动故障的具体因素[12]。在对数据进行解析之前,为保证故障来源的反推精准度,需要预处理采集到的状态数据,对数据中的重复、损坏数据予以剔除,并将整理后的数据进行标准化处理,整合为统一格式,简化数据解析流程。数据的标准化公式如下所示:
(5)
式中,ct表示的是采集数据的归一化结果;n表示的是数据的计算维度,本研究中的数据维度选为2;r表示的是归一化系数,该系数的取值范围为0.01~0.05[13];B表示的是初始数据。
在正常情况下,驾驶室中测量点的振动频率在车辆运行期间是稳定的。虽然不能保持不变,但其波动幅度相对较小,通常没有0.5 Hz的差异。如果在一段时间内驾驶室测点振动频率多次超过0.5 Hz,且波动频率出现异常,就可以判定驾驶室存在抖动故障。根据以上分析,首先根据读取的数据流计算出驾驶室测点的波动频率,其计算公式如下:
(6)
式中,p表示的是驾驶室测点异常波动频率;t表示的是测点的监测时间;u表示的是在特定车速下驾驶室测点的异常振动频率次数。车辆在运行中,在不同车速下车辆的抖动是无法避免的,但车辆的剧烈抖动会给驾驶者带来不适,甚至引起驶室结构的谐振,进而导致车辆的损伤。轻型卡车按照40 km/h行驶时,会产生很大的抖动,给司机带来较大的不适。这种抖动的出现,使车辆行驶的舒适度和行驶的安全得到极大的降低;甚至还会导致发动机,变速器等的部件过早受损,使整个轻型卡车抖动更加严重。
在实际应用中,驾驶室测点的频率出现波动不是判断驾驶室出现异常抖动故障的直接指标,有些情况下,其他外界因素也会引起驾驶室异常抖动故障[14-15]。因此可设定一个阈值,根据该阈值诊断驾驶室是否存在抖动故障,其用公式表示如下:
C=p≥H
(7)
式中,C表示的是驾驶室抖动故障状态;H表示的是故障诊断阈值。若驾驶室监测点的频率波动值超过设定阈值,则可判定此时驾驶室存在异常抖动故障。
通过以上方法可以明确当前车辆运行状态及驾驶室是否存在抖动故障,便于接下来诊断故障类型,实现故障诊断输出。
1.3 实现驾驶室抖动故障诊断
本文采用故障树分析法,对可能引起驾驶室抖动故障的原因进行分析,建立相应的故障树模型,从整个驾驶室发生故障的底部事件中分析判断故障因素,实现抖动故障类型的输出。
首先需要对整个系统的故障原因逐步进行分析与推导,找出能够引起抖动故障的所有底部事件,接着将这些所有的事件通过相对应的逻辑关系按照特定的符号进行连接,最后画出一种可以显示导致驾驶室抖动故障的各个事件逻辑关系的树状图[16]。然后对树状逻辑图从定性与定量分析,计算出各个底部事件的故障概率及相关的重要度,从而获取故障类型。
故障树作为一种完整性较强的逻辑因果关系图,能够详细了解轻型卡车驾驶室各个环节的运行情况,对各个作业环节的风险因素作出合理分析,在此基础上,进行异常抖动故障诊断,逻辑性与实时性较强,能够改善传统诊断方法的不足,安全防护实际上是驾驶室抖动故障诊断模型的主要功能,在合理的范围内降低风险或者完全避免风险的发生,以此来维护驾驶室的安全[17]。可以采用驾驶室抖动故障诊断模型作为引导,设计整体的感知结构,在故障树的辅助下,形成驾驶室抖动故障诊断模型,如图1所示。各符号代表的含义如表2所示。
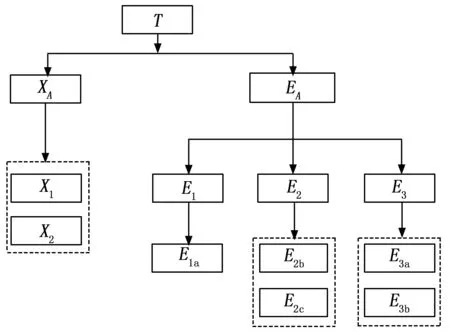
图1 驾驶室抖动故障诊断模型

表2 驾驶室抖动故障诊断故障树符号含义
从结构上来看,所有底部事件构成整个故障树。这些底部事件将不可避免地影响顶部事件,从而导致整个系统发生故障[18]。因此,可通过计算求出每一个底部事件的关键重要度,来判断故障类型。底部事件Xj的结构重要度Ij的算法为:
(8)
式中,mj表示的是事件Xj故障状态,1表示的是事件Xj处于故障状态,0表示的是事件Xj不发生;m表示的是事件Xj的状态数。
在基本事件的结构重要度基础上,进一步计算出底部事件的重要度系数,可直观表征出在所有基本事件中,若剔除某个基本事件,其余基本事件引起顶部事件发生的概率情况[19]。Xj基本事件的概率重要度系数计算公式为:
(9)
式中,P(T)表示的是由于底部事件的影响导致顶部事件发生的分布概率;qj表示的是第j个底部事件被剔除的概率。则基本事件的关键重要度的计算公式为:
(10)
式中,Ie(j)表示的是基本事件的关键重要度系数;P(T)表示的是由于底部事件的影响导致顶部事件发生的分布概率;qj表示的是第j个底部事件被剔除的概率。
经过上述的计算所得,驾驶室抖动故障诊断的故障树模型中任意一个底部事件Xj到顶部事件T的关键重要度均相同[20-21]。通过对驾驶室抖动故障诊断构建的故障树进行定性分析,可以有效地分析出当发生故障时,可以根据故障树模型以及基本事件的关键主要度系数值大小,分析判断出导致驾驶室抖动故障发生的具体因素。
2 故障诊断结果与基本事件匹配
在上述设计的驾驶室抖动故障诊断内容的基础上,通过对故障诊断结果与基本事件的匹配,实现对轻型卡车异常抖动故障诊断方法的设计。在此过程中,基于轻型卡车驾驶室中设备失效层面分析,由于每个底部事件都是最能测量和控制的最小分析单位,也是设备在运行中失效的根本原因,因此可以认为最小割集是引起轻型卡车驾驶室设备失效的最小因素。基于轻型卡车驾驶室设备失效概率方面分析,可以根据各个功能部件的关键性程度,对其进行排序,从而快速地判断出轻型卡车驾驶室设备的失效概率。此过程如下计算公式所示。
(11)
式中,a(x)表示的是轻型卡车驾驶室设备的失效概率;b(x)表示的是顶部事件的失效概率;Ni(x)、Mi(x)均表示的是单元构件的失效概率。针对轻型卡车驾驶室设备在使用过程中发生的抖动故障,可以将故障树的相关信息导入到故障树模型上,从而更直观地判断出每个设备的关键部位信息,并按照顺序进行排序,从而生成失效顺序。对其进行故障的分析,要从主要的仪器开始,一旦发现有问题,要立即进行修理或更换。若没有出现问题,则根据其在故障判断顺序中所占的重要位置,查找出问题根源。由于轻型卡车驾驶室各设备的失效机理各有差别,可以根据下面所列的公式,进行失效概率的匹配,从而迅速识别出故障的种类。
(12)
式中,Scfm表示故障诊断结果与基本事件的匹配;Di表示关键重要度单元。按照上述方式,实现对故障诊断结果与基本事件的匹配,完成特定车速下轻型卡车驾驶室异常抖动故障诊断方法的研究。
3 实验论证
本研究通过实车试验获取并分析驾驶室实时的在线状态信息数据,以验证设计的驾驶室抖动故障诊断方法的合理性。
3.1 实验准备
实验中选取2021年生产的国产轻型卡车作为实车的实验平台,将数据采集器接入车辆的32针标准应用接口,采集器后端连接搭载车辆在线监测的PND设备,实验平台如图2所示。
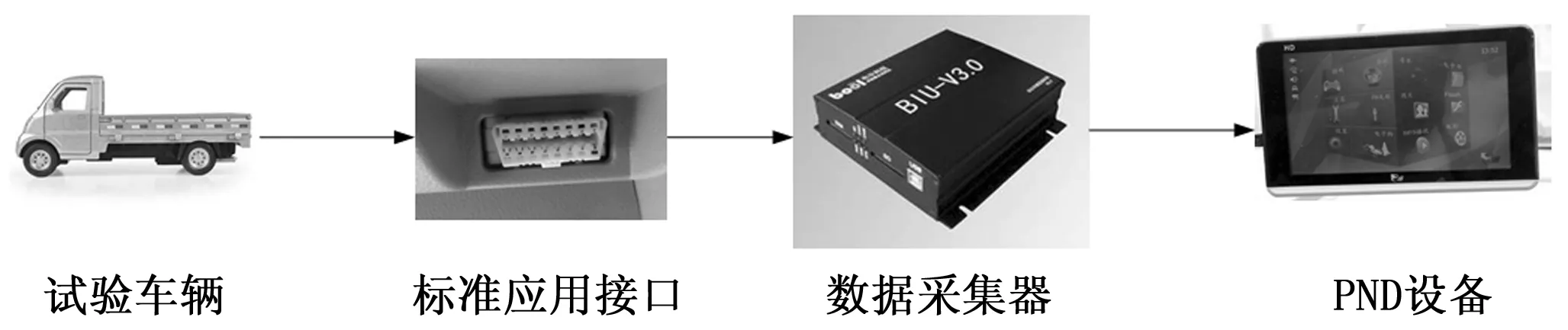
图2 实验平台
实验中其他设备还包括三向加速度传感器2个、单向传感器12个、24通道的振动滤波运算放大器3套、声振测试仪一套。测试路面为B级沥青路面,控制车速为50 km/h,驾驶室测点布置如表3所示。

表3 加速度传感器安装位置分布表
设置单向传感器的采样频率为100 Hz,多向传感器的采样频率为150 Hz,采样间隔均为10s。整个实验过程中,车辆的以50 km/h速度匀速行驶,并且每行驶100 m采集一次20 s的驾驶室关键测试点的振动在线数据。
3.2 实验说明
对驾驶室的测点区域进行标记并安装量测设备,在采集系统中设置采集参数,包括信号源频率和传输信道类型等。由于驾驶室内的测点分布较广,数量较多,因此,为方便后续对采集的在线数据进行识别与在线解析,将10个测点划分为一组,共计50组测点,对每组测点依次测试。同时,在测试过程中,实时观察数据状态,以保证测试数据的有效性。
根据工程实际经验可知,在特定车速下,引起车辆驾驶室抖动故障的激励源可能为发动机、燃油系统、供电系统、变速箱、传动轴、底盘传动、行驶路面等因素。经过对采集到的数据进行解析,发现试验车辆在6.0 Hz处的振动峰值最为明显,存在抖动故障,通过振源分析与预先排查,引起驾驶室导轨处振动的主要原因为后桥输入,与汽缸故障有直接关系。将此结论作为测试设计的抖动故障诊断方法应用性能的评判标准,验证所提方法的有效性。
3.3 抖动故障诊断结果分析
通常在特定车速下,轻型卡车驾驶室内的各项数值与信息是十分庞大的,且变化性较强,可以在控制平台中安装相对适配的数据采集数据源,搭配相应的执行指令与协议,实现各类数据及信息的等效采集。但是需要注意的是,部分轻型卡车驾驶室的作业态势包括但不限于运行状态、安全事件、评估检测等问题的处理,所以对应的感知程序也需要较为灵敏一些,此时可以构建故障树,具体步骤如下。
步骤一:通过所采集的特定车速下轻型卡车驾驶室内的各项数据,计算出等效感知比率,具体如公式(13)所示:
(13)
式中,J(n)表示的是等效感知比率,nm表示的是感知态势差值,α1表示的是异常点距离,λ2表示的是感知频率,gc表示的是风险最大值,cg表示的是风险最小值。将得出的数值设定在车辆驾驶室抖动故障树模型之中,结合故障树理论,设定量化层级设计,对轻型卡车驾驶室作业每一个环节均作出态势的多目标感知,实现故障风险态势判别。
步骤二:在完成对等效感知比率的计算后,接下来,采用自适应处理法,实现对轻型卡车驾驶室异常抖动故障风险态势的感知设计。结合模型的感知情况,设计自适应感知范围,具体如下公式(14)所示:
(14)
式中,U表示的是自适应感知范围,θ表示的是等效覆盖距离,HJK表示的是最优感知常数,BHJ表示的是单向态势变动差。
步骤三:结合得出的感知范围,设定自适应覆盖区域,并实现均匀划定,并计算出标准感知适应度,具体如下公式(15)所示:
(15)
式中,TZ表示感知适应度,d表示覆盖区域,p表示定向感应区域,x表示单向输出感知范围,β表示变动感知向量。依据感知适应度,划定具体的感知区域,结合感知模型,对电力作业位置进行定位,最终实现感知分析,完成故障树的构建。
根据上述流程,得到所构建车辆驾驶室抖动故障树结构,如图3所示。
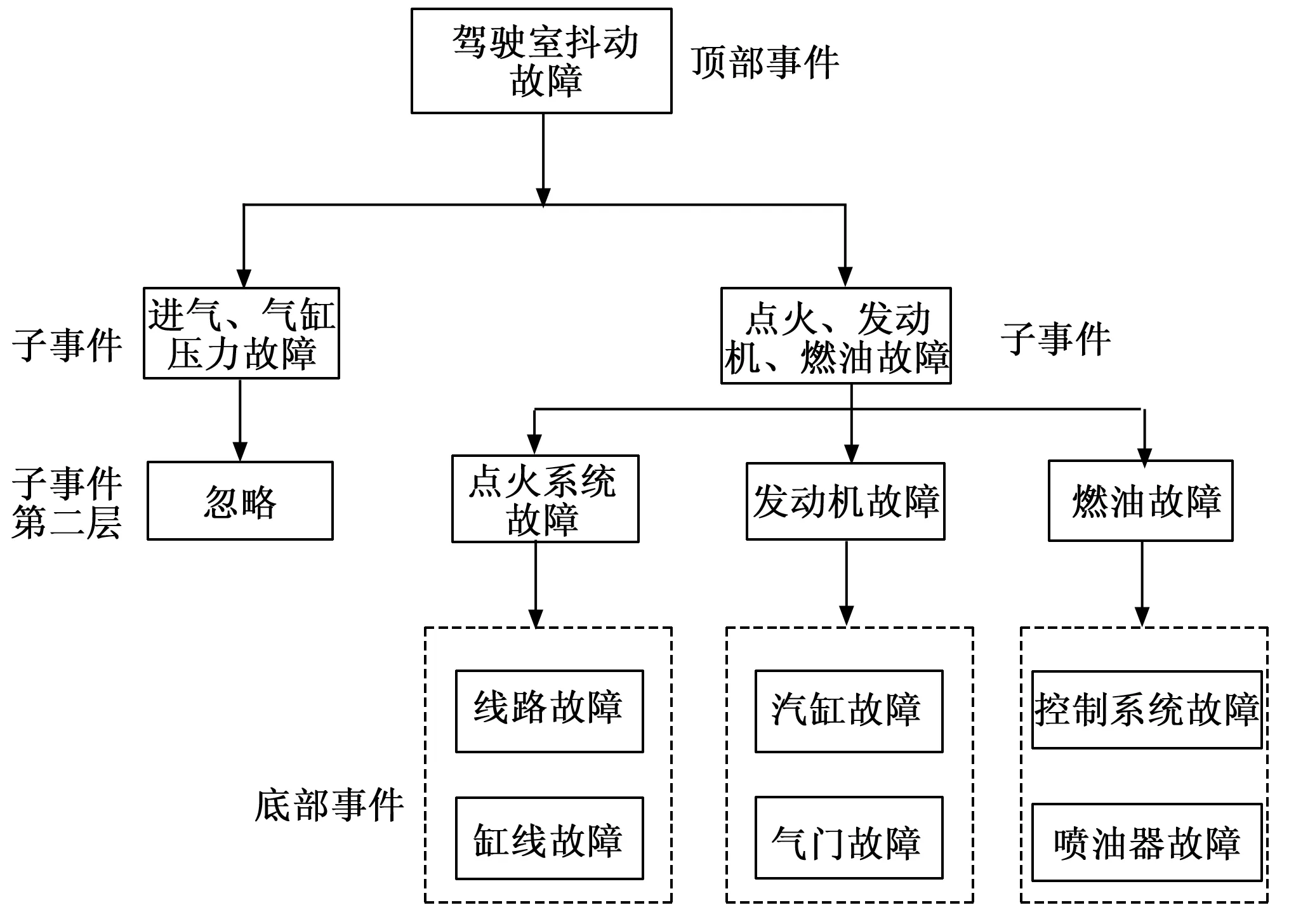
图3 车辆驾驶室抖动故障树
根据图3,在本文设计的车辆驾驶室异常抖动故障树中,驾驶室抖动故障属于故障树的顶部事件,其对应的子事件包括进气、气缸压力故障,各个子事件对应的故障因素存在一定的差异,还包含子事件第二层。另一个子事件为点火、发动机、燃油故障,同样对应子事件第二层为点火系统故障、发动机故障和燃油故障;在故障树子事件中,建立故障底部事件各项风险状态参数之间对应的关系,全方位反映驾驶室各个运行状态的隶属度。通过车辆驾驶室抖动故障树的结构,实时映射各个环节的运行状况。将数据采集器采集到的车辆驾驶室在线状态数据进行故障树的故障诊断,计算底部事件的概率重要度,从而诊断引起驾驶室抖动故障的具体故障点,根据该故障点种类,划分驾驶室抖动不同故障种类,通过建立相应的故障树模型,将底部事件的数据输入到车辆驾驶室抖动故障树中,可以较为直接地确定各个单元关键性,并按次序排列,分析产生故障的次序。在进行故障诊断时,从最重要的方面入手,如果诊断出现故障,应及时进行维修或替换。如果未发生存在故障,可按照故障诊断次序中的重要性排列,定位并找到故障源。在此过程中,考虑到发生不同故障的原因存在差异,因此,可通过故障诊断结果与故障事件的匹配,通过此种方式,快速辨识故障类型。诊断结果如图4所示。

图4 驾驶室抖动故障诊断结果
从图4可以看出,采用本文方法通过采集到的数据进行故障诊断,计算得出车辆汽缸故障的概率重要度为0.874,可知引起驾驶室抖动故障的根本原因为汽缸存在故障,与预先排查结果一致,证明本文方法能够根据采集到的相关数据分析判断出是否发生抖动故障,并通过计算底部事件的概率重要度,从而诊断出驾驶室抖动故障的具体因素,表明所提方法的实际应用性能良好,诊断准确性较高。其原因是所提方法逐步分析与推导整个系统的故障原因,找出能够引起抖动故障的所有底部事件,将这些所有的事件通过相对应的逻辑关系按照特定的符号进行连接,最后画出一种可以显示导致驾驶室抖动故障的各个事件逻辑关系的树状图。对树状逻辑图从定性与定量分析,计算出各个底部事件的故障概率及相关的重要度,从而获取故障类型,一定程度上有利于提高诊断准确性。
3.4 诊断准确率对比试验分析
在上述实验准备基础上,选取6台使用时间不同、行驶速度均为30 km/h、驾驶室抖动故障特征明显的车辆,且引起每台车辆驾驶室抖动故障的原因均不相同。利用本文方法与基于贝叶斯网络的驾驶室抖动故障诊断方法(方法1)、基于CAN总线的驾驶室抖动故障诊断方法(方法2)对以上6台车辆驾驶室抖动故障进行诊断。对每种方法应用于每台车辆进行诊断10次,统计3种方法的诊断准确率,对比结果如图5所示。
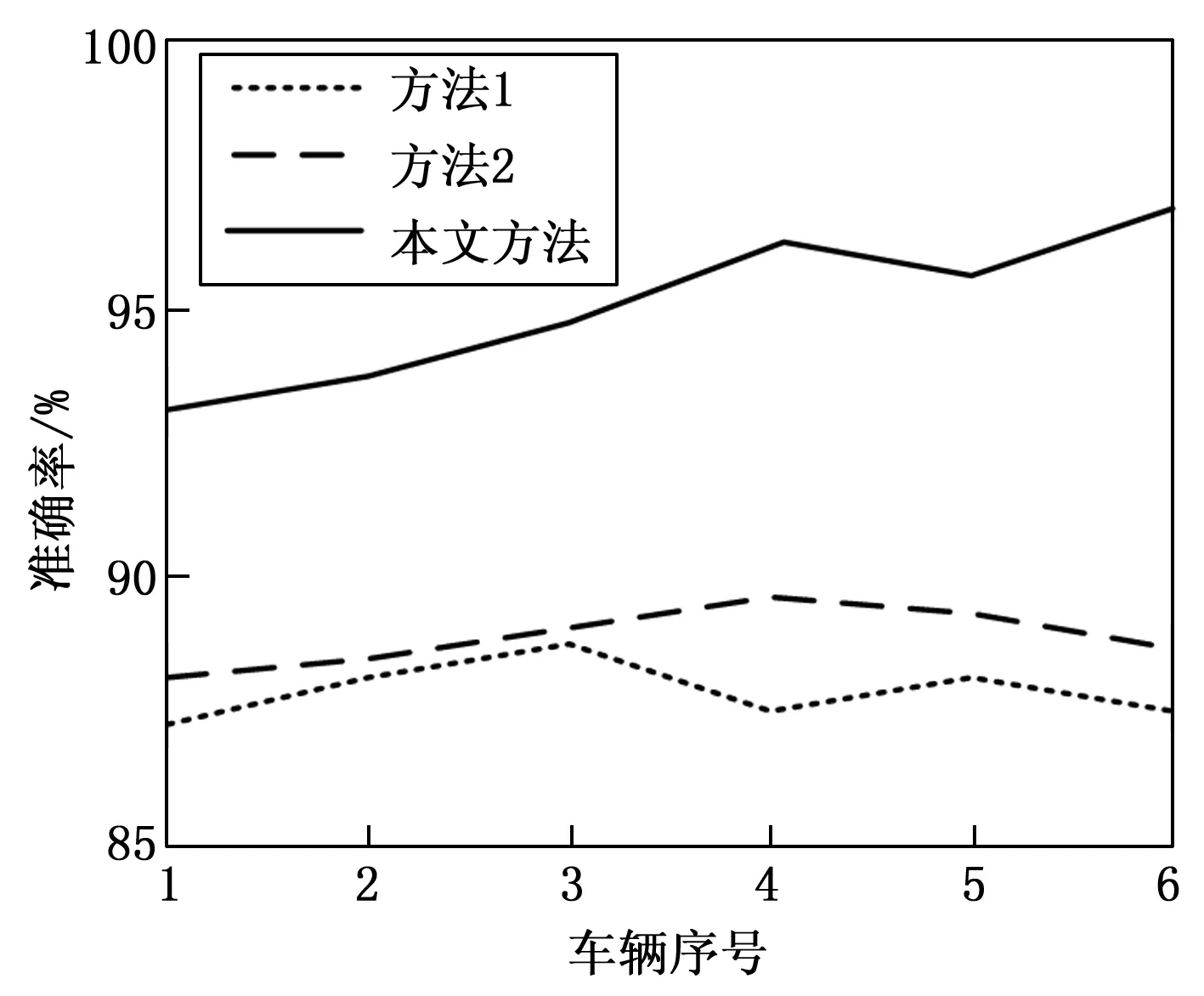
图5 不同方法诊断准确率对比结果
分析图5可知,应用本文方法诊断车辆居家室抖动故障得出的准确率较高,最高的准确率值为97%,而方法1与方法2诊断准确率要远低于本文方法,均未达到90%,方法1的准确率最高值为89%,方法2的准确率最高值为88%。本文发方法准确率较高的原因是:本文方法根据采集的车辆动态数据流可直接分析出抖动故障特征,从而能以较高准确率完成抖动故障诊断任务。实验结果表明,本文在实际应用效果上优于对比方法。
4 结束语
轻型卡车驾驶室异常抖动故障不仅影响乘坐舒适性,还易引发安全事故。本文以特定车速下轻型卡车为研究对象,利用数据采集器以周期性的形式对车辆驾驶室在线状态信息数据进行采集,并对采集的数据进行解析,以明确轻型卡车驾驶室是否存在抖动故障,基于此,采样建立故障树模型实现故障诊断。并经试验对所提方法的有效性进行测试,结果证明,文中方法能够准确地诊断出引起驾驶室抖动故障的具体因素。该方法为轻型卡车驾驶室异常抖动问题的处理,提供了依据与参考。通过研究得到如下结论:
1)采用所提方法进行故障诊断,计算得出车辆汽缸故障的概率重要度为0.874,能够诊断出驾驶室抖动故障的具体因素,表明所提方法的实际应用性能良好,诊断准确性较高。
2)应用所提方法诊断车辆居家室抖动故障得出的准确率较高,最高的准确率值为97%。
虽然特定车速下轻型卡车驾驶室异常抖动故障诊断方法取得一定进展,但是未来的研究可以在如下方面进行深入研究:
1)下一步的工作可以从共振和摩擦力矩不稳定的两个方面深入分析;
2)针对环境温度、工作载荷和相对滑移速率等对摩阻性能的影响,在以后的实验中,可以充分地考虑各种因素的相互耦合效应,从而诊断轻型卡车驾驶室异常抖动故障。
3)以解决实际问题为出发点,在实验分析的前提下,对平衡过载造成的引擎抖动进行对比分析,未来工作可以深入研究。