基于横纵向综合控制的智能汽车路径跟踪
2023-06-02江书真陈一凡
张 平,江书真,陈一凡,张 博,韩 毅
(长安大学 汽车学院,陕西 西安 710064)
0 引 言
智能汽车跟踪路径时,跟踪精度和稳定性是评价跟踪好坏的关键指标。跟踪复杂、曲率多变道路时,若车速始终不变,智能汽车将很有可能达不到跟踪精度和稳定性的要求,严重时可能出现侧翻等危险后果。为了适应道路行驶环境,智能汽车的路径跟踪必须考虑汽车横纵向运动状态耦合的影响。
为更好实现车辆行驶的路径跟踪,许多学者做了相关研究。在单独的横向控制方面,主要方法有预瞄控制[1]、PID控制[2]、模糊控制[3]、最优控制[4]和模型预测控制[5]等。预瞄控制在低速时跟踪性能较好,但未对动力学条件进行约束。PID控制简单实用,但是在不同工况下时需要试凑PID参数,较为耗时。模糊控制依赖于专家及个人经验总结得到的规则库,通常需要大量的试验标定[6]。最优控制要求有较为准确的车辆模型,若模型参数不稳定,则横向控制的稳定性和鲁棒性明显变差[7]。而采用模型预测控制方法,能够较好地贴合实际运动、且能对动力学条件进行约束。在横纵向综合控制方面,文献[8-9]基于模型预测控制方法进行汽车的横纵向综合控制,文献[10-11]结合预瞄理论和不同控制方法实现了汽车的横纵向综合控制,这些方法均取得了较好的路径跟踪效果,但是在研究中对于汽车动力学参数的约束考虑不足,将不利于汽车行驶的稳定性。
综上所述,采用单独横向控制进行路径跟踪时,仅仅通过控制前轮转角难以达到跟踪精度较高的要求,尤其是车速较高时,易使跟踪偏差较大或者侧向加速度超过稳定性的范围。横纵向综合控制时,未根据路径曲率对车速进行合理限制,车速可能会过大;没有合理的加减速控制策略会导致车辆频繁的加速/制动而降低整体效率;动力学参数约束不够将不利于汽车的操纵稳定性。
笔者采用带有车辆动力学约束的模型预测控制器进行横向控制,设计了合理的加减速控制策略,加速时根据车速偏差、偏差变化率为输入设计模糊PID控制器以调节节气门开度,制动时以纵向动力学模型为基础,输出制动压力,从而达到跟踪期望车速的目的;最后,通过纵向车速将横向模型预测控制器、纵向控制器结合,同时引入相关动力学限制条件,最终使智能车辆能准确跟踪期望车速和路径。
1 控制系统总体设计
设计的智能汽车路径跟踪横纵向综合控制如图1。横向控制器由模型预测控制器搭建而成,根据车辆状态、期望路径等信息,在预测模型、滚动优化、反馈校正基础下,对车辆动力学特性进行约束,从而求解输出前轮转角δf;纵向控制器则基于期望路径制定期望车速,借助于合理的加减速控制策略实现跟踪期望车速的目标。笔者设计的横纵向综合控制系统以实际车速为耦合点,在控制车辆运动时将纵向车速同时送入横向和纵向控制器,以实现横纵向的综合控制。这种控制方式既能以较小误差跟踪期望路径和车速,又可以获得较好的稳定性。

图1 横纵向综合控制系统结构Fig. 1 Lateral and longitudinal integrated control system structure
2 横向控制器设计
2.1 车辆横向动力学模型
整车通常是一个很复杂的系统,但是考虑到笔者主要是研究智能车辆的路径跟踪问题,暂时对悬架的影响不予考虑;同时,文中的动力学模型主要是作为路径跟踪系统中的预测模型使用,为了减少算法的计算量,需要对模型有效简化。研究中采用的假设包括:① 智能车辆始终行驶在平坦路面上,不考虑垂向运动;② 车辆整体刚性,忽略悬架的作用;③ 不考虑气动力;④ 轮胎工作在线性区间,且不考虑轮胎横纵向力之间的关系。
用简化后的单轨模型来描述车辆运动,构建只有3个自由度的平面车辆运动,即纵向、横向和横摆运动,如图2。
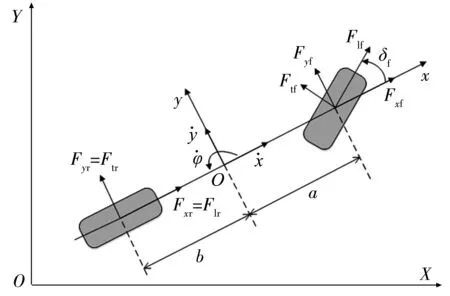
图2 三自由度车辆简化模型Fig. 2 A simplified model for 3-DOF vehicle
基于牛顿定律可知汽车在x方向、y方向和绕z轴方向的动力学方程为:
(1)

根据前文假设,在侧偏角和滑移率较小时,轮胎力可用线性函数近似描述为:
(2)
式中:Clf、Clr分别为前后轮的纵向刚度;Ctf、Ctr分别为前后轮的侧偏刚度;sf、sr分别为前后轮的滑移率。
结合式(1)与式(2),将车辆坐标系转化到大地坐标系,车辆动力学的非线性模型可以简化为:
(3)

2.2 模型预测控制
2.2.1 线性时变模型
智能车辆在高速行驶时,对控制器的算力要求很高,非线性模型往往会增加计算难度,因此采用线性模型预测更简便快速。车辆动力学系统的状态量、控制量u=δf、输出量η(k)=[Ykφk]T之间的关系为:
η(k)=Ck,tξ(k)
(4)
根据式(4),在参考点(ξt,ut)处进行泰勒展开,只保留一阶项,不计高阶项,则有:
(5)

(6)
运用差分近似代替微分,式(6)可以变成如下方程:
ξ(k+1)=(I+TAk,t)ξ(k)+TBk,tu(k)+
ξt(k+1)-(I+TAk,t)ξt(k)-
TBk,tut(k)
(7)
式中:T为采样周期;I为单位矩阵。
预测模型是模型预测控制方法的基础,据此可以估计系统在将来时刻的输出。下面假设为:
(8)
系统状态空间表达式可写成:
(9)
式中:

为简化计算提升效率,做出如下假设。
1)控制时域外,控制量不变,即:
Δu(k+i)=0 (i=Nc,Nc+1,…,Np-1)
(10)
式中:Np为预测时域;Nc为控制时域。
2)预测时域内,Ak,t和Bk,t保持不变,即:
Ak,t=At,t,k=[t,t+Np]
Bk,t=Bt,t,k=[t,t+Np]
(11)
2.2.2 确定约束条件
在文中模型里,除了常规的控制量和控制增量约束外,出于安全考虑,需将车辆质心侧偏角加以限制。质心侧偏角对车辆操纵稳定性影响较大,故需将其限定在一定范围内。研究表明,在附着条件良好和较差的路面上,车辆稳定行驶的质心侧偏角分别不超过±12°和±2°[12],即:
-12°<β<12° (良好路面)
-2°<β<2° (较差路面)
(12)
2.2.3 优化求解
由于车辆动力学模型的复杂性,且要考虑诸多约束限制,控制器往往在较短时间内无法得出最优解。为加快计算速度,在控制器目标函数J中引入松弛因子ε:
(13)
式中:ηref为参考输出;w为对应于松弛因子的权重系数;Q和R为权重矩阵;第1项为与期望路径的偏差值;第2项为控制量增量的连续性。
综合目标函数和约束条件,控制器在每个周期内要解决目标函数和3个约束条件的优化问题:
minJ[ξ(t),u(t),Δu(t),ε]
(14)
式中:yhc为硬约束输出量(系统输出量、质心侧偏角)。在每个控制周期内完成式(14)的优化求解后,从而获得一系列控制增量和松弛因子,将时间序列的首项作为实际控制增量作用于系统,然后进入下一个控制周期,重复这个过程,从而实现智能汽车路径跟踪控制。
3 纵向控制器设计
3.1 上层控制器设计
车辆行驶过程中,经常会加速或者减速,从而保证安全快速地到达目的地。为避免加减速的频繁切换和反应滞后,在控制车辆行驶过程中,应选择合理的加速度过渡区间2Δh值,以参考文献[13]的研究成果,取Δh=0.1 m/s2。
选用CarSim中C级车,在良好路面和不同车速条件下,计算出自由滑行工况下的制动最大加速度amax(此处指绝对值最大,下同)。运用曲线拟合,并结合过渡区间2Δh,可得如图3的加速/制动切换规则图。
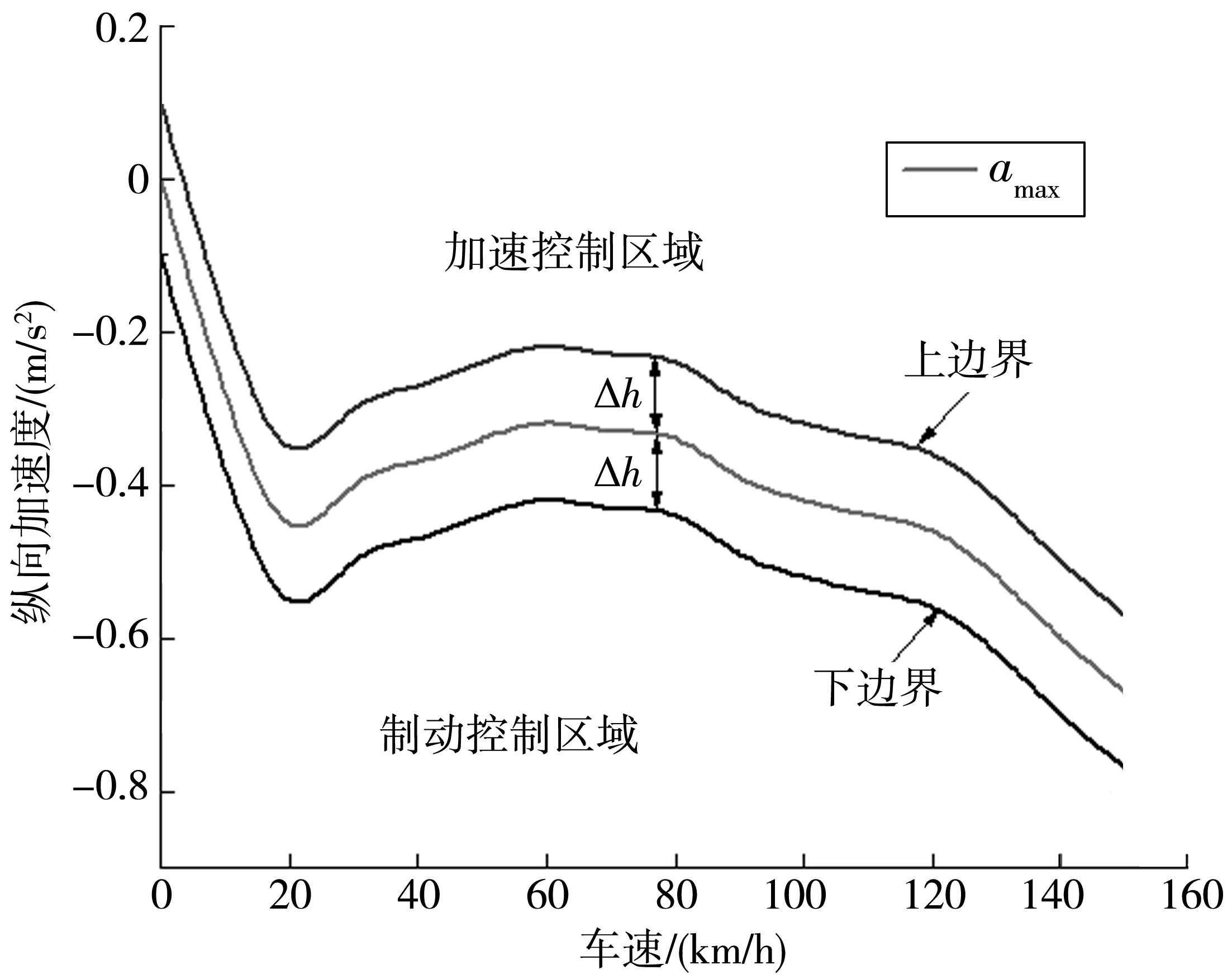
图3 加速/制动切换规则Fig. 3 Accelerating/braking switching rule
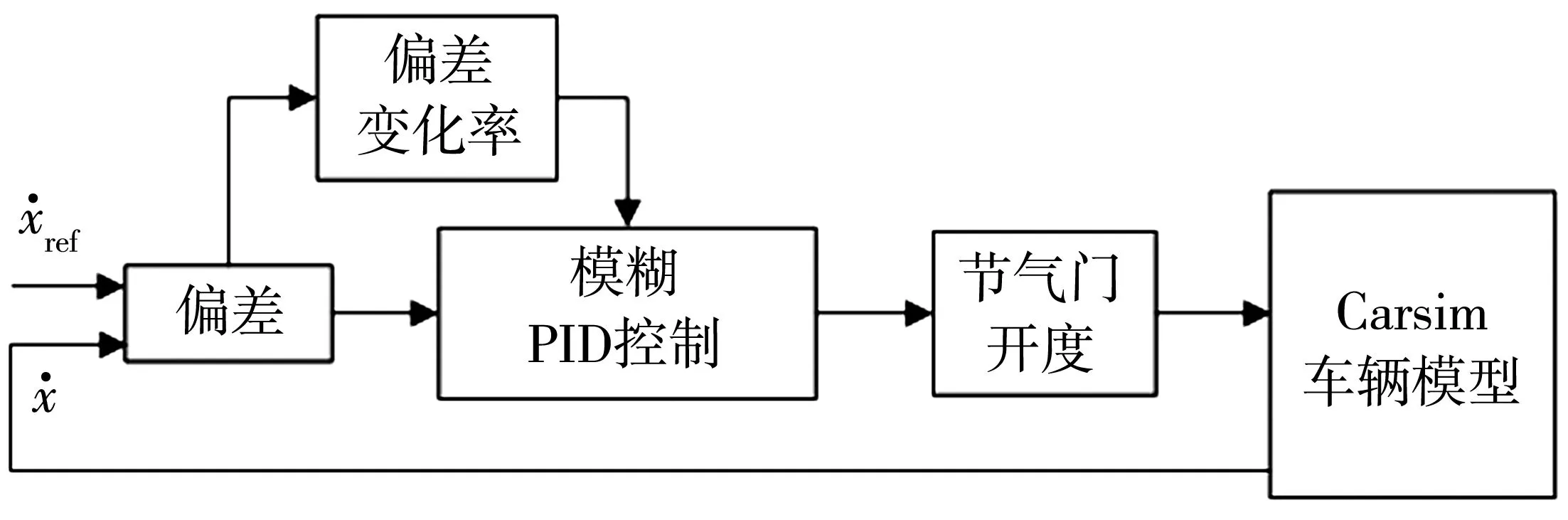
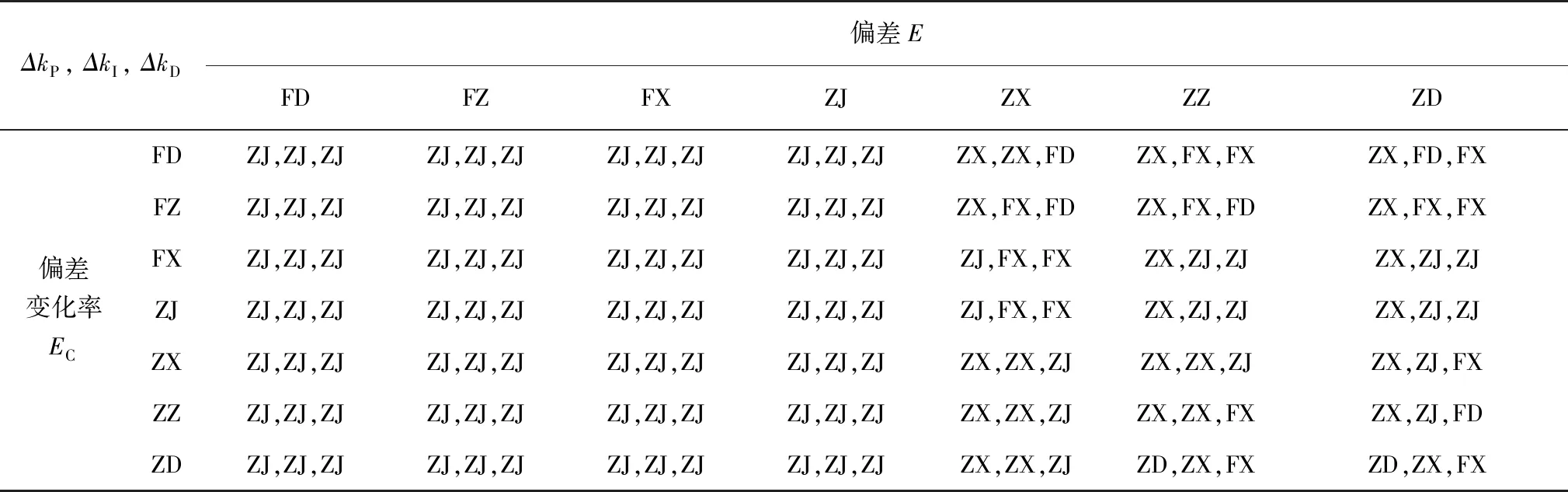
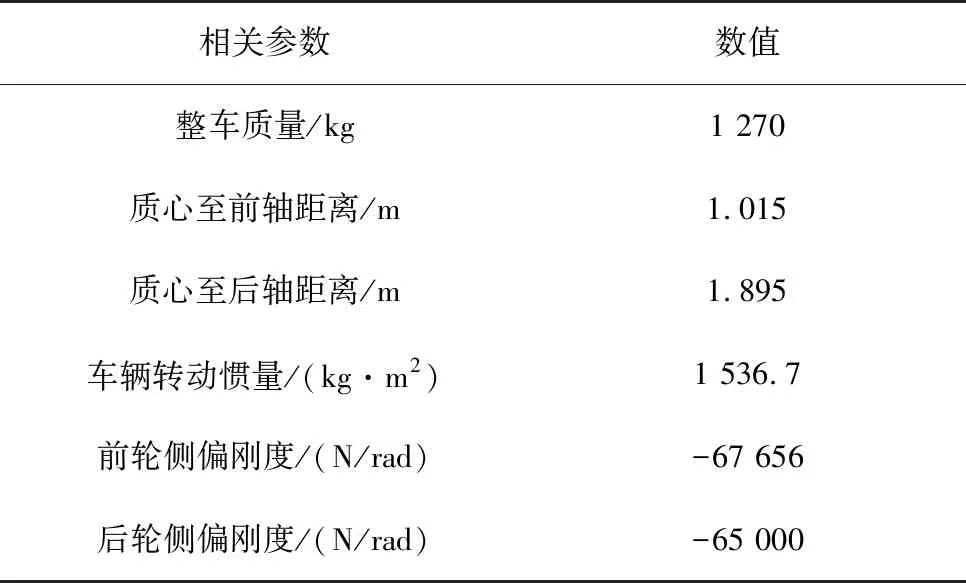
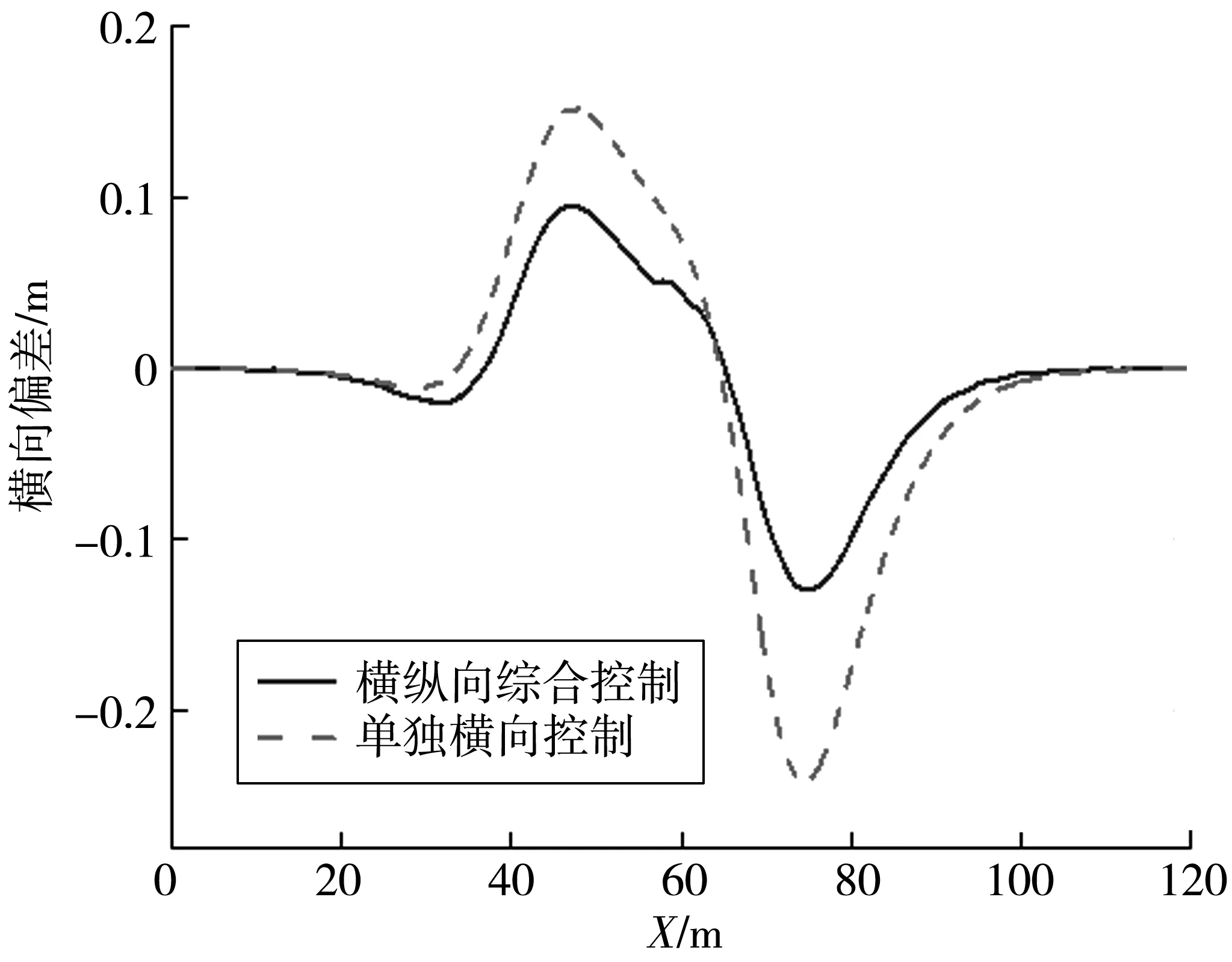
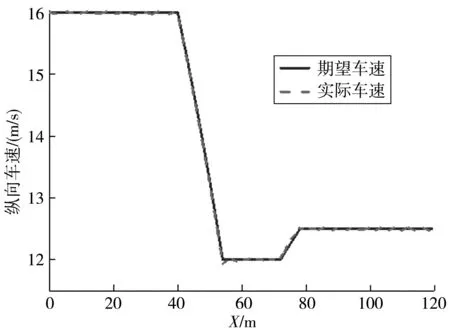
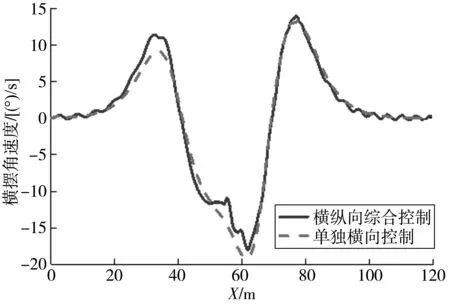
由图3可知,期望加速度aref与不同车速下自由滑行工况下的制动最大加速度amax之间组成的加速/制动切换逻辑为:当aref>amax+Δh时,节气门控制,无制动作用;当aref 图4 上层控制器结构Fig. 4 Structure diagram of upper controller 3.2.1 加速策略设计 汽车是一个高度非线性的复杂系统,包含发动机、变速器及其他传动装置。为实现车辆加速控制策略,制定了能实时调节参数的模糊PID来控制节气门开度,从而使汽车平稳快速地跟踪上期望车速。主要原理是根据期望车速和汽车实际车速之间偏差E、偏差变化率EC来制定模糊控制算法,加速策略结构如图5。 图5 加速策略结构设计Fig. 5 Acceleration strategy structure design 1)输入输出量论域及其隶属度函数。该控制系统为防止单独比例控制难以快速消除系统静态偏差,采用了模糊PID调节ΔkP、ΔkI和ΔkD。模糊控制器输入为实际车速和期望车速偏差E、偏差变化率EC,输出变量分别为ΔkP、ΔkI和ΔkD。输入变量偏差E模糊论域为[-10,10],偏差变化率EC模糊论域为[-5,5],输入模糊语言变量为{FD,FZ,FX,ZJ,ZX,ZZ,ZD}。输出变量ΔkP的模糊论域为[-0.5,0.5],输出变量ΔkI和ΔkD的模糊论域均为[-0.1,0.1],输出模糊语言变量为{FD,FX,ZJ,ZX,ZD},所对应的隶属度函数如图6。 图6 隶属度函数Fig. 6 Membership functions 2)模糊控制规则。模糊规则见表1,其中几个典型的规则如下: 表1 模糊规则 ① 当车速偏差E为正大、偏差变化率EC为正大时,表示期望车速与实际车速的偏差为正值且较大,并有继续增大的趋势,为快速降低系统偏差,ΔkP取正大,ΔkI取正小,为保证系统稳定性,ΔkD取负小。 ② 当车速偏差E为正中、偏差变化率EC为负中时,表示期望车速与实际车速的偏差为正值且中等,但是车速偏差有减小趋势,此时ΔkP应取正小,为保证系统稳定,ΔkI取负小,ΔkD取负大。 ③ 当车速偏差E为正小、偏差变化率EC为负小时,表示期望车速与实际车速几乎相等,此时ΔkP应取正大,为保证系统稳定,ΔkI和ΔkD应取负小。 ④ 当车速偏差E为负大/中/小时、偏差变化率EC为任意值时,表示期望车速小于实际车速,应当切换到制动控制,此时ΔkP、ΔkI和ΔkD均取中等。 3)去模糊化。去模糊化就是将模糊推理得到的模糊值转化为数字值。重心法是常用的去模糊化方法之一,它将隶属度函数曲线与横坐标围成面积的重心作为结果的数字值。 3.2.2 制动策略设计 在水平路面上行驶时,由3.1节可知期望加速度aref,制动时依据汽车纵向动力学进行建模。 当车辆制动减速时,对其纵向受力进行分析,则有: Fb+Ff+Fw=-maref (15) 式中:Fb为制动器制动力;Ff、Fw分别为滚动阻力和空气阻力。 假设引入制动器制动力与制动压力Pb的比例系数Kb,则有: Fb=Kb×Pb (16) 当汽车进行制动,车轮附着率小于地面附着系数时,将式联立可以得到制动压力Pb为: (17) 式中:CD为空气阻力因数;f为滚动阻力因数;A为车辆迎风面积。 汽车弯道行驶时,离心力的计算公式为: (18) 式中:R为汽车行驶的转弯半径。考虑到R=1/ρ(ρ为道路曲率),将期望车速转化为: (19) 为验证笔者所提横纵向综合控制智能车路径跟踪系统的有效性,采用CarSim和MATLAB/Simulink联合仿真进行验证。表2给出车辆模型的相关参数。 表2 整车相关参数 在车辆行驶稳定性评价中,通常用双移线工况来测试[15]。笔者据此设计了相应的行驶路径,具体仿真环境设置为:路面情况良好,车辆初速为16 m/s,从坐标原点开始跟踪。此外,还对比了横纵向综合控制和单独横向控制的效果差异。为保证可对比性,单独横向控制时车辆采用横纵向综合控制时的平均车速13.6 m/s行驶。 双移线曲线(其中Xa为路径纵向位置,Ya为路径横向位置)方程为: (20) 根据式(20)计算得到路径曲率,再根据式(19)确定出弯道处的期望车速,如图7。 图7 期望车速Fig. 7 Expected speed 智能汽车在跟踪如图7的期望速度下,双移线工况行驶的仿真结果如图8~图9。横纵向综合控制的跟踪横向偏差为-0.13 ~ 0.09 m左右,方向偏差为-3.5°~2.6°;单独横向控制的跟踪横向偏差为-0.24 ~ 0.15 m左右,方向偏差为-3.6°~2.8°。显然,横纵向综合控制器在跟踪精度方面效果较好。 图8 跟踪横向偏差对比Fig. 8 Tracking lateral deviation comparison 图9 跟踪方向偏差对比Fig. 9 Comparison of tracking direction deviation 图10显示出综合控制下的速度跟踪效果很好。图11~图12给出了双移线工况行驶时车辆稳定性参数的对比。横纵向综合控制的横摆角速度为 -18~14 (°)/s,侧向加速度为-0.39 ~ 0.32g;单独横向控制的横摆角速度为-19~13 (°)/s,侧向加速度为-0.46~ 0.33g。因此,横纵向综合控制在行驶稳定性方面优于单独横向控制。 图10 车速跟踪Fig. 10 Vehicle speed tracking 图11 横摆角速度对比Fig. 11 Comparison of yaw angular velocity 图12 侧向加速度对比Fig. 12 Comparison of lateral acceleration 为实现智能汽车稳定、准确地跟踪期望路径,笔者在前人研究成果基础上,以车辆纵向车速为纽带,提出车辆横纵向综合控制方法,并应用于双移线工况仿真计算。主要研究结论如下: 1) 横向控制采用带有车辆动力学约束的模型预测控制器;纵向控制方面,通过制定加速/制动切换规则,使车辆合理选择加速或制动模式,加速时根据车速偏差、偏差变化率设计模糊PID控制器以调节节气门开度;制动时,以纵向动力学为基础控制制动压力,从而达到跟踪期望车速的目的;最后,通过纵向车速将横向的模型预测控制器和纵向的加速或制动控制器相结合,形成横纵向综合控制器。 2) 建立CarSim和MATLAB/Simulink联合仿真模型,在双移线工况下验证横纵向综合控制方法的正确性和有效性。结果表明:横纵向综合控制器能在一定程度上减小跟踪横向偏差、方向偏差,行驶过程中主要性能指标波动较小。因此,所提出的横纵向综合控制方法既能实现纵向速度的追随,又能增加路径跟踪的准确性和车辆行驶的稳定性。
3.2 下层控制器设计

3.3 期望车速生成

4 路径跟踪仿真及结果分析
4.1 整车参数及道路模型


4.2 仿真分析


5 结 论