基于北斗导航技术的配电线路智能巡检系统
2023-06-02魏友金陈世群李逸源杨运楠
魏友金 陈世群 李逸源 杨运楠
关键词:北斗导航技术;坐标转换;导航数据;巡检系统;配电线路
1引言
巡检是每个电力企业市场运营中不可忽略的一个主要工作环节,由于配电线路较长,且配电线路在电网中的分布较为广泛[1]。为最大限度地减少配电线路事故,保证配电管线和电力设备的安全运行,巡检人员需要做好对配电线路的安全巡视。根据相关工作的实际情况,对电力管线和输电设备的运行情况进行检查与记录,以保证电力企业在市场内的稳定、规范运营。但在电力企业相关工作的研究中发现,此人工巡视模式在实际中的应用效果十分不理想[2]。由于配电线路管线太长、巡检环境不佳,导致巡检人员难以集中注意力检查管线、设备运行状况,在工作中极易出现漏检、误检等问题。同时,由于巡检技术人员无法及时获得配电线路维修资料,导致巡检中的故障与异常无法得到有效排除。根据相关统计数据可知,造成配电线路故障、损坏的主要原因是日常巡查工作疏忽。随着配电线路越来越复杂、覆盖范围越来越广,常规的配电线路巡检方法已不能满足电力公司的现代化发展要求。为了保证配电线路的安全,必须尽快建立完善、科学的监测和维护体系,因此,本文引进北斗导航技术,设计了一种针对配电线路的全新智能巡检系统,旨在通过此设计,加强配电线路的管理,以保障电力设备设施的安全运行。
2系统架构
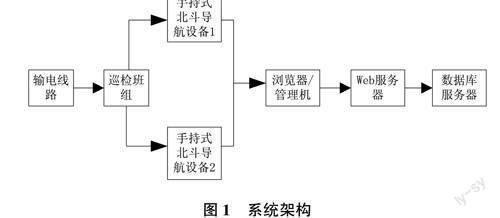
为充分发挥智能巡检系统的价值,在开展相关研究前,参照IMS系统架构,设计智能巡检系统架构,并根据配电线路管理系统架构。该系统主要由前端设备与后台管理2个模块构成,其中后台管理以浏览器/服务器为支撑[3]。系统架构如图1所示。
在智能巡检的过程中,技术人员需要携带手持式北斗导航设备巡视线路,并将故障信息录入管理机。返回后,移动设备通过USB和串口与管理员(用户浏览终端)进行通信,而用户浏览终端则利用IP协议与网络服务器进行数据交互,由网络服务器和数据库服务器进行数据传输,完成移动设备与后台管理之间的数据交互和查询。后台管理也可与已有的MIS等电力信息管理终端进行联网,通过局域网或远程通信的方式实现信息交流。
3北斗导航定位终端设计
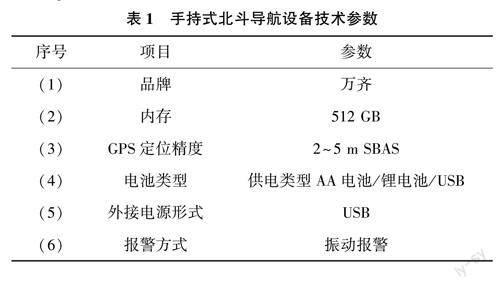
为实现对配电线路的智能巡检,设计系统软件功能前,选型手持式北斗导航设备[4]。相关内容如表1所列。
将手持式北斗导航设备集成在定位终端,在此过程中应明确终端设备的主要功能为对当前位置信息的获取与反馈。根据设计需求,终端由定位设备、芯片、功能按键、蓝牙、指示灯、电源等构成。终端以STM32F103ZET6芯片为核心,集成为意法半导体公司研制的Cortex-M3核心控制器,此控制器具有高性能、功耗低,以及具备112路增强通用输入、输出( GPIO),能够在-40℃~85℃范围内与外部设备进行数据传送的优势。本次开发的系统主要解析的指令包括BDGGA和BDRMC,在解析过程中,需要先分析BDRMC中的定位状态代码是否正确,如果有效,即可得到目前的经纬度、定位精度、平移速度、高度等必要的信息。最后,利用Transmission 4.0将定位信息传输到移动端。
4建立导航数据模型
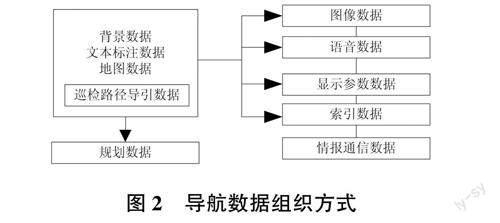
导航电子地图也属于GIS技术研究范畴,为实现对配电线路的智能巡检,完成上述设计后,在导航电子地图中提取导航数据,建立导航数据模型。在此过程中应明确导航数据有物理格式和交换格式2种格式。利用KIWI格式,对提取的导航数据采用纵向分层、横向分段的方式处理。在数据的垂直方向上,按照层次结构组织数据。此时,导航数据的逻辑结构和物理存储器是紧密相连的,通过此种方式,可以在各个层次上快速对数据进行参考。在数据的水平方向上,采用分段分割的方法,将大量数据分解为单独的数据,以实现数据块与数据块的连接。其中,数据组织方式如图2所示。
对多种形式的导航数据进行规范化存储,集成具有相同特征的导航数据,以实现对导航数据模型的构建。
5基于北斗导航技术的巡检线路坐标转换
在上述设计内容的基础上,引进北斗导航技术,对巡检线路坐标转换展开设计。在此过程中,应明确通过手持式巡检终端,可以得到球心坐标系统中的经纬坐标,但此部分数据由于不能直接利用经纬度坐标进行巡检线路中异常点的定位[5],因此,在电力工程中,需要将球面的经纬坐标投影到墨卡托坐标上,进而更加直接地定位线路异常点。在此过程中,参照等角条件,生成巡检线路平面坐标,计算式为:式中,x表示巡检线路平面投影后的横向坐标:R表示巡检范围半径;B表示坐标维度值;y表示巡检线路平面投影后的纵向坐标;L表示坐标经度值。按照上述方式,实现基于北斗導航技术的巡检线路坐标转换。
6巡检维护终端功能规划
完成上述设计后,对智能巡检系统进行配电线路维护终端功能的规划。在此过程中,需要先设计系统的配置功能,即增设系统配置界面,用户可以根据其自身需求,自主选择增加、删除、修改电力对象信息,包括线路节点等。同时,配置系统实时监控功能,北斗卫星具有快速定位的特点,能够实现对移动目标的实时定位与反馈。反馈过程中,监测中心可以建立与手机用户的双向通信,也可以进行广播消息的发布,移动对象可以通过终端向监测中心反馈报告信息。
为进一步优化巡检系统的功能,并提供用户对巡检线路地图的视图功能,包括通过各种技术手段与方式对图像进行缩放处理、漫游、全幅显示与鹰眼处理等。同时,提供用户端多种角度的观测视角,以便对观测区域内负载终端地理位置进行管理。通过上述方式,实现对巡检维护终端功能的规划与部署。
7对比实验
完成上述设计后,为实现对巡检系统在实际应用中效果的测试,选用RMSDU173型号高存储便携式计算机,搭建对比实验环境。环境参数如表2所列。
完成上述配置后,将本文系统集成在测试环境中。使用设计的系统进行配电线路的智能巡检。在巡检过程中,需要先建立导航数据与巡检设施数据模型,在此基础上,引进北斗导航技术,并根据巡检作业环境,进行巡检线路坐标的转换,通过对巡检维护终端功能的规划,完成对巡检系统的设计与开发。
在此基础上,引进基于IED和SCD的巡检系统与基于图像识别技术的巡检系统,将其作为对照组系统1与对照组系统2,使用本文系统与对照组系统对配电线路进行智能巡检。统计系统在巡检过程中对线路异常点的定位精度,在统计过程中,由智能巡检系统进行配电线路异常点的定位,利用通信传输链路反馈巡检定位结果后,安排巡检人员在现场进行异常点的人工定位,计算人工巡检定位结果与智能巡检系统定位结果的偏差,统计不同定位偏差的信息条数,将其作为对比实验的最终结果,统计结果如表3所列。
从表3所列的实验结果可以看出,3种智能巡检系统中,只有本文系统在巡检过程中可以实现无>10m的定位偏差,即所有的巡检定位偏差均<5m,而对照组系统1与对照组系统2的巡检定位偏差较大。在此基础上,对表3数据进行分析可以看出,对照组系统2的定位数据缺失171条,说明系统在巡检过程中存在反馈数据丢失的问题。因此,在完成上述实验后,综合实验结果,得到如下结论:相较于传统系统,本文开发的基于北斗导航技术的系统在实际应用中的效果良好,该系统可以有效控制配电线路智能巡检定位结果偏差。
8结束语
本文通过建立导航数据模型、基于北斗导航技术的巡检线路坐标转换、巡检维护终端功能规划,完成了配电线路智能巡检系统的设计。设计的系统在通过测试后证明了该系统可以有效控制配电线路智能巡检定位结果偏差,从而提高线路智能巡检精度。
