数字化转型时代下电动汽车自动驾驶技术发展研究
2023-05-30王景景田梦常凯迪
王景景 田梦 常凯迪


摘 要:在数字化转型时代下,汽车行业正在向网联化和智能化方向发展,自动驾驶技术的研发成为目前电动汽车企业关注的热点问题之一。本文首先介绍了与自动驾驶相关的技术,然后选取部分电动汽车制造企业,对其自动驾驶的技术路线和能够实现的功能进行研究,最后根据发展现状对自动驾驶技术的发展趋势进行预判。
关键词:数字化转型 网联化 智能化 自动驾驶
1 引言
随着国家政策引导和汽车强国的需要,以5G、物联网、人工智能为代表的数字技术开始对传统制造业的产品定义、产品规划产生影响[1]。其中,汽车行业正由传统硬件制造向以新四化(汽车电动化、智能互联、汽车共享以及自动驾驶)为特征的未来移动出行转变[2],尤其是汽车智能化和网联化的快速发展,推动汽车行业全价值链的数字化转型,誕生出“软件定义汽车”的全新产品理念,智能网联化的自动驾驶电动汽车成为未来汽车工业的发展方向[3]。
2 自动驾驶相关技术研究
自动驾驶技术是指不需要人为操作即能感测其环境及导航,实现车辆自动驾驶[4]。与自动驾驶相关的技术主要有车辆定位、图像识别、信息共享和深度学习等。
2.1 车辆定位
车辆定位是实现环境感知、路径规划与控制等后续功能的基础。汽车在驾驶过程中,通过激光导航、视觉导航等能识别到车辆所处的地理位置,并主动向驾驶系统发送道路信息,以帮助中央导航做出正确的驾驶选择[5]。目前汽车定位采用的传感器主要有激光雷达、毫米波雷达和摄像头等[6]。
2.2 图像识别
借助于人工智能和大数据,自动驾驶车辆在行驶过程中会通过视觉传感器将车辆周边环境的图像数据进行持续的采集,然后反馈给自动驾驶系统,自动驾驶系统对接收到的图像进行多层次的信息加工,且随着类似图像数据的多次采集和处理,系统将逐渐熟悉图像特征,当有相似的图像出现后,系统将准确的识别出图像中的信息[7]。
2.3 信息共享
由于人工智能的应用,不同汽车之间可以实现对实时路况和车辆位置信息的共享。在专用通道中,汽车能够将自身位置、车速等信息与其他汽车共享,使其他汽车的自动驾驶系统实时接收到信息并及时调整车辆的行驶状态,保证车辆行驶的安全性[8]。另外,车辆的自动驾驶系统还能监控共享信息的时效性,自动删除无效信息,从而保证自动驾驶汽车获得最新的共享信息。
2.4 深度识别
深度识别不仅可以及时获取环境信息并进行精准分析处理,而且能够在计算机的帮助下获得更成熟的感知和分析能力。通过将人工智能技术和云服务相结合,汽车自动驾驶系统迅速获得实时数据,通过复杂的算法将结果直接发送到驾驶决策系统,实现真正的智能化驾驶[9]。另外,深度识别能够大幅度提升汽车自动化驾驶的水平和质量[10],如通过监控和分析驾驶员的驾驶偏好,将信息反馈给中央控制系统,可以帮助车辆实现自动调节车内温度和座椅位置等功能。
3 代表企业自动驾驶技术发展
3.1 特斯拉
目前特斯拉自动驾驶技术采用的是全视觉路线,其利用8个摄像头的图像数据进行机器学习,取消了激光雷达,靠视觉感知路线、障碍物等,模拟人脑驾驶时的反馈逻辑;车辆图像数据采集完成后,卷积神经网络将对数据进行分层并行处理,且数据量越大,其处理效果越好,识别精度越高;然后神经网络系统根据算法进行学习,进而产生自主判断能力,自行发出行进或避让的指令开启自动驾驶,见图1。
特斯拉的FSD功能,包括自动辅助导航驾驶、自动辅助变道、自动泊车、智能召唤、自动识别信号灯及标识,同时还具有城市街道自动辅助驾驶功能,但目前该功能仅在美国部分地区搭载。
3.2 智己
智己的自动驾驶技术以视觉方案为主,同时搭载高精摄像头、毫米波雷达、超声波传感器和高精定位单元、V2X车路协同等高性能感知硬件,具有成本低、可持续依托数据进行迭代的优点;感知系统完成图像数据采集后,将由Xavier计算平台进行图像数据的处理与计算,见图2。
智己自动驾驶系统主要可以实现车辆召唤、高速领航、城市领航和自动泊车等功能,另外,通过判定路况和辅助驾驶能力,可对驾驶员驾驶能力进行分级,给予驾驶员相应的反馈,提高驾驶员的信任程度。
3.3 小鹏
小鹏的自动驾驶辅助技术是以视觉和雷达波的融合感知路线为主,感知系统包括高清摄像头、超声波传感器、激光雷达和毫米波雷达以及高精定位单元,能够实现对环境进行视觉和雷达的双重融合感知;采集完成的图像数据,将在NVIDIA Xavier超级计算平台上进行计算,形成数据和算法的全闭环,见图3。
小鹏的自动驾驶辅助系统可实现ACC/LCC/NGP工况下,加塞车辆更早识别与应对,提高拥堵路况下的驾驶舒适性;另外可实现自动泊车辅助、停车场超级记忆泊车等智能泊车功能以及NGP高速自动导航辅助驾驶和NGP城市自动导航辅助驾驶功能,全面提升对行人、静态障碍物和小物体的检测能力,实现最高厘米级测距精度。
3.4 蔚来
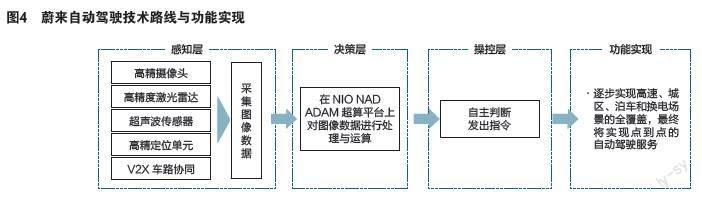
蔚来NAD自动驾驶技术基于视觉和雷达波的融合感知系统,感知系统包括高清摄像头、高精度激光雷达、超声波传感器、高精定位单元和V2X车路协同等高性能感知硬件;图像数据在NIO NAD ADAM超算平台上进行运算,该运算平台能够实现处理复杂交通场景时更准确、迅速,同时可针对每个用户的用车环境进行个性化的训练,以确保每个用户自动驾驶体验更好,见图4。
在NAD自动驾驶技术之前的NIO Pilot驾驶技术可实现全自动泊车、自动进出匝道和车辆近距离召唤,NAD自动驾驶技术的进一步发展,可逐步实现高速、城区、泊车和换电场景的全覆盖,最终将实现点到点的自动驾驶服务。
4 各企业自动驾驶发展现状总结
目前各企业的主要发力点是L2基础功能和L2+进阶功能,通过进一步的硬件利用和算法优化,实现更多维度的功能发展。相对领先的企业基本已经实现L2级功能的全面普及,一部分在中高配车型上全面搭载L2级功能,另一部分以相对较低的价格选装,可实现全速域的ACC跟车和车道居中功能;另外,L2+功能是目前各企业布局的重点方向,包含领航辅助、高阶自动泊车、车辆召唤、自动进出匝道等。在L3以上更高级别的功能上,由于目前在法规、算法和技术尚未突破的情况下,企业采用硬件先行的策略,通過豪华的感知硬件,如激光雷达、高清摄像头等,建立起硬件基础,再不断迭代软件功能,布局更高阶的自动驾驶功能。
5 自动驾驶发展趋势预判
自动驾驶环境方面:国家的自动驾驶相关的法规已形成初步框架,多部委协同协作机制日趋完善,规划到2030年率先建成智能汽车强国,预计政策法规方面未来将迎来重大利好;地方上加快布局车路协同等基础设施的发展和5G网络的部署,同时,互联网公司积极追赶国外高精地图相关的先进技术,为自动驾驶的发展提供必要的技术支撑,有望早日实现车路协同。
自动驾驶硬件方面:自动驾驶硬件在近年来的发展趋势主要是激光雷达的普及与核心处理器的快速发展,激光雷达体积和成本均有效压缩,大规模装车成为可能;核心处理器算力发展迅速,高性能芯片成为未来发力的主攻方向。
自动驾驶功能发展方面:得益于供应链的快速发展,L2级驾驶辅助功能的开发成本迅速降低,装备率迅速增加,如车道保持辅助功能和全速自适应巡航功能的装备率分别由2016年的0.07%和0.08%上升至2021年的28.31%和22.87%,未来将逐步走向普及;L2+功能快速发展,L2+功能通过更高的算力和更丰富的感知硬件,实现更长时间、更多场景的辅助驾驶,但仍需驾驶者长时间监督,随着硬件成本的下降,L2+功能是未来差异化驾驶辅助功能的主要发力点;但L3以上功能,涉及到法规、算法和配套的局限,短期内难以实现全场景覆盖,还需要长时间的发展与试错。
6 结语
根据企业现阶段的技术路线和实现的功能,可知L2级自动驾驶功能装备率正在逐步增加,未来将逐渐普及,L2+级自动驾驶技术是近期企业自动驾驶技术的主要发展方向,L3级自动驾驶技术的实现还需较长时间的研究与发展。
参考文献:
[1]黄国凯.人工智能在智能网联汽车上的应用进展研究[J].内燃机与配件,2022(03):226-228.
[2]刘琨,付锐,许建伟.制造业数字化转型背景下战略管理会计创新路径探析——以长安汽车为例[J].国际商务财会,2021(15):32-39.
[3]李克强,戴一凡,李升波,边明远.智能网联汽车(ICV)技术的发展现状及趋势[J].汽车安全与节能学报,2017,8(01):1-14.
[4]李路.美国自动驾驶汽车产品责任及对我国的启示[D].上海外国语大学,2021.
[5]刘文虎.人工智能在汽车自动驾驶中的应用[J].现代制造技术与装备,2021,57(08):195-196.
[6]周苏,李伟嘉,郭军华.基于激光雷达的停车场车辆定位算法[J].同济大学学报(自然科学版),2021,49(07):1029-1038.
[7]王文庆.人工智能在汽车自动驾驶中的应用[J].时代农机,2019,46(09):28-29.
[8]胡博瀚.车辆自动驾驶中人工智能的应用实践微探[J].科技传播,2017,9(05):80-81.
[9]戴震军.人工智能技术应用于自动驾驶汽车面临的挑战及发展趋势分析[J].无线互联科技,2020(6):162-163.
