高速飞行器俯冲段制导控制一体化综述
2023-05-30郭建国梁乐成周敏蒋瑞民
郭建国 梁乐成 周敏 蒋瑞民

引用格式:郭建国,梁乐成,周敏,等.高速飞行器俯冲段制导控制一体化综述[J].航空兵器,2023,30(1):1-10.
GuoJianguo,LiangLecheng,ZhouMin,etal.OverviewofIntegratedGuidanceandControlforHypersonicVehiclesinDivePhase[J].AeroWeaponry,2023,30(1):1-10.(inChinese)
摘要:本文从模型构建和方法设计两个方面对高速飞行器俯冲段制导控制一体化问题进行综述。首先,对俯冲段制导控制一体化模型构建进行总结,依据系统集成度提升程度的不同,分别对分通道制导控制一体化模型、全状态耦合高阶一体化模型,以及集成度提升低阶一体化模型构建进行了介绍,并对飞行器系统和设计模型特性进行了分析,指出了面临的主要设计问题。其次,针对俯冲段制导控制一体化设计难点,从快时变强不确定性鲁棒控制、高阶非匹配不确定性控制,以及考虑多约束控制方面对设计方法进行综述,总结并评述了国内外相关理论的发展现状和不足。最后,对俯冲段制导控制一体化的发展趋势进行了展望。
关键词:高速飞行器;制导控制一体化;俯冲段;不确定性;多约束控制;鲁棒控制
中图分类号:TJ765;V249
文献标识码:A
文章编号:1673-5048(2023)01-0001-10
DOI:10.12132/ISSN.1673-5048.2022.0182
0引言
高超声速飞行器一般指飞行马赫数大于5,飞行高度在20~100km的临近空间先进飞行器[1]。这类飞行器兼具传统航天器和航空器的优点,具有作战空域大、航程远、飞行速度快等特点,可以对各类远程目标进行打击,具有比传统弹道式导弹更强的机动性和突防能力,表现出重要的军事价值[2-3]。
飞行器的制导控制系统直接决定了飞行性能,而俯冲段是决定对目标打击效果的关键。传统的制导控制系统设计基于时标分离假设,将系统分为慢回路制导系统和快回路姿态控制系统,分别独立设计制导律和姿态控制律[4-6],但是这一传统设计思路在面对高超声速飞行器这类复杂高动态系统时,设计局限性突出。高超声速飞行器因其特殊的飞行条件和气动外形,表现出复杂的快时变、强耦合、强非线性、非最小相位等复杂动力学特性,质心运动和绕质心运动的耦合关系加强[7],这是由于高速飞行可能引起制导回路时间常数减小,以及高动态快速下压打击目标时出现时标分离假设失效的情况,从而导致控制性能下降和弹体失稳。此外,传统的制导控制分离设计存在制导和姿态控制指令的传输延迟问题,难以满足高超声速飞行器这类对快速性具有更高要求的系统,尤其是要求飞行器快速机动的俯冲段,因此,为了满足系统综合性能需要,必须进一步考虑加强制导和控制回路的联系,进行一体化的综合设计。
制导控制一体化在制导子系统设计中完全引入了绕质心转动环节,直接产生对执行器的控制指令,克服了时标分离假设的局限性,有助于提升制导控制系统的快速性和飞行器的综合性能,减少制导和姿态控制系统在设计上的重复性和保守性[8]。经过国内外学者的长期研究,出现了大量关于模型构建和方法设计等方面的研究成果。俯冲段制导控制一体化模型构建方面,按照系统集成度逐渐提升的顺序,大致经历了从分通道制导控制一体化模型、全状态耦合高阶一体化模型、集成度提升低阶一体化模型的发展阶段[9]。分通道制导控制一体化模型是将飞行器的三维空间运动分解到纵向和侧向通道,忽略了通道间的耦合关系,对于通道间耦合不严重飞行器一般具有较好的控制效果,但对于面对称气动布局飞行器、弹体姿态快速调整飞行器,难以获得满意的控制效果。全状态耦合高阶一体化模型是基于三维空间运动形式,直接由飞行器与目标相对运动方程、飞行器质心及绕质心动力学方程推导得到,具有表征飞行器全状态耦合关系的特征,一般具有高阶严格反馈形式,是主流的制导控制一体化设计模型,但是模型的复杂性增加了控制器设计困难,且未摆脱制导控制分离式的建模思路。集成度提升低阶一体化模型通过建立部分环节的解析方程等方式,对全耦合高阶一体化模型进行部分替代,进一步加强了各子系统的联系,降低了模型复杂度以及控制器的设计困难,对于面向控制器设计的模型简化处理是一个重要研究方向。
俯冲段制导控制一体化设计方法方面,针对飞行器制导控制所面临的主要问题,国内外学者针对快时变强不确定性鲁棒控制、高阶非匹配不确定性控制、满足多约束条件控制等方面开展了大量研究工作。对于高超声速飞行器面临强烈不确定性问题,发展出了基于滑模变结构控制和H∞控制等鲁棒控制理论的设计方法,其中。对于系统面臨的大量高阶非匹配不确定性问题,主要基于反步控制将制导控制器设计问题转化为输出调谐问题,并通过设计干扰观测器、自适应律等方式对各阶子系统的非匹配不确定性进行补偿,这是当前主流的设计思路。这类通过逐级递归方式获得控制指令的设计思路,要求中间系统状态逐渐跟踪上一步的虚拟控制指令,实际上仍然是控制回路跟踪制导指令的部分制导控制一体化,飞行器的快速响应要求无法保证。另外,制导控制一体化面临多种约束条件的限制,俯冲段主要考虑过程约束和终端约束[10]。终端约束一般包括末端落点、落角和落速约束,而过程约束一般由飞行任务需求决定,包括过载、动压、热流约束等。考虑飞行器姿态约束同样有利于提升控制性能,考虑执行器故障的容错控制也得到广泛研究。
本文对高超声速飞行器俯冲段制导控制一体化设计进行综述。首先,对模型构建进行综述,对分通道制导控制一体化模型、全状态耦合高阶一体化模型、集成度提升低阶一体化模型的构建方法、模型特性以及主要设计问题进行了分析总结。其次,对俯冲段制导控制一体化设计方法进行综述,针对系统面临的设计难点,从快时变强不确定性鲁棒控制、高阶非匹配不确定性控制、满足多约束条件控制三个方面,对相关设计方法的研究进展进行了综述。
1俯冲段制导控制一体化模型构建
针对高超声速飞行器俯冲段制导控制一体化的设计模型,给出面向制导控制器设计的飞行器—目标相对运动关系及其相关模型的构建思路。
1.1分通道制导控制一体化模型
分通道制导控制一体化一般是将飞行器的空间运动分解在纵向和侧向两个解耦平面,分别进行制导控制一体化方法的设计,由于这类设计模型忽略了通道间耦合,模型阶数和设计难度大幅降低,控制器参数减少。
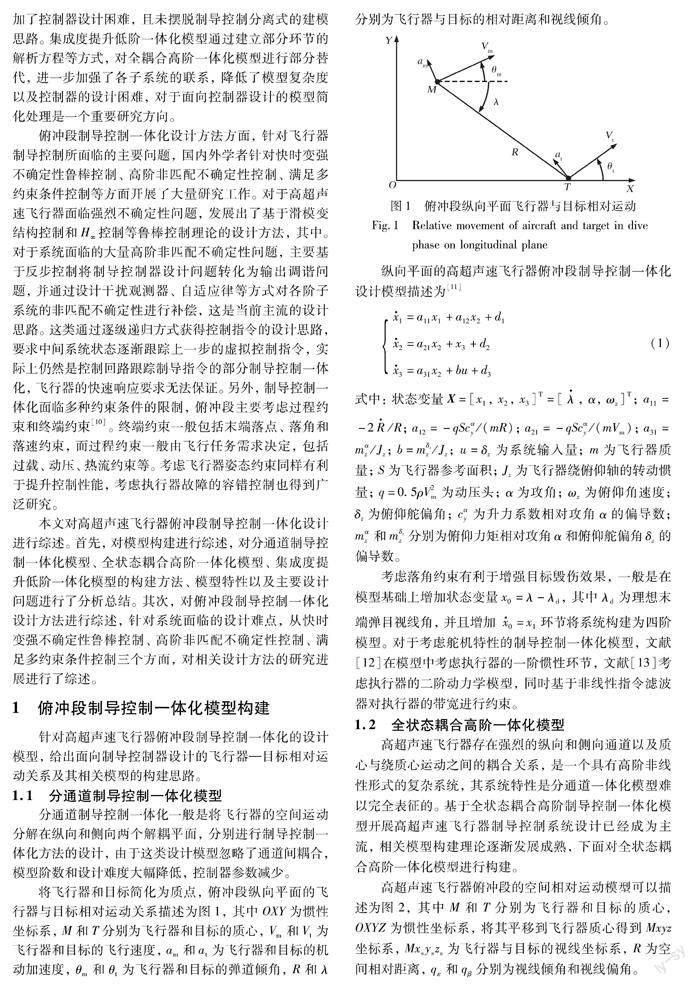
将飞行器和目标简化为质点,俯冲段纵向平面的飞行器与目标相对运动关系描述为图1,其中OXY为惯性坐标系,M和T分别为飞行器和目标的质心,Vm和Vt为飞行器和目标的飞行速度,am和at为飞行器和目标的機动加速度,θm和θt为飞行器和目标的弹道倾角,R和λ分别为飞行器与目标的相对距离和视线倾角。
纵向平面的高超声速飞行器俯冲段制导控制一体化设计模型描述为[11]
x·1=a11x1+a12x2+d1
x·2=a21x2+x3+d2
x·3=a31x2+bu+d3(1)
式中:状态变量X=[x1,x2,x3]T=[λ·,α,ωz]T;a11=-2R·/R;a12=-qScαy/(mR);a21=-qScαy/(mVm);a31=mαz/Jz;b=mδzz/Jz;u=δz为系统输入量;m为飞行器质量;S为飞行器参考面积;Jz为飞行器绕俯仰轴的转动惯量;q=0.5ρV2m为动压头;α为攻角;ωz为俯仰角速度;δz为俯仰舵偏角;cαy为升力系数相对攻角α的偏导数;mαz和mδzz分别为俯仰力矩相对攻角α和俯仰舵偏角δz的偏导数。
考虑落角约束有利于增强目标毁伤效果,一般是在模型基础上增加状态变量x0=λ-λd,其中λd为理想末端弹目视线角,并且增加x·0=x1环节将系统构建为四阶模型。对于考虑舵机特性的制导控制一体化模型,文献[12]在模型中考虑执行器的一阶惯性环节,文献[13]考虑执行器的二阶动力学模型,同时基于非线性指令滤波器对执行器的带宽进行约束。
1.2全状态耦合高阶一体化模型
高超声速飞行器存在强烈的纵向和侧向通道以及质心与绕质心运动之间的耦合关系,是一个具有高阶非线性形式的复杂系统,其系统特性是分通道一体化模型难以完全表征的。基于全状态耦合高阶制导控制一体化模型开展高超声速飞行器制导控制系统设计已经成为主流,相关模型构建理论逐渐发展成熟,下面对全状态耦合高阶一体化模型进行构建。
高超声速飞行器俯冲段的空间相对运动模型可以描述为图2,其中M和T分别为飞行器和目标的质心,OXYZ为惯性坐标系,将其平移到飞行器质心得到Mxyz坐标系,Mxsyszs为飞行器与目标的视线坐标系,R为空间相对距离,qε和qβ分别为视线倾角和视线偏角。
系统状态x1=[q·ε,q·β]T,x2=[αcosγv,αsinγv]T,x2=[α,β,γv]T,x3=[ωx,ωy,ωz]T,u=[δa,δe,δr]T,高超声速飞行器俯冲段全耦合高阶制导控制一体化设计模型可以描述为[14]
x·1=f1(x1)+g1x2+Δ1
x·2=f2(x2)+g2x3+Δ2
x·3=f3(x3)+g3u+Δ3(2)
式中:
f1=
-2R·q·ε/R-q·2βcosqεsinqε+(T11V·m-T12gcosθm)/R
2q·εq·βtanqε-2R·q·β/R+(T21V·m-T22gcosθm)/(Rcosqε);
f2=-YmVmcosβ,ZmVm,0T;f3=(Jy-Jz)ωzωy/Jx
(Jz-Jx)ωxωz/Jy
(Jx-Jy)ωyωx/Jz;
g1=qSmR-T12cαy-T13cαyT22cαycosqεT23cαycosqε;
g2=-tanβcosαtanβsinα1sinαcosα01-tanφcosγvtanφsinγv;
g3=QSJ-1xLxmδaxJ-1xLxmδexJ-1xLxmδrxJ-1yLymδayJ-1yLymδeyJ-1yLymδryJ-1zLzmδazJ-1zLzmδezJ-1zLzmδrz;
Δ1=[Δ11,Δ12]T;Δ2=[Δ21,Δ22,0]T;
Δ3=[Δ31,Δ32,Δ33]T;
Δ11=aTε/R;Δ12=aTβ/(Rcosqβ);
Δ21=-g(sinφsinα+cosφcosγcosα)Vmcosβ;
Δ22=g(sinφcosαsinβ-cosφcosγsinαsinβ+cosφsinγcosβ)Vm;
Δ31=qSLxmx0+qSLxmαxα+qSLxmβxβJx;
Δ32=qSLymy0+qSLymαyα+qSLymβyβJy;
Δ33=qSLzmz0+qSLzmαzα+qSLzmβzβJz。
全状态耦合高阶制导控制一体化模型将飞行器的攻角α、侧滑角β和倾侧角γv作为联系制导与控制回路的中间变量,一般构建为8~10阶的强耦合、强非线性、强不确定性的严格反馈形式,其中包含了大量非匹配不确定性。
落角约束要求增加x0=[qε-qεd,qβ-qβd]T,其中qεd和qβd为理想末端视线倾角和偏角,增加x·0=x1环节和两阶的系统阶数[15]。部分研究考虑了执行机构动态特性,但是由于模型本身的高阶复杂性,相关研究的工程意义并不明显。
1.3集成度提升低阶一体化模型
虽然全状态耦合制导控制一体化模型是基于飞行器六自由度模型直接推导得到的,反映了各通道间以及质心和绕质心运动间的耦合关系,但是面临着模型阶数高、状态变量多等问题,增加了制导控制器的设计困难。集成度提升低阶制导控制一体化模型通过解析模型替代全状态耦合一体化的部分子系统,提升了飞行器制导和绕质心运动子系统的集成度,具有降低系统阶数、简化控制器设计、减少控制参数的优势,更深刻揭示了飞行器各个子系统的联系。
基于加速度在弹道坐标分量的三通道角速率解算模型,以视线角速率和弹体角速率为状态变量,建立以舵机偏转为输入的严格反馈低阶制导控制一体化模型。系统状态变量为x1=[q·ε,q·β]T,x2=[ωx,ωy,ωz]T,系统输入为u=[δa,δe,δr]T,低阶制导控制一体化模型为[16]
x·1=fq+G1x2+d1
x·2=fω+G2u+d2(3)
式中:
fq=-2R·q·εR-q·2βcosqεsinqε2q·εq·βtanqε-2R·q·βR+-1R001RcosqεTSGTGBu·V·w·;
fω=[Δωx,Δωy,Δωz]T;
G1=-1/R001/(Rcosqε)TSGAB;
G2=QSJ-1xLxmδaxJ-1xLxmδexJ-1xLxmδrxJ-1yLymδayJ-1yLymδeyJ-1yLymδryJ-1zLzmδazJ-1zLzmδezJ-1zLzmδrz;
其余变量定义见文献[16]。
低阶制导控制一体化模型实现了绕质心弹体角速率的解析计算,并且降低系统阶数为五阶,减少了跟踪控制回路的设计参数,省略了根据期望加速度反求解飞行器欧拉角的过程,提高了制导控制一体化设计的集成度。
进一步加强高超声速飞行器俯冲段制导控制一体化的集成度,通过建立质心制导被控量和绕质心姿态控制执行器之间的直接解析关系,一种全集成低阶制导控制一体化模型为[17]
x·1=x2
x·2=F+Gu(4)
式中:系统状态变量为x1=[q·ε,q·β]T;x2=[q¨ε,q¨β]T;输入u=[δa,δe,δr]T;G=DABE,D∈R2×3;F∈R2×1,
F=dCdt+dDdtTGBuvw+DEφ·ψ·γ·+DTGBu¨v¨w¨+DMωxωyωz+
dDdtABωxωyωz+DABΔωxΔωyΔωz;
其余变量定义见文献[17]。
全集成低阶制导控制一体化模型建立了飞行器质心速度(质心运动视线角速度)的三阶微分与执行器舵偏角之间的解析模型,相较式(3)的低阶模型,进一步提升了系统的集成度。全集成低阶一体化模型包含两类二阶微分量:一类为飞行器弹体坐标系下能够实际测量的信号,即加速度分量的微分,另一类为飞行器与目标相对运动状态变量的微分,它能够通过相对空间位置的直接求解得到[16]。
受到文献[17]中飞行器加速度分量与弹体角速率之间的解析模型的启发,文献[18]基于弹体角速率动力学特性,建立了一种低阶制导控制一体化模型,同时引入了体视线坐标系的飞行器-目标相对运动模型,准确描述了配备红外成像导引头的高超声速飞行器的带侧窗约束问题。有学者将集成度提升低阶一体化模型的思路引入部分制导控制一体化中,文献[19]根据高超声速飞行器在弹道坐标系沿三轴方向的期望加速度分量,基于解析方程得到了期望弹体角速率,建立了一种基于实测加速度的低阶制导控制一体化模型,省去了根据期望加速度产生欧拉角指令的过程,文献[20]基于类似的思路对飞行器的姿态控制子系统进行了降阶处理。
1.4模型构建对比及特性分析
本节对三种典型的俯冲段制导控制一体化模型构建进行对比分析。
(1)全状态耦合高阶一体化模型:包含大量匹配或者非匹配不确定性的高阶高非线性强耦合模型,较全面反映状态变量耦合关系和非线性关系,存在高阶复杂性导致的制导控制器设计困难问题。
(2)分通道制导控制一体化模型:将空间运动分解到纵向和侧向平面上,对于通道耦合不严重的飞行器或飞行阶段具有良好的控制能力,降低了模型阶数和耦合度,但是面临模型准确度明显降低的问题。
(3)集成度提升低阶一体化模型:直接建立高阶一体化模型部分子系统的解析方程,降低模型阶数和消除系统非匹配不确定性,同时保留模型耦合及非线性关系,不降低模型准确度,但是仍然依赖于假设条件。
开展高超声速飞行器模型特性分析有利于明确系统设计的关键因素,下面以全状态耦合一体化模型為例,结合飞行器六自由度模型和气动模型进行特性分析。
(1)强耦合特性:质心制导和绕质心姿态控制以及通道间存在耦合关系,气动力和力矩通常由状态参数的非线性插值方式获取,高动态系统的控制量和状态量快速变化时耦合关系增强,表现为系统的强耦合性。
(2)强非线特性:俯冲段高超声速飞行器的高速域广,气动力和气动力矩受飞行速度影响较大,由于模型非线性与飞行速度相关,表现为系统的强非线性。
(3)高动态特性:高速飞行时目标从进入视场到击中的时间极大缩短,表现为系统状态快速变化的高动态特性,快速下压打击时由于质心快速变化,容易造成时标分离假设失效。
(4)强不确定性特性:系统包含目标机动、气动参数等未建模因素引起的不确定性,存在参数摄动、外界扰动、测量误差等因素引起的不确定性,表现为系统的强不确定性,要求考虑对抗不确定性的鲁棒控制设计。
(5)高阶非匹配不确定性特性:全状态耦合一体化为8~10阶的高阶复杂模型,包含了大量高阶非匹配不确定性,经典鲁棒控制理论存在非匹配不确定性的“不变性”失效问题,容易丧失控制器的鲁棒性,要求考虑对高阶非匹配不确定性的估计和补偿方法。
(6)多目标约束条件:系统约束条件主要包括落点、落角和落速的末端约束,以及过载、输入、动压、热流的过程约束,俯冲段尤其要求法向过载和输入约束,状态约束控制有利于稳定性提升[21],容错控制对保证故障条件的系统可靠性具有重要意义。
2俯冲段制导控制一体化方法
高超声速飞行器区别于弹道式或巡航式导弹,由于严峻复杂的飞行环境和气动结构,制导控制器设计面临以快时变、强不确定性和非匹配不确定性等为代表的复杂问题,同时要求满足多目标约束条件。目前高超声速飞行器俯冲段制导控制一体化发展出了大量设计理论,但是客观地讲,学术界关于制导控制一体化的概念并未明晰,本文仅针对设计理论的创新性予以总结。
2.1快时变强不确定性鲁棒控制
现有研究大多局限于飞行器固定工作点的控制器设计,对于飞行器的时变参数影响考虑不足,而俯冲下压段高超声速飞行器具有快时变特点,通常采用系数冻结、选取多个特征点或者增益插值方法设计参数时变控制器,但是很难从理论上保證闭环系统在时变工况下的稳定性和控制性能,采用切换多胞形式的时变飞行器稳定控制方法受到关注[22]。此外,高超声速飞行器俯冲段制导控制一体化还面临模型的强不确定性问题,因此提出对抗系统强不确定性的鲁棒设计方法。常用的鲁棒设计方法包括滑模变结构控制和H∞控制等,以强化学习为代表的智能控制方法对提升系统鲁棒性方面同样具有重要意义。
滑模变结构控制是一种结构简单且高性能的非线性控制方法,通过对滑模面和趋近律的设计,迫使系统状态沿着滑模面收敛,从而实现预期的控制目标,系统的滑动模态对于满足匹配条件的不确定性具有不变性。变结构控制方法常用于传统制导控制分离式设计[23],对于制导控制一体化问题,滑模变结构控制主要见于采用集成度提升低阶模型的设计方法中,基于全耦合高阶模型的设计方法更多地将变结构控制作为提升系统鲁棒性的辅助技术。这是由于变结构控制仅适用于处理模型的匹配不确定性,对于全耦合高阶模型的非匹配不确定性,通常还需要结合反步法或动态面方法。
文献[24]根据解析方法将高阶的制导控制一体化模型转化为二阶非线性模型,通过设计线性滑模面和指数趋近律,提出一种算法简单、响应速度快的滑模制导控制一体化方法,明显减少了控制参数的数量,仿真结果表明该方法具有对抗系统不确定性的鲁棒性,但是在气动拉偏试验中仍出现了有限幅度的振荡问题。指数趋近律下,系统状态接近滑模面是一个渐进过程,难以满足飞行器俯冲段的快速性要求。文献[19]基于低阶模型设计制导控制一体化方法,幂次趋近律能够保证系统状态的有限时间收敛,并且采用自抗扰控制方案,在系统中引入扩张状态干扰观测器,增强系统对抗强不确定性的鲁棒性。积分滑模控制通过保证系统初始状态位于滑模面,避免了线性滑模控制趋近阶段的缺点,系统鲁棒性有所提升。文献[25]将系统非线性、目标机动和气动参数变化等作为系统不确定性,建立了一种平面线性制导控制一体化模型,基于积分滑模控制直接求解俯仰舵指令,并且设计了二阶干扰观测器对系统非匹配不确定项及其微分进行估计补偿,克服了反步法求解制导控制一体化问题的缺点,提升了系统集成度,但是系统不确定项复杂,估计精度降低时容易造成控制性能下降。文献[26]基于非线性模型提出了一种滑模制导控制一体化方法,设计了包含不确定性估计量的线性滑模面,并且基于三个非线性干扰观测器技术对系统的匹配和非匹配不确定性进行估计补偿。传统的线性滑模控制结构简单,但是系统状态是以渐进速度收敛到目标点的,为了保证系统状态的有限时间收敛,逐渐发展出了终端滑模控制方法,以及为了避免奇异性的非奇异终端滑模控制方法等,但是目前采用这类滑模变结构控制方法的高超声速俯冲段制导控制一体化设计却鲜有报道。
除了基于低阶模型的滑模变结构控制器,还有学者研究了基于H∞控制和强化学习理论的制导控制一体化设计方法。H∞控制是一种经典的鲁棒控制方法,其将控制系统的性能指标表述为特定闭环传递函数矩阵H∞控制范数的形式,通过抑制噪声到期望输出的传递函数集的最大增益达到对抗系统强不确定性的目的,不但具有较强的鲁棒性,而且能对一些性能指标进行优化。文献[27]基于H∞控制理论推导了一种自适应非线性制导控制一体化方法,实现了对地面目标的落角约束打击,但是未对系统鲁棒性进行充分仿真验证。文献[28]针对面对称飞行器提出一种H∞鲁棒制导控制一体化方法,基于L2增益性能方法实现了扰动衰减,理论证明了不确定性到系统输出信号的L2增益小于等于γ21+γ22+γ23,仿真试验说明了系统在没有主动噪声抑制的条件下仍具有对抗强不确定性的鲁棒性。H∞控制具有强鲁棒性,但是面临着计算量大和控制器设计复杂的问题,并且在设计上具有较强的保守性,因此目前应用于高超声速飞行器这类高动态复杂系统的制导控制一体化设计方法研究仍然较少。为适应飞行器的快时变特性,文献[29]采用切换多胞系统描述飞行器包线范围内的时变飞行动态,基于广义系统方法获得切换多胞形式的变增益H∞跟踪控制器方法,给出闭环系统在时变条件下的抑制稳定性和H∞性能分析方法。文献[30]还针对可变后掠翼的变体飞行器建立了切换多胞模型,能够保证全包线下的飞行稳定,给出利用小凸包算法选取特征点的方法,针对各特征点线性化模型设计了最优控制律。
强化学习理论的制导控制一体化算法通过与环境的交互不断调整更新控制策略,一般不要求系统精确建模和人工参数调整,具有适应飞行器复杂飞行环境的鲁棒性。文献[31]将制导控制设计问题转化为马尔科夫决策过程,提出一种权衡制导精度、能量损耗和飞行时间的奖励函数,基于深度确定性策略梯度算法求解强化学习问题,能够根据观测量生成舵偏角指令准确拦截目标,仿真说明了算法对弹体参数和气动不确定性的良好不确定性。强化学习在解决制导控制问题时具有传统控制方法难以企及的优势,但是由于这类控制器要求较长的训练过程,并且面临控制器稳定性难以证明、最优控制策略收敛难以保证,以及模拟训练环境下的过拟合等问题,目前还难以适应工程上对高动态飞行器制导控制器的设计需求。
2.2高阶非匹配不确定性控制
高超声速飞行器俯冲段制导控制一体化面临模型的高阶非匹配不确定性问题,因此要求提出对抗大量非匹配不确定性的设计方法。除了依靠控制器固有的鲁棒性对抗不确定性的被动控制,主动控制常用在处理非匹配不确定性方面。对于设计模型采用分通道和全状态耦合高阶制导控制一体化的系统,一般的设计思路是基于反步控制类方法,将完整系统分解为多个低阶子系统,通过设计干扰观测器或自适应律对子系统的非匹配或者匹配不确定性进行估计和补偿的自抗扰控制思路[32]。
反步法适合处理高阶控制系统,其本质是通过逐步递归地设计低阶子系统的中间虚拟控制律,不断后退返回整个控制逻辑,能够实现系统的全局跟踪调节,有效解决不确定性的非匹配问题,并且容易与Lyapunov稳定性理论结合证明。文献[33]基于五阶的平面制导控制一体化模型,提出了一种考虑落角约束的反步制导控制一体化方法,基于扩张状态干扰观测器估计和补偿系统的非匹配不确定性,同时在反步法中结合非奇异全局终端滑模控制,保证视线角的快速收敛,仿真试验说明了系统鲁棒性得以提升。由于基于反步法的控制器通常要求系统精确建模,因此结合滑模变结构控制的鲁棒制导控制一体化设计也是学术界的一种普遍做法[13]。
反步法存在求解虚拟控制律微分的问题,尤其对于高阶控制系统,容易引起“指令爆炸”问题。动态面法的出现一定程度上克服了此问题,其通过引入低通滤波器避免了對虚拟控制律的直接微分过程[34],已经发展为反步控制类设计方法的主流。除此之外,指令滤波器也具有类似作用[35]。文献[36]在高阶制导控制一体化模型中考虑了气动耦合项,降低了气动不确定性的复杂度,基于动态面的思路设计了一种考虑三维落角约束的制导控制一体化方法,但是由于缺乏对非匹配不确定性的处理,仿真结果说明系统鲁棒性比较差。文献[37]基于块动态面法提出一种适合倾斜转弯控制的高超声速飞行器制导控制一体化方法,针对模型不确定性,由单值模糊器、高斯隶属度函数、乘积推理器和中心平均解模糊器构成的模糊系统逼近任意非线性函数,采用模糊干扰观测器进行估计补偿。文献[38]在扩张状态干扰观测器中引入了神经网络对复杂系统的不确定性、非线性和扰动项等进行估计,进一步提升了系统对抗非匹配不确定性的鲁棒性。这类以干扰观测器对抗模型非匹配不确定性的方法,一般是通过状态估计来重构和抑制非匹配不确定性,而自适应律能够对系统不确定性的幅值或者上界等信息进行直接自适应估计。文献[39]将高阶动态面法引入高超声速跨介质变外形飞行器的制导控制一体化设计中,通过设计自适应律准确估计了系统的非匹配和匹配不确定性上界,仿真结果表明系统具有对抗高阶非匹配不确定性的能力。
高阶制导控制一体化控制器存在结构复杂问题,实际上并未摆脱分离式设计的串联控制方式,对实际工程的意义存在争议,但是仍有助于利用软件算法代替传统分离式设计的部分硬件功能[40]。设计一种结构更为简单的多约束制导控制器有助于降低系统复杂度,文献[17]基于带侧窗约束的低阶制导控制一体化模型,提出了一种有限时间收敛的动态面制导控制一体化方法,与高阶制导控制一体化方法相比,系统的非匹配不确定项明显减少,控制器的复杂度和控制参数数量都显著降低。
2.3满足多约束条件控制
实际控制系统受到多种约束条件的限制,尤其是飞行器等复杂控制对象。对于高超声速飞行器俯冲段的制导控制器设计问题,主要考虑包括过载和输入约束问题,攻角、侧滑角等欧拉角和弹体角速率的约束问题,也包括执行器故障等其他约束问题。
由于飞行器的执行机构具有物理限制,制导控制一体化系统要求考虑其幅度或者速率的限制问题,否则容易导致控制性能的严重下降。对输入饱和的处理目前主要分为直接设计和抗饱和控制两种,直接设计是在控制器设计中直接考虑输入饱和的影响,从而保证闭环系统稳定,而抗饱和控制在设计上更为灵活,在设计中一般不考虑饱和特性的影响,直接基于控制输入的偏置来补偿饱和所引起的系统状态偏差,减弱输入饱和对系统造成的影响[24]。文献[41]直接对系统输入取饱和函数进行限幅,设计了一种自适应抗饱和控制器来补偿输入饱和所引起的系统状态变化,并且根据Lyapunov理论证明了系统的闭环稳定。另外,同样属于抗饱和控制,Nussbaum类函数和指令滤波器也多用于处理输入饱和问题[42]。Nussbaum类函数本身是一个具有上下界积分区域无穷性质的函数,文献[43]采用Nussbaum增益技术对控制信号进行自适应调节,并且结合双曲正切函数实现了输入约束,同时设计了辅助系统补偿输入饱和对系统状态的影响。Nussbaum方法在理论上是令人满意的,但是由于控制器的保守性和缺乏对实际工程的适用性而受到质疑。指令滤波器结合辅助控制系统的方式同样可以实现输入饱和以及补偿饱和误差,并且对输入的幅值、速率和带宽通道同时具有约束能力,文献[13,38]在模型中考虑了执行机构的高阶动力学特性,基于非线性指令滤波器实现对执行机构的幅值速率以及带宽的约束。
执行器故障时,系统控制能力出现明显下降,甚至可能导致飞行器的失稳和脱靶,因此考虑执行器故障和提升系统可靠性也是一个重要问题。文献[44]将执行器故障与气动参数扰动等因素同样视为系统不确定性,通过设计自适应律估计并补偿的方式予以克服。这类将执行器故障视为系统不确定性的方式简单且易于实现,但是没有对故障特性进行系统分析,属于一种被动容错控制方案。文献[45]提出一种自适应模糊控制的主动容错控制方案,能够根据参数可调的自适应控制律和模糊逻辑系统对执行器故障进行实时补偿,不要求获取非线性不确定性和控制增益等未知信息,具有更强的适应性。
为保证弹载设备的正常工作,防止弹体结构损伤,要求保证飞行器的正常过载,根据气动特性可以将飞行器的过载约束转化为对欧拉角,即攻角、侧滑角和倾侧角的约束问题。另外,对于采用轴对称气动布局的飞行器,以较大的攻角、侧滑角和倾侧角飞行时会降低控制精度,因此要求对飞行器采取限制欧拉角的飞行策略[46]。文献[36]通过约束动态面法的中间虚拟控制律,一定程度对飞行器的攻角、侧滑角和倾侧角进行了限制,为实现状态约束提供了一种简便思路,但是无法保证系统状态不会违反约束。在对系统状态进行严格约束的问题中,目前以障碍Lyapunov函数最为常见[47],障碍Lyapunov函数值在受约束系统状态接近边界值时趋于无穷,能够通过Lyapunov理论直接证明系统状态变量不会违反约束。文献[44,48]提出了满足多约束的动态面制导控制一体化方法,分别基于修正饱和函数对中间虚拟控制律进行饱和约束,并且基于障碍Lyapunov函数对动态面变量进行约束,保证补偿后的状态跟踪误差有界,最后通过理论证明保证了攻角、侧滑角和倾侧角被严格限制在允许范围内。值得注意的是,状态约束下的制导控制一体化方法应当考虑对欧拉角的约束是否会降低系统控制性能,甚至产生一些不可预测的后果。
3俯冲段制导控制一体化控制展望
3.1融合多约束条件的制导控制模型构建
高超声速飞行器俯冲段制导控制系统是包含丰富耦合关系的复杂系统,存在通道间耦合、制导和控制回路耦合、多约束条件耦合等多种耦合关系。区别于制导和控制回路独立设计的传统模型构建思路,以全状态耦合高阶一体化模型和集成度提升低阶一体化模型为代表的模型构建方式,一定程度上加强了制导控制回路的耦合关系,但是目前在融合多约束条件的模型构建方面的研究不足。对多约束制导控制器的研究主要在于设计方法,但是当系统面临大量复杂约束条件时,容易引起稳定域狭小和控制参数数量多等问题,因此有必要对融合多约束条件的制导控制模型构建理论进行研究。
俯冲段制导控制系统面临的主要约束条件包括终端约束和过程约束两个方面。要求考虑的终端约束条件主要是落点和落角约束,对于高超声速飞行器,设计合理的落速控制策略,可避免严重气动加热产生的等离子体形成信号屏障,对准确命中目标具有重要意义[49]。目前考虑落角约束的模型构建是以相对视线角作为被控量,通过设计控制器保证视线角误差趋近零来实现的。落速约束在制导律设计中通常是以增大攻角和自适应制导参数来实现的,少有关于融合落速约束在制导控制模型方面的研究。俯冲段要求考虑的过程约束主要包括导引头视场角和动态特性、飞行过载和动压约束,以及飞行姿态等耦合因素,目前学者们在融合导引头视场约束的模型构建方面开展了相关研究[50],但是通常在模型中忽略了弹体姿态运动,可能引起全捷联导引头锁定目标失败。另外,目前对融合其他过程约束条件的模型构建理论研究较少。
由于融合多约束条件的制导控制模型的复杂性,导致相应制导控制器的设计困难,进一步考虑对模型的简化方法,建立便于控制器设计的融合多约束条件的制导控制简化模型,同样具有现实意义。
3.2满足工程多目标约束条件的制导控制方法
实际工程要求考虑系统的多目标约束条件,高超声速飞行器制导控制系统在实际俯冲飞行段和对目标打击过程中面临多目标约束条件的限制,主要包括终端约束和过程约束。终端约束主要是落点、落角、落速约束,过程约束主要是过载、输入、动压、热流、部分系统状态约束。此外,还存在导引头视场角约束,以及天线罩误差、导引头隔离度、执行器故障的容错控制等大量实际要求。迄今为止,学者们在考虑多目标约束问题方面开展了大量研究,但是大部分工作属于单目标或者少数目标约束,缺乏成熟的同时考虑全部过程和终端约束条件的俯冲段制导控制设计理论,因此开展工程意义上满足多目标约束条件的制导控制方法具有重要意义。
考虑满足工程多目标约束条件的制导控制器设计涉及大量控制参数的设计问题,而控制参数设计直接关系飞行品质和弹体稳定。高超声速飞行器是一个包含大量不确定性的复杂非线性时变系统,而俯冲飞行阶段具有高动态特性,增加了制导控制器参数的选取难度。目前一种解决方式是通过大量离线仿真试验得到合适的控制参数组合,但是需要大量的時间和精力,而且实际的控制效果没有理论保证。另外一种思路是将问题转化为双目标或者多目标优化问题,通过凸优化等算法进行参数寻优,但是涉及非凸系统的凸化问题,以及计算效率满足飞行器快速性要求等方面的问题。因此,对满足多目标约束条件的制导控制器的参数设计理论进行研究具有重要理论和工程应用价值。
3.3满足综合性能的制导控制智能算法
传统的飞行器制导控制器是基于非线性和鲁棒控制理论进行设计的,为了获得满意的控制性能,一般要求建立系统精确模型。但是高超声速飞行器具有飞行大空域和宽速域特点,飞行环境复杂,难以通过大量地面试验准确获得全包络气动数据,也很难对飞行器的内部动力学解析关系进行准确建模,因此传统的离线制导控制方式难以克服强烈不确定性造成的模型未知影响,无法对实际飞行过程中产生的误差进行修正,引起控制精度下降甚至目标脱靶的情况。在线制导控制智能算法是一种基于飞行数据支持的,能够根据实际飞行状况不断在线学习,克服模型未知条件,且模型精度随时间逐渐收敛的新方法,是具有弱模型和无模型依赖特征的先进制导控制系统设计思路。
在线制导控制智能算法有利于进一步提升系统综合性能。例如,利用强化学习算法能够不断生成制导控制智能体,并实时更新飞行控制策略,不断校正实时飞行误差,具有不依赖大量地面数值仿真的控制参数自动调整的能力[31],克服传统离线控制方式在控制参数选择方面的保守性。此外,在线制导控制智能算法有利于权衡系统在控制精度、控制能量、飞行时间等多种性能指标方面的奖励函数,生成一种满足综合性能指标的控制器。另外,智能算法还能够考虑执行器故障等特殊情况下的容错控制,对于提高飞行器适应飞行环境突变和临时任务突变的能力具有重要作用。
4结束语
高超声速飞行器的出现和发展对既有战争模式具有颠覆式影响。高超声速飞行器的制导控制系统面临着以快时变、强不确定性、非匹配不确定性、多约束条件等为代表的复杂特性。本文针对高超声速飞行器俯冲段制导控制一体化设计问题进行综述,总结了主要的制导控制一体化设计模型,对模型特性和主要设计问题进行了分析总结,认为基于非线性和鲁棒控制理论进行设计的传统飞行器制导控制器,难以克服强烈不确定性造成的模型未知影响,无法修正飞行误差,导致控制精度下降甚至目标脱靶,而在线制导控制智能算法将会是一种能够在线学习,克服模型未知条件,具有弱模型和无模型依赖特征的先进制导控制系统。
参考文献:
[1]DingYB,WangXG,BaiYL,etal.AnImprovedContinuousSlidingModeControllerforFlexibleAir-BreathingHypersonicVehicles[J].InternationalJournalofRobustandNonlinearControl,2020,30(14):5751-5772.
[2]SunXY,ChaoT,WangSY,etal.ReviewofStudiesonIntegratedGuidanceandControlDesignApproach[C]∥27thChineseControlandDecisionConference,2015.
[3]郭建国,杨胜江,鲁宁波,等.基于Lyapunov方程的高超声速飞行器变结构控制[J].现代防御技术,2021,49(6):1-8.
GuoJianguo,YangShengjiang,LuNingbo,etal.LyapunovEquation-BasedVariableStructureControlforHypersonicVehicles[J].ModernDefenceTechnology,2021,49(6):1-8.(inChinese)
[4]LiaoYX,LiHF,BaoWM.Three-DimensionalDivingGuidanceforHypersonicGlidingVehicleviaIntegratedDesignofFTNDOandAMSTSMC[J].IEEETransactionsonIndustrialElectronics,2018,65(3):2704-2715.
[5]卜祥伟.高超声速飞行器控制研究进展[J].航空兵器,2018(1):47-61.
BuXiangwei.ProgressonFlightControlofHypersonicFlightVehicles[J].AeroWeaponry,2018(1):47-61.(inChinese)
[6]DingYB,WangXG,BaiYL,etal.NovelAnti-SaturationRobustControllerforFlexibleAir-BreathingHypersonicVehiclewithActuatorConstraints[J].ISATransactions,2020,99:95-109.
[7]穆凌霞,王新民,谢蓉,等.高超音速飞行器及其制导控制技术综述[J].哈尔滨工业大学学报,2019,51(3):1-14.
MuLingxia,WangXinmin,XieRong,etal.ASurveyoftheHypersonicFlightVehicleandItsGuidanceandControlTechnology[J].JournalofHarbinInstituteofTechnology,2019,51(3):1-14.(inChinese)
[8]ZhangDH,MaP,WangSY,etal.Multi-ConstraintsAdaptiveFinite-TimeIntegratedGuidanceandControlDesign[J].AerospaceScienceandTechnology,2020,107:106334.
[9]王建華,程龙,刘党辉,等.高超声速飞行器制导控制及一体化设计方法[J].战术导弹技术,2018(4):45-51.
WangJianhua,ChengLong,LiuDanghui,etal.ReviewofIntegratedGuidanceandControlSchemesforHypersonicVehicles[J].TacticalMissileTechnology,2018(4):45-51.(inChinese)
[10]ZhangDH,MaP,DuYQ,etal.IntegralBarrierLyapunovFunction-BasedThree-DimensionalLow-OrderIntegratedGuidanceandControlDesignwithSeekersField-of-ViewConstraint[J].AerospaceScienceandTechnology,2021,116:106886.
[11]王松艳,孙向宇,杨胜江,等.考虑输入饱和的制导控制一体化设计[J].航空学报,2017,38(10):320897.
WangSongyan,SunXiangyu,YangShengjiang,etal.IntegratedGuidanceandControlDesignConsideringInputSaturation[J].ActaAeronauticaetAstronauticaSinica,2017,38(10):320897.(inChinese)
[12]顾攀飞,齐瑞云,郭小平.高超声速飞行器再入自适应容错制导控制一体化设计[J].南京航空航天大学学报,2018,50(6):763-775.
GuPanfei,QiRuiyun,GuoXiaoping.IntegratedDesignofReentryAdaptiveFault-ToleranceGuidanceandControlforHypersonicVehicle[J].JournalofNanjingUniversityofAeronautics&Astronautics,2018,50(6):763-775.(inChinese)
[13]WangL,ZhangWH,PengK,etal.AdaptiveCommandFilteredIntegratedGuidanceandControlforHypersonicVehiclewithMagnitude,RateandBandwidthConstraints[C]∥AsiaConferenceonMechanicalandAerospaceEngineering,2017.
[14]ChongZY,GuoJG,ZhaoB,etal.Finite-TimeIntegratedGui-danceandControlSystemforHypersonicVehicles[J].TransactionsoftheInstituteofMeasurementandControl,2021,43(4):842-853.
[15]赵暾,王鹏,刘鲁华,等.带落角约束的高超声速飞行器一体化制导控制[J].控制理论与应用,2015,32(7):925-933.
ZhaoTun,WangPeng,LiuLuhua,etal.IntegratedGuidanceandControlwithTerminalAngularConstraintforHypersonicVehicles[J].ControlTheory&Applications,2015,32(7):925-933.(inChinese)
[16]王建华.高超声速飞行器制导控制一体化设计方法研究[D].长沙:国防科学技术大学,2017.
WangJianhua.StudyonIntegratedGuidanceandControlDesignApproachforHypersonicVehicles[D].Changsha:NationalUniversityofDefenseTechnology,2017.(inChinese)
[17]WangJH,ChengL,CaiYW,etal.Low-OrderDivingIntegra-tedGuidanceandControlforHypersonicVehicles[J].AerospaceScienceandTechnology,2019,91:96-109.
[18]ChaoT,QuanSM,MaP,etal.Three-DimensionalLow-OrderFinite-TimeIntegratedGuidanceandControlDesignwithSide-WindowConstraint[J].AerospaceScienceandTechnology,2022,121:107355.
[19]AnT,WangJH,PanYL,etal.ALow-OrderPartialIntegratedGuidanceandControlSchemeforDivingHypersonicVehiclestoImpactGroundManeuverTarget[J].MathematicalProblemsinEngineering,2021:7407739.
[20]WangJH,CaiYW,ChengL,etal.ActiveDisturbanceRejectionGuidanceandControlSchemeforHomingMissileswithImpactAngleConstraints[J].ProceedingsoftheInstitutionofMechanicalEngineers,PartG:JournalofAerospaceEngineering,2019,233(3):1133-1146.
[21]DingYB,YueXK,ChenGS,etal.ReviewofControlandGuidanceTechnologyonHypersonicVehicle[J].ChineseJournalofAeronautics,2022,35(7):1-18.
[22]HouYZ,DongCY,WangQ.StabilityAnalysisofSwitchedLi-nearSystemswithLocallyOverlappedSwitchingLaw[J].JournalofGuidance,Control,andDynamics,2010,33(2):396-403.
[23]王建華,刘鲁华,汤国建.高超声速飞行器俯冲段制导与姿控系统设计[J].宇航学报,2016,37(8):964-973.
WangJianhua,LiuLuhua,TangGuojian.GuidanceandAttitudeControlSystemDesignforHypersonicVehicleinDivePhase[J].JournalofAstronautics,2016,37(8):964-973.(inChinese)
[24]王建华,刘鲁华,王鹏,等.高超声速飞行器俯冲段制导控制一体化设计方法[J].航空学报,2017,38(3):320328.
WangJianhua,LiuLuhua,WangPeng,etal.IntegratedGui-danceandControlSchemeforHypersonicVehiclesinDivePhase[J].ActaAeronauticaetAstronauticaSinica,2017,38(3):320328.(inChinese)
[25]GuoJG,XiongY,ZhouJ.ANewSlidingModeControlDesignforIntegratedMissileGuidanceandControlSystem[J].AerospaceScienceandTechnology,2018,78:54-61.
[26]YangSJ,GuoJG,ZhouJ.NewIntegratedGuidanceandControlofHomingMissileswithanImpactAngleAgainstaGroundTarget[J].InternationalJournalofAerospaceEngineering,2018(2):3968242.
[27]孙冰,陈伟.抗控制饱和的鲁棒非线性飞行控制方法[J].北京航空航天大学学报,2021,47(12):2475-2483.
SunBing,ChenWei.RobustNonlinearFlightControlMethodagainstControlSaturation[J].JournalofBeijingUniversityofAeronauticsandAstronautics,2021,47(12):2475-2483.(inChinese)
[28]ZhaoT,WangP,LiuLH,etal.IntegratedGuidanceandControlwithL2DisturbanceAttenuationforHypersonicVehicles[J].AdvancesinSpaceResearch,2016,57(12):2519-2528.
[29]王青,王通,董朝阳.切换多胞飞行器的变增益H∞跟踪控制[J].宇航学报,2015,36(10):1133-1139.
WangQing,WangTong,DongChaoyang.VariableGainH∞TrackingControlforSwitchedPolytopicVehicle[J].JournalofAstronautics,2015,36(10):1133-1139.(inChinese)
[30]王通,王青,江未来,等.基于切换多胞模型的变体飞行器增益调参控制[J].北京航空航天大学学报,2014,40(1):75-79.
WangTong,WangQing,JiangWeilai,etal.GainScheduleControlofMorphingVehicleBasedonSwitchedPolytopicSystem[J].JournalofBeijingUniversityofAeronauticsandAstronautics,2014,40(1):75-79.(inChinese)
[31]裴培,何绍溟,王江,等.一种深度强化学习制导控制一体化算法[J].宇航学报,2021,42(10):1293-1304.
PeiPei,HeShaoming,WangJiang,etal.IntegratedGuidanceandControlforMissileUsingDeepReinforcementLearning[J].JournalofAstronautics,2021,42(10):1293-1304.(inChinese)
[32]韩京清.自抗扰控制技术:估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.
HanJingqing.ActiveDisturbanceRejectionControlTechnique:TheTechniqueforEstimatingandCompensatingtheUncertainties[M].Beijing:NationalDefenseIndustryPress,2008.(inChinese)
[33]LiZB,DongQL,ZhangXY,etal.ImpactAngle-ConstrainedIntegratedGuidanceandControlforSupersonicSkid-to-TurnMissilesUsingBacksteppingwithGlobalFastTerminalSlidingModeControl[J].AerospaceScienceandTechnology,2022,122:107386.
[34]SwaroopD,GerdesJC,YipPP,etal.DynamicSurfaceControlofNonlinearSystems[C]∥AmericanControlConference,1997:3028-3034.
[35]韋俊宝,李海燕,李静.高超声速飞行器新型攻角约束反演控制[J].系统工程与电子技术,2022,44(4):1310-1317.
WeiJunbao,LiHaiyan,LiJing.NovelBacksteppingControlforHypersonicVehiclewithAngleofAttackConstraint[J].SystemsEngineeringandElectronics,2022,44(4):1310-1317.(inChinese)
[36]WangJH,LiuLH,ZhaoT,etal.IntegratedGuidanceandControlforHypersonicVehiclesinDivePhasewithMultipleConstraints[J].AerospaceScienceandTechnology,2016,53:103-115.
[37]趙暾,王鹏,刘鲁华,等.带有模糊干扰观测器的高超声速飞行器一体化制导控制方法[J].国防科技大学学报,2016,38(5):86-93.
ZhaoTun,WangPeng,LiuLuhua,etal.IntegratedGuidanceandControlofHypersonicVehiclewithFuzzyDisturbanceObser-ver[J].JournalofNationalUniversityofDefenseTechnology,2016,38(5):86-93.(inChinese)
[38]WangL,PengK,ZhangWH,etal.NeuralExtendedStateObserverBasedIntelligentIntegratedGuidanceandControlforHypersonicFlight[J].Energies,2018,11(10):2605.
[39]BaoCY,WangP,TangGJ.IntegratedGuidanceandControlforHypersonicMorphingMissileBasedonVariableSpanAuxiliaryControl[J].InternationalJournalofAerospaceEngineering,2019(1):6413410.
[40]田国兵.带落角约束的BTT飞行器制导控制一体化方法研究[D].哈尔滨:哈尔滨工业大学,2011.
TianGuobing.IntegratedGuidanceandControlforBTTMissilewithTerminalImpactAngleConstraint[D].Harbin:HarbinInstituteofTechnology,2011.(inChinese)
[41]LinL,WangSY,ChaoT,etal.TheDesignofIntegratedGui-danceandControlLawConsideringRudderAngleSaturation[C]∥ChineseControlandDecisionConference,2019.
[42]张健,慕小武.Nussbaum函数及其在系统镇定中的应用研究[J].数学的实践与认识,2017,47(20):239-245.
ZhangJian,MuXiaowu.NussbaumFunctionandItsApplicationinSystemStabilization[J].MathematicsinPracticeandTheory,2017,47(20):239-245.(inChinese)
[43]WangWH,XiongSF,WangS,etal.ThreeDimensionalImpactAngleConstrainedIntegratedGuidanceandControlforMissileswithInputSaturationandActuatorFailure[J].AerospaceScienceandTechnology,2016,53:169-187.
[44]LiuWK,WeiYY,HouMZ,etal.IntegratedGuidanceandControlwithPartialStateConstraintsandActuatorFaults[J].JournaloftheFranklinInstitute,2019,356(9):4785-4810.
[45]WangZ,YuanJP.FuzzyAdaptiveFaultTolerantIGCMethodforSTTMissileswithTime-VaryingActuatorFaultsandMultisourceUncertainties[J].JournaloftheFranklinInstitute,2020,357(1):59-81.
[46]ZhuJW,LiuLH,TangGJ,etal.Three-DimensionalNonlinearCouplingGuidanceforHypersonicVehicleinDivePhase[J].ScienceChina:TechnologicalSciences,2014,57(9):1824-1833.
[47]赵斌,梁乐成,蒋瑞民,等.终端角度约束制导及制导控制一体化方法综述[J].宇航学报,2022,43(5):563-579.
ZhaoBin,LiangLecheng,JiangRuimin,etal.ReviewofGui-danceandIntegratedGuidanceandControlMethodsunderTerminalAngleConstraints[J].JournalofAstronautics,2022,43(5):563-579.(inChinese)
[48]LiuWK,WeiYY,DuanGR.BarrierLyapunovFunction-BasedIntegratedGuidanceandControlwithInputSaturationandStateConstraints[J].AerospaceScienceandTechnology,2019,84:845-855.
[49]溫求遒,黄文宇,卢宝钢.基于LSTM的落速控制最优制导策略研究[J].北京理工大学学报,2022,42(5):511-522.
WenQiuqiu,HuangWenyu,LuBaogang.ResearchonOptimalGuidanceStrategyofTerminalSpeedControlBasedonLSTM[J].TransactionsofBeijingInstituteofTechnology,2022,42(5):511-522.(inChinese)
[50]GuoJ,ZhouJ,ZhaoB.Three-DimensionalIntegratedGuidanceandControlforStrap-DownMissilesConsideringSeekersField-of-ViewAngleConstraint[J].TransactionsoftheInstituteofMea-surementandControl,2020,42(6):1097-1109.
OverviewofIntegratedGuidanceandControlfor
HypersonicVehiclesinDivePhase
GuoJianguo,LiangLecheng*,ZhouMin,JiangRuimin
(InstituteofPrecisionGuidanceandControl,NorthwesternPolytechnicalUniversity,Xian710072,China)
Abstract:Theintegratedguidanceandcontrol(IGC)problemforhypersonicvehiclesindivephaseisreviewedfromtheperspectiveofmodelconstructionandmethoddesigninthispaper.Firstly,thispapersummarizesmodelconstructionofIGCindivephase.Inthesequenceofintegrationimprovingdegree,itintroducesIGCmodelofindividualchannels,couplingfullstatehigh-orderIGCmodel,improvedintegratedlow-orderIGCmodel,andanalyzesandsummarizesthecharactersofhypersonicvehiclessystemanddesignmodels,thenpointsouttypicalproblemsofsystemfacedinmethoddesign.Secondly,withrespecttodesigndifficultiesofIGCsystemindivephase,thispaperreviewsdesignmethodsfromviewsofrobustcontrolunderstronguncertainties,controlmethodsunderhigh-ordermismatcheduncertaintiesandcontrolmethodswithmultipleconstraints.Itpointsoutthecurrentdevelopmentandexistingproblemsofrelatedtheoriesathomeandabroad.Finally,theIGCforhypersonicvehiclesindivephaseisforecasted.
Keywords:hypersonicvehicle;integratedguidanceandcontrol;divephase;uncertainty;multipleconstraints;robustcontrol