基于北斗时空分析的作业质量监测服务应用
2023-05-30董晓宁王亚圣崔亚硕
董晓宁 王亚圣 崔亚硕
摘要:通过搭建农机作业质量监测服务平台,结合北斗卫星定位、物联网、传感器等技术,实现对农机作业环节中农机运行状态参数的实时获取。设计并实现了基于位置时空特征的作业地块划分算法、作业面积统计算法以及作业质量评价模型,分析农机作业过程中的位置轨迹特征和业务特征,对农机作业环节中的质量指标进行自动化精准监测评价。
关键词:北斗卫星定位;轨迹聚类;时空分析;作业质量监测
中图分类号:S126文献标志码:A文章编号:1008-1739(2023)03-62-5

0引言
近几年来,我国农业机械化水平快速提升,机械化生产成为了农业生产的主力军。但是,我国农业机械的技术还不够完善,尤其是广泛使用的小型动力机械存在性能差、不稳定等缺陷,影响了农机作业的质量和效率[1]。而作业质量的好坏对生产的质量、生产成本以及经济效益等因素有直接影响,因此,通过农业机械作业质量的评价可以判断出某个区域的农业生产水平。由于我国现阶段仍然主要以小农户经营的生产模式,使得农机管理部门无法对所有的农机作业质量进行有效的监督与指导[2]。随着农业机械不断向专业化、自动化、信息化与智能化的方向快速发展,通过利用物联网技术,在农机上安装各类传感器,实现了对农机位置、作业状态信息的实时获取,为实现农机作业质量的实时、精准监管提供了可能。
针对上述研究现状及农机实时作业监管困难、农机作业信息收集难、服务信息不对称等问题,通过集成北斗卫星导航技术、物联网技术、智能传感器技术,依托地理信息系统,研发了一种服务平台,实现对农机作业质量的实时、精准监控和分析。
1作业质量监测服务平台
1.1平台总体架构
农机作业质量监测平台主要设计目标是实现在大田农机作业过程中,对农机的位置、作业状态、工况参数信息的实时采集[3],经过数据计算、分析,对农机作业的质量进行统计评价,为农业监管部门提供农业机械使用的深度分析,从而间接实现对农业生产水平的评价分析,同时借助于电子地图进行数据的空间可视化,为农业监管部门提供精准、高效的监管服务,为农业生产决策提供辅助支撑。
平台采用分层结构设计,自下而上分为采集层、基础支撑层、数据层、服务层、应用层和用户层。采集层主要依赖各类传感器设备实现农机位置、农机工作状态、作业参数、作业图像及信号状态参数等实时作业数据的采集;基础支撑层主要包括为系统提供运行环境、存储、运算、网络及安全等资源支撑;数据层实现对农机轨迹数据、业务报表数据、基础信息数据的存储管理;服务层针对业务应用场景实现数据的加工处理、分析、控制等功能服务;应用层通过Web系统、移动App等形式向用户传递数据及实现与用户间的人机交互操作;用户层包括了农户、合作社管理者以及政府监管部门等。

1.2系统模块设计
系统的各服务模块组成和处理流程如图2所示,模块包括数据接入服务模块、数据控制服务模块、数据库服务模块、数据处理计算服务模块、业务应用服务模块,以及农机终端、Web系统、移动端App等。
①数据接入服务模块:主要负责农机终端设备的数据接入、接收数据上报,将数据消息转发至消息队列服务。同时,负责从消息队列获取上层业务下发至农机终端的指令请求,并转发给农机终端设备。为了保障大量终端设备的数据接入,前置了负载均衡服务基于IP_HASH调度算法,搭建数据接入服务集群,以提供高并发服务能力。
②数据控制服务模块:主要负责从消息队列获取农机终端上报的数据信息,进行各类数据的格式化,并转发存储至不同的数据库存储服务中。同时,负责接收上层业务应用中的控制指令消息,通过消息队列转发至接入服务。
③数据库服务模块:结合农机作业场景的特点,根据系统中的数据类型、冷热程度等特征,将数据服务分为了业务信息库、统计报表库、时序数据库、历史数据库服务,针对每个服务的不同特性采用不同的数据库系统,保证了系统数据的高效率写入、查询服务能力。
④数据处理计算服务:主要是基于农机的位置数据、工况参数信息及实时采集的作业状态数据,完成作业地块计算、作业面积计算、作业质量指标计算等处理过程。

⑤农机终端通过JT808、ISO11898协议,实现农机实时位置、农机状态、农机工况及作业图像等数据的采集;Web系统、移动端App提供了平台系统与用户的交互通道,便于用戶进行数据的查询和控制操作。
2作业质量监测评价
针对农机作业环节进行质量监测评价的最小单元是地块,因此需要基于获取的农机作业过程中的全天的位置数据,进行作业地块的划分,然后针对每个作业地块进行作业面积统计、作业质量分析。
2.1作业地块划分
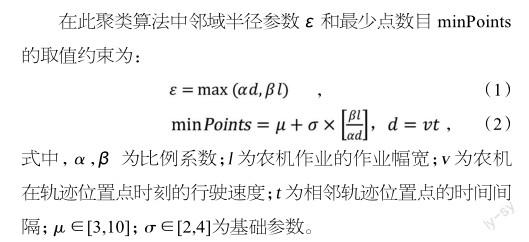
作业地块并不是严格依赖于实际农户耕地的确权边界,而是基于农机位置轨迹的时空关系,近似进行作业区域的划分。通过对农机作业过程中位置数据、工况参数、作业农具参数等数据的统计分析,在实地进行农业生产作业时,农机作业行驶轨迹具有明显的空间、时间聚集特征。通过采用DBSCAN聚类算法,以农机行驶速度、作业幅宽等参数进行约束,将农机作业的轨迹分割为独立的作业地块。
经过上述聚类算法处理后,农机作业轨迹被分割为独立的类簇,每个类簇被定义为一个作业地块。
2.2作业面积统计


2.3作业质量评价
参考农业机械化水平评价指标体系可知[4],农业机械化程度是衡量一个国家或者地区农业机械化发展水平的基础指标,在评价体系中占据了非常重要的作用,其中占据了较高权重的耕种收综合机械化水平主要是对农机作业面积及质量的监测评价。农业机械化水平评价指标如表1所示。

经部分省市农业管理部门调研统计,汇总了部分农机作业质量的评价指标,如表2所示。可以看出,农业生产耕种作业环节中对农业机械化作业质量的监测指标项目主要包括作业深度、地块平整度、作业重叠度、作业速度等内容。

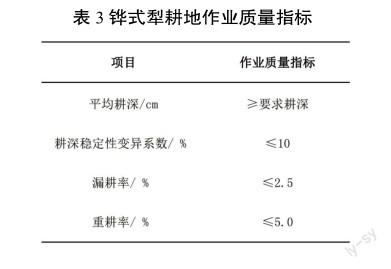
本文着重研究了在耕整地机械作业中应用最广泛的铧式犁的作业质量监测,结合国标要求的铧式犁耕地作业质量指标[5],如表3所示,构建了耕地作业质量评价指数(PQI)模型,对作业质量进行监测评价。

在表4中,1表示在單个作业地块中,在选定采样区域内,耕深合格位置点数量占采样区内所有位置点数量的比重。由于在实地农机作业过程中,在作业地块的起始、结束的地头部分,作业农具需要逐渐的落下、抬起,因此在进行采样区选择时,一般选择作业地块的中部位置,剔除作业地块的地头部分,作业地块样本采样如图3所示。

3应用案例
作业质量监测评价模型在作业质量监测服务平台中进行了实际应用,针对农机作业智能监测业务提供监测评价服务,目前平台已经在河北、河南、甘肃、山西、宁夏等地进行了推广应用,共计服务作业农机20 000多台,监测评价作业面积超过3000万亩,针对深松(深耕)作业、旋耕作业、整地平地作业以及深松播种作业等作业环节进行了监测评价,经验证,该评价模型与实际作业质量评价的一致性达到90%以上,满足了实际农业生产中作业质量自动化监测的需要。
图4为农机作业质量监测服务平台轨迹展示,采用本文方法对作业轨迹进行了“作业地块”的划分。

图5为农机作业质量监测服务平台轨迹展示,可以直观查询每个农机作业点的轨迹位置、作业深度等详细信息。

图6为作业质量评价统计效果,可以直观查看农机每个作业地块的质量监测评价指标情况。

4结束语
设计的作业质量监测评价模型和服务能力,为相关管理部门的农机作业质量监督和管理提供了创新手段。但是,由于我国地域广阔且地区间的农业生产差异化较大、作业操作人员的素质有待提高、农机农艺融合不够深入等原因,农机作业质量评价的提升空间还很大[6]。本文目前设计的评价模型相对比较单一,无法适应不同作物、不同农机的作业环节。作业质量监测评价的工作还需要继续延伸下去,扩展更多样性、更普适性的模型,来完善对农机作业质量监测的评价。
参考文献
[1]周亚萍.农业机械作业质量存在的问题与解决措施[J].农家科技,2020,(1):122.
[2]朱登胜,方慧,胡韶明,等.农机远程智能管理平台研发及其应用[J].智慧农业(中英文), 2020,2(2):67-81.
[3]王聪,裴莉,徐勇,等.大田农业信息监测管理系统设计开发[J].农业与技术,2021,41(1):58-60.
[4] NY/T 1408.1-2007,农业机械化水平评价第1部分:种植业[S],2007.
[5] NY/T 742-2003,铧式犁作业质量[S],2004.
[6]袁博.农机作业质量现状分析与发展建议[J].农业科技与装备,2018,1(2):72-73.
