一种水面垃圾智能清理无人船的设计方案
2023-05-30伍玲密梅奇铠蔡宏业
伍玲密 梅奇铠 蔡宏业
摘 要:【目的】针对目前水面垃圾清理以人工作业为主、设备原始且效率低、可能破坏水域植物等问题,本研究提出一种水面垃圾智能清理无人船的设计方案。【方法】利用价值与作用分析方法中的Pieuvre图表法对无人船的设计需求进行分析,并利用CATIA V5软件对无人船的结构进行三维建模。【结果】本研究从无人船的设计需求分析出发,对无人船的机械结构进行设计,实现无人船的垃圾收集、压缩和打包等主要功能,以及观察、漂浮、避障、动力和控制等辅助功能。【结论】该设计方案具有一定的创新性和可行性,对水面垃圾的自动清理设备的研发具有一定的工程指导意义。
关键词:无人船;结构设计;自动清理
中图分类号:U664 文献标志码:A 文章编号:1003-5168(2023)06-0049-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2023.06.009
The Scheme Design of Unmanned Vessel for Intelligent Cleaning of Aquatic Garbage
WU Lingmi MEI Qikai CAI Hongye
(Zhejiang College of Security Technology, Wenzhou 325016, China)
Abstract: [Purposes] Aiming at the problems of the low efficiency of manual operation as well as primitive equipment, and possible damage to aquatic plants in the current water surface garbage cleaning, this study proposes a design scheme of an intelligent unmanned ship for water surface garbage cleaning. [Methods] The Pieuvre chart method in the value and effect analysis method is used to analyze the design requirements of the unmanned ship, and the CATIA V5 software is used to model the structure of the unmanned ship. [Findings] Based on the analysis of the design requirements of unmanned ships, this study designs the mechanical structure of unmanned ships to realize the main functions of garbage collection, compression and packaging of unmanned ships, as well as auxiliary functions such as observation, floating, obstacle avoidance, power and control. [Conclusions] The design scheme has certain innovation and feasibility, and certain engineering guiding significance for the research and development of automatic cleaning equipment for surface garbage.
Keywords: unmanned vessel; structure design; automatic cleaning
0 引言
目前,水面垃圾清理是以單人乘坐小木船使用渔网或人工驾驶打捞船进行作业为主,这种清理方式较为原始,不仅效率较低,还有可能对水域植物造成破坏。随着无人机技术的不断发展,水空两栖无人机、无人航行器等[1-6]水面无人装备也呈现出结构越来越复杂、功能越来越多样的趋势。
为了减轻对水域进行人工清理的工作量,实现对水域生态环境的保护,本研究提出一种水面垃圾智能清理无人船的结构方案,可实现对水面垃圾的自动清理。
1 水面垃圾智能清理系统总体方案
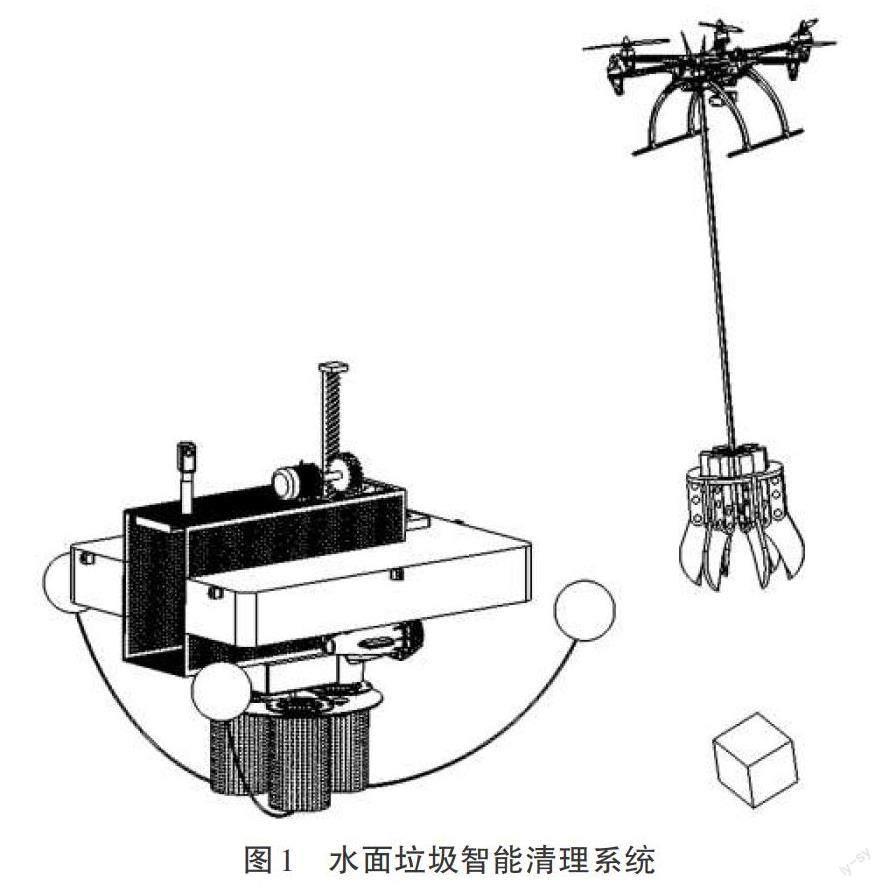
水面垃圾智能清理系统是由水面垃圾智能清理无人船、无人机和控制站组成[7]。作为该系统的主体,水面垃圾智能清理无人船主要用于对水面垃圾进行自动清理。
该系统的主要工作原理如图1所示。无人机使用云台相机对水域进行巡检,从而定位水面垃圾所在的区域,并将位置信息发送给控制站,可实现实时图传。控制站根据上传的水域画面来判断水域面积的大小,从而决定是否派遣无人船队。如果水域面积较小,则只派遣一艘无人船即可完成对水面的清理。控制站要对无人船的任务和路线进行规划,无人船在到达指定区域后,对垃圾进行清理,水面垃圾会先被送到无人船的垃圾收集区,经压缩、运输后进入打包区,打包好的垃圾网由无人机进行回收。
本研究采用价值与作用分析法中的Pieuvre图表法[8],先对无人船的需求进行分析,总结出其主要功能和辅助功能,从而对无人船的机械结构进行设计,并利用CATIA V5软件对其进行三维建模。
2 无人船需求分析
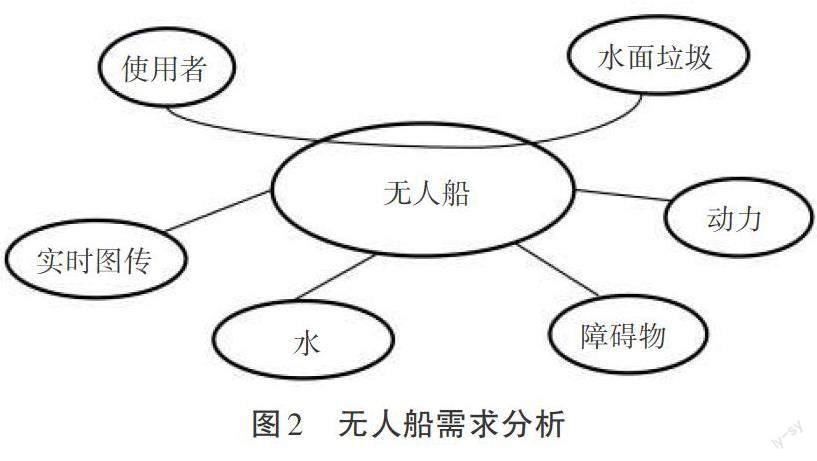
采用Pieuvre图表法对无人船的需求进行分析,如图2所示,总结出的主要功能(FP)和辅助功能(FC)如下。FP1:使用者利用无人船来完成垃圾的收集;FP2:使用者利用无人船来完成垃圾的压缩;FP3:使用者利用无人船来完成垃圾的打包。FC1:无人船能提供实时图传画面;FC2:无人船能漂浮在水面上;FC3:无人船能避开障碍物;FC4:无人船能为自身提供动力。
3 无人船结构方案
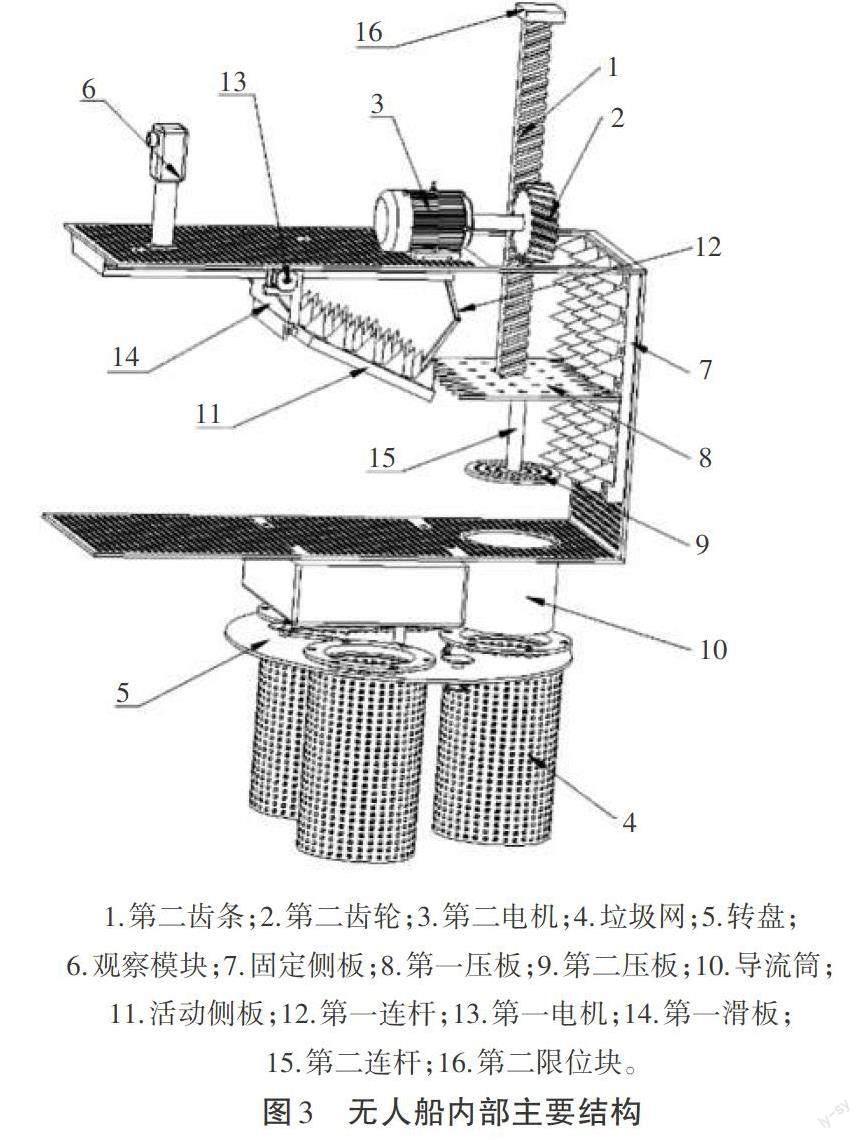
从无人船的需求出发,无人船内部的主要结构如图3所示,包括垃圾收集区和垃圾打包区,可实现对水面垃圾的收集、压缩和打包。而无人船其他辅助部分可实现观察、漂浮、避障、动力和控制等功能。
3.1 垃圾收集区
垃圾收集区是由垃圾压缩装置和垃圾运输装置构成。为了进一步将水和垃圾分离开,可将垃圾收集区整体设计为网格状结构。网格状结构能有效减小箱体的整体重量,降低能耗,并实现垃圾与水的分离,只将垃圾留在收集区内。
3.1.1 垃圾压缩装置。垃圾压缩装置是由固定侧板、活动侧板以及用于实现侧板运动的导轨和动力机构组成。固定侧板和活动侧板主要用于压缩垃圾,能有效减小回收垃圾的体积。固定侧板安装在垃圾收集区的最后方,其与活动侧板配合,来实现对垃圾的压缩。固定侧板上设置有尖刺,用于刺破垃圾,排出多余的水,能有效减小垃圾的体积。滤水孔用于对垃圾进行过滤,只将垃圾保留在收集区内,将水排出仓外。安装的红外传感器可检测收集区内的垃圾是否已满,并将信息传递给控制模块。活动侧板与固定侧板的结构相似,上面设置有尖刺和滤水孔,用于刺破垃圾,减小垃圾的整体体积,并将水过滤出去。活动侧板通过与第一滑板配合,依靠以第一电机为主的导轨及动力机构,可实现活动侧板的移动和旋转,并将垃圾进行压缩处理。
3.1.2 垃圾运输装置。垃圾运输装置由电机-齿轮-齿条机构(包括第二电机、第二齿轮和第二齿条)、第一压板、第二压板、第二连杆和导流筒组成。要保证第二压板、导流筒和垃圾网同轴度,第二压板的外径与导流筒内径相匹配,第二连杆长度与导流筒高度匹配,能保证垃圾高效运输到导流筒的最低端,从而顺利进入垃圾网。限位块位于第二齿条顶部,可避免齿轮与齿条发生脱离。将第一压板的两侧设计为锯齿结构,分别与活动侧板和固定侧板的尖刺进行配合,可避免压板在运行过程中受到阻挡。第一压板和第二压板都设有滤水孔结构,从而减小压板下压的阻力。当固定侧板的红外传感器检测到垃圾已满(垃圾量达到设定值)时,第二电机工作,带动第二齿条向下移动。齿条、第一压板和第二压板之间为刚性连接,压板由齿条带动,并向下运输压缩后的垃圾。在垃圾运输完成后,电机反转,齿条带动压板向上运动,回到初始位置,等待下一次的垃圾运输。
3.2 垃圾打包区
垃圾打包区如图4所示,其主要由垃圾网切换装置和垃圾打包装置组成。无人船能在电量允许的情况下,依次完成三桶垃圾的收集。
3.2.1 垃圾网切换装置。垃圾网切换装置是由电机-齿轮机构(包括第三电机和变向组件)、转盘和三个均匀分布的垃圾网组成。变向组件安装在垃圾收集区底部的外壳内,外壳与垃圾收集区的底部存在一定间隙,从而保证水流能顺利从收集区的底部通过。外壳整体为密封结构,底部装有密封垫圈,可避免其在带动转盘旋转过程中出现渗水的情况。垃圾网切换装置的动力是由第三电机提供的。变向组件是由一对交错的轴斜齿轮组成的,由电机带动旋转,从而带动转盘同步旋转,使其中一个垃圾网转动到与导流筒同轴的位置,等待垃圾运输装置将垃圾压入到网内。在导流筒与垃圾网的竖直方向上设有较小的间隙,一方面能避免转盘在旋转过程中与导流筒发生干涉现象,另一方面也能避免大量垃圾从该间隙处流出。当装满垃圾的垃圾网被回收后,转盘转动,使下一个空的垃圾網转动到与导流筒同轴的位置,等待将垃圾运输出去。将垃圾网设计为网格状结构,其网格尺寸与垃圾收集区的网格尺寸一致。
3.2.2 垃圾打包装置。为了保证三桶垃圾能依次完成打包,转盘上设有三套垃圾打包装置,每套打包装置都是由一个收紧电机、一个收紧盘、一个扎带和一个切刀组成。每个垃圾网的颈部都设有一个凹槽结构,便于安装扎带,扎带末端固定在收紧盘上。当垃圾全部被运输到垃圾网后,收紧电机开始工作,带动收紧盘转动,将扎带绕在收紧盘上,垃圾网口逐渐被收紧。切刀主要由刀本体、刀座、护板和弹簧构成。垃圾打包装置如图5所示,刀座固定在转盘上,护板与底座之间通过两个弹簧连接在一起,刀片固定在底座侧面。护板底面与转盘之间有一定的间隙,避免护板在工作过程中因与转盘发生摩擦而造成磨损。当护板未受到外力挤压时,弹簧保持原长,刀本体尖端位于护板与刀座之间,无法进行切割。当护板受到外力挤压而使弹簧被压缩时,刀本体通过护板中心的方形孔,其尖端露出护板表面。因此,当扎带被收紧盘拉得越来越紧时,扎带末端对切刀护板的挤压逐渐增大,使刀本体的尖端慢慢露出,与扎带接触,并逐渐压迫扎带。当扎带受到的压力超过一定值时,扎带被切断。在垃圾网完成打包后,无人机到达无人船附近上空,对垃圾进行回收。
3.3 辅助功能的结构方案
观察模块位于船体的顶部,可实现360°旋转和上下伸缩,保证良好的视野,为控制站提供实时图传画面[9]。
根据受力分析结果,可将漂浮模块设计为体积较大的壳体结构,位于垃圾收集区的三个侧面,可为无人船提供浮力,增加无人船的整体承载力,从而保证船体能漂浮在水面。供电及控制模块安装在漂浮模块内部,为整个无人船提供动力,控制各电机的运行,实现对无人船工作流程的控制及与控制站的通信[10]。漂浮模块上表面设有壳体开口,打开后可为内部的供电模块进行充电。漂浮模块的前后左右四个方位共设有五个避障模块,从而实现无人船的避障功能。
无人船船体两侧装有动力模块,即两个推进器,可驱动无人船前行。当两个推进器的转速相同时,无人船保持直线运动,当两个推进器的转速不同时,可实现无人船的转弯。
4 结语
本研究对水面垃圾智能清理无人船的结构进行设计,从无人船的需求分析出发,对垃圾收集、压缩和打包等主要功能以及观察、漂浮、避障、动力和控制等辅助功能进行机械结构设计。研究结果表明,该设计方案具有一定的创新性和可行性,对水面垃圾的自动清理设备的研发具有一定的工程指导意义。
参考文献:
[1]杨兴帮,梁建宏,文力,等.水空两栖跨介质无人飞行器研究现状[J].机器人,2018(1):102-114.
[2]阮永井,王琦,邹森,等.水空两栖太阳能四旋翼气动特性研究[J].航空工程进展,2019(5):728-734.
[3]PIERDICCA R,PAOLANTI M,NASPETTI S,et al. User-centered predictive model for improving cultural heritage augmented reality applications: an HMM-based approach for eye-tracking data[J]. Journal of Imaging,2018(8):101.
[4]RAYMUNDO O.Hands-on with Parrot's new Mini Drones:ready for land,air and sea (sort of)[EB/OL].(2015-06-30)[2022-10-28].https://www.macworld.com/article / 2942719 / hands-on-with-parrots-new-minidrones-ready-for-land- air-and-sea-sort-of.html.
[5]RanMarine Technology.The WasteShark Cleaning plastic waste and unwanted biomass from our waters[EB/OL].(2019-01-26)[2022-10-28].https://www.ranmarine.io/produ-cts/wasteshark/.
[6]南京开天眼无人机科技有限公司.两栖特种无人装备[EB/OL].(2019-09-10)[2022-10-28].http://www.ktyuav.com/.
[7]伍玲密,周苏洁,沈茗戈,等.一种水面垃圾智能清理系统:CN215622702U[P].2022-01-25.
[8]Lucidchart.Quels sont vos besoins en matière de création de diagrammes pieuvre?[EB/OL].(2017-04-08)[2022-10-28].https://www.lucidchart.com/pages/fr/diagramme-pieuvre.
[9]丁娃,吳功平,何文山,等.四旋翼飞行器姿态角的自切换串级PID控制方法[J].机械设计与制造,2022(6):208-213.
[10]张淼.山东辖区利用无人机与海巡船实施三维监管研究[D].大连:大连海事大学,2015.
