基于密度聚类的北斗卫星导航弱信号自动捕获方法
2023-05-29刘伦燕周艳唐丽毅
刘伦燕,周艳,唐丽毅
(1.昆明市土地开发整理中心,昆明 650106;2.云南图强测绘有限责任公司,昆明 652702;3.云南同元空间规划设计(集团)有限责任公司,云南 大理 671014)
0 引言
北斗卫星导航系统(BDS)是目前各个领域中使用较多的导航工具,此系统可以为用户反馈高精度坐标信息、速度信息以及时间信息[1].但目前在环境条件多变的情况下,北斗卫星信号会因多径传输的影响而出现信号衰减问题[2].当BDS 信号载噪比小于35 dB-Hz 时变成弱信号,此时导航的用户接收端便会出现信号接收率下降问题,导致BDS 定位功能减弱[3].目前,在BDS 信号质量优化问题中,高精度定位、跟踪BDS 弱信号的前提是准确、自动捕获弱信号.因此,BDS 弱信号自动捕获问题的研究存在必要性[4].
北斗卫星发射的导航信号主要分为伪码、载波、数据码三种分量.伪码分为C/A 码与P 码,前者属于伪随机码序列,是人们常用的粗/捕获码,码速率小于1.1 Mbit/s;后者属于军用的精密码,码速率超过10 Mbit/s.数据码就是人们在导航应用中的导航电文,载波分为L1 与L2 两种链路,频率依次是1 575.42 MHz、1 227.46 MHz.
捕获北斗卫星导航弱信号主要是为了确定可见卫星的相关信息,从而在信号跟踪时掌握可见卫星弱信号的多普勒频移信息、C/A 码相位信息.结合已有资料可知,目前已有学者对BDS 弱信号捕获问题进行了深入研究,如盛志超等[5]提出了基于频域差分的北斗三号(BDS-3)信号快速捕获算法,结合频域差分方法和快速傅里叶运算方法,在高动态工况中快速捕获卫星导航弱信号,捕获结果准确,但此方法未曾考虑外界射频信号干扰情况下,导航信号出现衰减、甚至畸变时,信号捕获效果是否会受负面影响;许睿等[6]提出了基于自相关侧峰消除的BDSB1C 快速高精度捕获算法,使用自相关侧峰消除技术,解决BDSB1C 信号的副载波干扰问题后,通过多项式曲线拟合算法捕获BDS B1C 信号,但此方法没有分析信号混频调制时,噪声信息会导致弱信号信息在噪声影响下难以准确捕获.
针对目前研究所存在的问题,本文提出基于密度聚类的BDS 弱信号自动捕获方法,以期为导航弱信号捕获问题提供可用方法.
1 BDS 弱信号自动捕获方法
1.1 基于密度聚类的BDS 信号多波束抗干扰方法
正常情况下,BDS 接收机获取的弱信号的信号强度为[-160,-140]dBm,且载噪比小于35 dB-Hz.BDS 信号抗扰性较差,对外界射频信号的抗扰性能有待优化[1].目前已有相关研究使用自适应波束的方式,结合阵列天线方向图特性,在导航接收机使用空域抗干扰技术,从抗干扰角度抑制干扰信号.而现实应用中,导航接收机经常出现多颗卫星信号同步接收状态,此时自适应波束抗干扰技术便存在应用局限.而多波束抗干扰技术可通过多个波束的方式,从多个干扰角度抑制干扰信号的负面影响.但接收机接收的信号较多,想保证波束数量不少于信号数量难度较大,以往固定指向角的方法不能考虑全部卫星信号设计波束位置.为此,本文结合BDS 信号来源的先验信息,使用密度聚类算法,获取BDS 信号来源的聚类中心,把此中心设成波束的约束方向,实现BDS 信号多波束抗干扰.图1 是多波束抗干扰方法示意图.

图1 多波束抗干扰方法示意图
设置波束数量与BDS 信号数量依次是M、MS,在外界射频干扰信号数量是MJ的条件下,第mS∈MS个BDS 信号来源为分别为导航信号指向的俯仰角与方位角;第mJ∈MJ个干扰信号来源为分别为干扰信号指向的俯仰角与方位角.由此,波束抗干扰前,导航接收机时刻t接收的导航信号
第m个波束的目标函数是:波束抗干扰后,导航接收机卫星导航信号y′(t)与干扰信号之间相关性最小,则
式中:ϖm为第m个波束的加权矢量最优值[7];SYY为波束抗干扰后,y′(t)中有效信息ymS、干扰信息imJ的相关矩阵,本文用SYY表示卫星导航信号与干扰信号之间的相关性;b(αm,βm)为m个波束指向矢量;E为相关系数.
第m个波束的加权矢量最优值为
多波束抗干扰过程中,波束指向(αm,βm)的设置直接影响抗干扰效果,波束指向的设置需保证波束数目与卫星导航信号数量匹配.为此,文章结合BDS 信号来源信息[8],使用密度聚类算法,将卫星导航信号细分为θ种,先设置信号来源(α,β)的聚类中心,把此中心设成波束的方向.
密度式聚类研究领域中,常用算法之一是密度峰值聚类算法.密度峰值聚类算法可以自动检索多种卫星导航信号聚类中心,完成多种BDS 信号快速聚类.为此,文章将此算法用于BDS 信号分类中,此算法主要使用决策图,检索多种来源BDS 信号的聚类中心.聚类时,聚类中心必备的两种基础属性是:BDS 信号聚类中心点的局部密度,比附近信号样本的局部密度大;差异卫星导航信号聚类中心之间存在明显的距离.详情如图2 所示,满足两种聚类中心基础属性的样本点为点13、点14,其即为卫星信号的聚类中心.
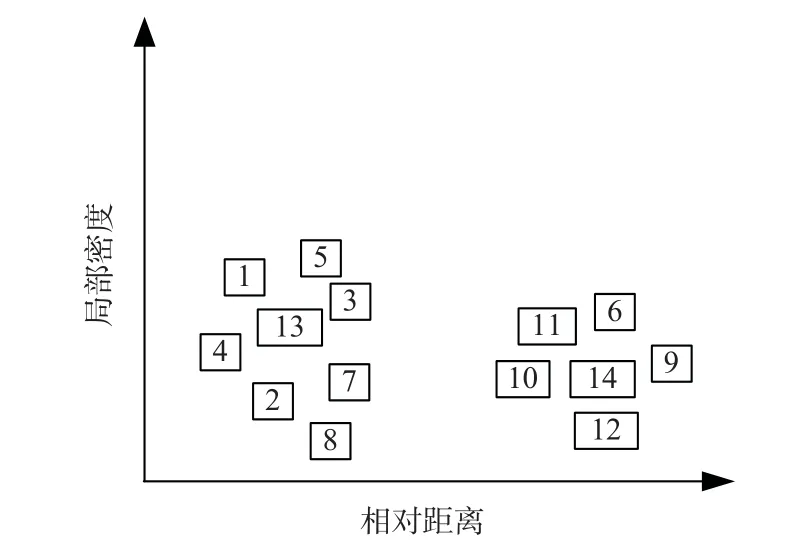
图2 决策图示意图
为使用决策图检索BDS 信号序列样本中,满足2 个基础属性标准的理想聚类中心,密度峰值聚类算法为各个BDS 信号均设计了局部密度ϕj:
式中:cji为北斗卫星j导航信号样本cj与北斗卫星i∈y(t)导航信号样本ci之间的欧式距离;cd为截断距离,是导航信号之间欧式距离升序前2%的距离值.运算密度时,若密度小于截断距离cd,则其密度设成1;大于截断距离时,密度为0.实际上,ϕj是BDS 信号集合里卫星i导航信号样本点和卫星j导航信号样本点距离小于cd的信号数量.
式中:h表示信号属性;ε为BDS 信号样本集合.
BDS 信号相对距离φj为
φj=max(cji),此时卫星j导航信号样本局部密度最大,且与其他卫星的导航信号相对距离最大,其即为聚类中心.
密度峰值聚类算法自动检索多种卫星导航信号聚类中心的具体步骤如下:
输入:BDS 信号样本集合ε、截断距离cd.
输出:BDS 信号聚类结果.
1)运算BDS 信号样本之间距离cji.
2)设置截断距离cd:将m个cji从小到大排序,将0.5 m 位置的cji设成截断距离cd.
3)运算截断距离cd内各个BDS 信号样本的局部密度ϕj、相对距离φj.
4)绘制决策图,设置多种来源BDS 信号聚类中心,聚类中心的设置标准为:导航信号样本局部密度最大,且与其他卫星的导航信号相对距离最大.此聚类中心就是信号类型,代表信号来源.
5)输出BDS 信号样本集合ε中θ种BDS 信号自动聚类结果.
将θ种信号来源信息设成波束约束方向(αθ,βθ),最后导进式(2),完成多波束抗干扰,获取导航接收机卫星导航信号y′(t).
1.2 基于小波阈值的导航信号去噪方法
1.1 小节方法仅可以抑制外界射频信号对卫星导航信号的干扰,而BDS 系统接收机所捕获的导航信号,都是由导航系统射频系统前端混频器处理后的中频信号.BDS 系统中的混频器是一个三端口非线性器件,输入端和本振端所引入的噪声都会对其输出信号存在影响,导致导航信号存在噪声功率.此时如果导航信号强度不高,则弱信号的有效信息会淹没于噪声功率信息之下,信号出现失真[9].为此,本文使用基于小波阈值的导航信号去噪方法,去除多波束抗干扰后信号y′(t)的噪声功率信息,全面优化导航信号质量.使用软阈值函数处理信号去噪问题,会损坏信号高频信息[10],硬阈值函数会损坏信号连续性,所以,文章使用具有可调性的阈值函数对y′(t)执行去噪处理,具体为
式中:y′′(t)为去噪后导航信号;y、Ω依次为BDS 信号y′(t)的高频系数、低频系数;bψ为小波阈值;e为误差函数.
如果bψ处于无穷大状态,则y′′(t)为软阈值函数:
小波阈值的设置合理性对信号去噪效果存在直接影响[11],阈值较大,则BDS 信号中的有效信息会因去噪而出现失真问题;阈值较小,则BDS 信号去噪效果较差[12-14].本文保证每个尺度阈值可以充分体现去噪尺度之间信号变化状态,在去噪过程中使用自适应修正的方式修正阈值,则不同尺度的小波阈值为
式中,ψ、A分别为北斗卫星导航信号小波分解尺度、小波细节系数总量.
BDS 信号噪声标准差dψ为
式中,zs为信号的噪声功率.结合噪声标准差,不断修正阈值,完成导航信号去噪.如果ψ的数值为1,的数值小于1,阈值bψ需变大,此时BDS 信号噪声滤波效果最佳;如果ψ的数值大于1,的数值不小于1,阈值bψ需变小,此时BDS 信号噪声滤波效果最佳,输出去噪后卫星导航信号y′′(t).
1.3 基于相关分析的导航弱信号捕获模型
对导航信号去噪后,将接收的θ种卫星导航信号样本设成
模拟BDS 分布信息如图4 所示.
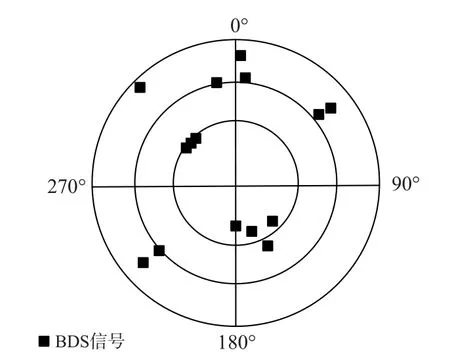
图4 模拟BDS 分布信息
式中:B、v分别为导航信号强度判断的门限值、导航电文;λ、∂分别为信号中伪随机码、码相位时间延时;gL、χ分别为信号的载频和多普勒频率.
导航弱信号捕获的目的是提取弱信号信息,图3为BDS 弱信号捕获模型的示意图.
结合图4 所示的北斗卫星分布信息,本文使用密度聚类算法,提取卫星导航信号来源的聚类中心,将其设成波束指向,处理结果如图5 所示,其中白色矩形是聚类中心.

图5 卫星导航信号来源的聚类中心
BDS 弱信号捕获,在接收机本地提取已知弱信号多普勒频率与码相位延迟的全部组合信息,将本地弱信号与去噪后的导航信号使用相关函数模值计算方法执行相关分析,若相关性大于门限值,便可估计其为弱信号多普勒频率与码相位信息,完成弱信号自动捕获.相关函数模值计算方法是
式中:ta为信号接收时间;Δχ、Δ∂分别为BDS 信号和接收机本地已知弱信号之间多普勒频移差、码相位差.
为验证本文方法对弱信号捕捉的优越性,首先分别使用本文方法、文献[5]和文献[6]中方法对导航信号进行去噪,然后比较使用3 种方法得到的BDS信号中有效信息功率比和噪声信息功率比,其结果如图6 所示.

图6 三种方法得到的BDS 信号功率比
2 实验结果与分析
为验证本文方法的应用效果,实验使用HWAGNSS-8000 多体制卫星导航信号模拟器,模拟北斗动态场景卫星导航信号数据,信号采样率为17.23MHz.在外界射频信号和混频器的干扰下,使用华测CGI-610 高精度MEMS 组合导航接收机接收模拟器发射的导航弱信号,信号采集参数如表1 所示.

表1 信号采集参数
由图6 可知:噪声信息功率比小于20 dB;使用本文方法去噪后,有效信息功率比大于200 dB,此时噪声信息对信号有效信息已不存在明显的负面影响;文献[5]方法的有效信息功率比最低,在30 dB 左右,极易受到噪声信息的负面影响,对后期的弱信号捕捉十分不利;文献[6]方法的有效信息功率比在50 dB附近,但仍存在信号有效信息会受到噪声信息负面影响的可能.表明本文方法可有效进行去噪,为实现弱信号的自动捕获奠定基础.
根据图5 中的6 个卫星导航信号聚类结果设计了6 条抗干扰波束,如图7 所示,在多波束抗干扰作用下,考虑到导航接收机捕获的导航信号因混频器处理时携带噪声而导致导航信号中存在噪声功率.因此,本文使用基于小波阈值的导航信号去噪方法,去除多波束抗干扰后信号的噪声功率信息,达到较高的有效信息功率比,有效避免了噪声信息对信号有效信息的负面影响.

图7 多波束抗干扰示意图
经信号去噪后,设置弱信号门限值为20×105,分别使用本文方法、文献[5]和文献[6]中方法对上文多个BDS 信号中弱信号进行自动捕获,其结果如图8所示.
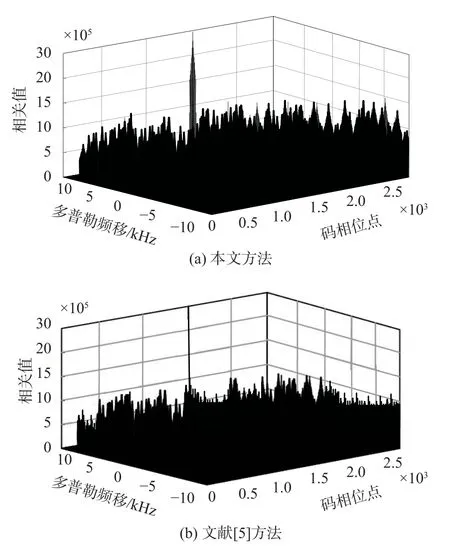

图8 3 种方法对BDS 弱信号的捕获结果
由图8 可知,本文方法的相关值为22×105,大于所设置的弱信号门限值20×105,可估计弱信号码相位点和多普勒频移,分别约为1500 kHz 和5 kHz,而文献[5]和文献[6]方法相关值分别为10×105、15×105,均未超过所设置的弱信号门限值.因此本文方法可有效完成BDS 弱信号的自动捕获.
3 结论
为解决BDS 弱信号自动捕获时易遭到干扰信号所影响导致的捕获精度降低的问题,提出了基于密度聚类的BDS 弱信号自动捕获方法,并在实验中对本文方法的弱信号捕获能力进行测试.测试结果显示,本文方法具备自动捕获BDS 弱信号的能力,并得到弱信号的多普勒频率与码相位信息.由于本文方法引入了波束抗干扰技术、信号去噪技术,深度优化BDS信号质量,从而去除了导航信号中的干扰信息.实验中仅对本文方法对指定环境中弱信号的自动捕获功能进行了测试分析,未来还可深入分析本文方法对多个BDS 弱信号同时捕捉时的精度与效率,并将此类问题作为后续研究的提升方向.