树木涂白车结构及控制系统设计
2023-05-29李帅吴志东刘美奇刘晨明徐凯祥冯瑞琴
李帅,吴志东,2,刘美奇,刘晨明,徐凯祥,冯瑞琴
树木涂白车结构及控制系统设计
李帅1,吴志东1,2*,刘美奇1,刘晨明1,徐凯祥1,冯瑞琴3
(1.齐齐哈尔大学 机电工程学院,黑龙江 齐齐哈尔 161006;2.黑龙江省智能制造装备产业化协同创新中心,黑龙江 齐齐哈尔 161006;3.齐齐哈尔市开农科技有限公司,黑龙江 齐齐哈尔 161000)
针对树木人工涂白效率低、涂白不均匀以及涂白剂对人体伤害大等问题,设计自动涂白车机械结构及控制系统。机械结构由车体、机械臂以及圆筒喷涂结构组成;控制系统以STM32单片机为核心,流量传感器监测喷涂流量,液位传感器检测桶内喷涂剂液面位置,超声波传感器检测车体与树木间距,并采用PID控制算法精确控制喷涂量。通过MATLAB软件建立喷涂量PID控制模型,结果表明,响应时间为0.4s,超调量小于3%,能够高效且稳定控制喷涂流量。涂白车结构及控制系统设计可以为城市绿化设备提供技术保障。
树木涂白;结构设计;MATLAB仿真;PID控制
城市树木可以净化空气与土壤,改善城市环境。为提高树木存活率,防止病菌侵入和虫害,采用树干涂白方式保障树木健康生长[1]。目前,树木涂白通常采用人工操作,人工涂白方式效率低和涂白质量参差不齐的问题突出,且涂白剂对人体存在一定危害。市场上已有多种类型涂白机,但自动化程度和工作效率低,且不能满足不同粗细树木需求[2-5]。PID控制方法广泛应用于流量控制、药剂喷洒等方面,可以有效提升控制精度[6-7]。根据城市树木标准化种植等间距、同高度以及同种类等特点,本文设计一种树木自动涂白车,包括机械结构、硬件控制系统以及PID控制算法,从而提高涂白质量和效率。
1 方案与结构设计
如图1所示,机械结构由车体、涂白剂桶、供液搅拌器、机械臂、液压缸、圆筒喷涂结构组成。车体作为整体装置的承载底盘,长2.0m,宽1.4m,伸展高度1.5m。控制系统由单片机主控、外围电路以及智能控制算法。通过测距传感器检测车体与树木之间距离,当涂白车到达树木位置,涂白车停止前进。伺服电机控制机械臂后端抬起,液压杆1~3控制机械臂伸缩和升降,圆筒喷涂结构开合环绕树木,涂白剂通过输液软管流至圆筒喷涂结构,树木涂白作业开启,喷涂时间根据需求设定。供液搅拌器用于搅拌涂白剂,防止涂白剂凝固。圆筒喷涂结构内部包括喷嘴和回收槽,其中,喷嘴为三层环形固定形式,可以有效增大喷涂面积,实现单位时间内多次喷涂效果,解决喷涂不均匀和喷涂厚度不够的问题。圆筒喷涂结构底部设置环状废液回收槽,回收槽与涂白剂桶连接,在喷涂过程中有效回收溢流的液体。

图1 涂白装置整体二维图
2 控制系统设计
2.1 系统设计
图2为控制系统组成,该系统以STM32单片机作为控制系统核心,系统初始化后,超声波测距传感器检测车体与树木间距,根据检测信号判断是否到达喷液位置。到达喷液位置后,车体驱动电动机停止转动,启动喷涂装置对树木进行涂白作业。液位传感器实时检测喷涂剂桶内液面位置,当液位低于单次喷涂液面时,液位传感器发送高电平信号,单片机接收到高电平信号控制喷涂装置停止工作,蜂鸣器报警。流量传感器用于检测喷涂流量;继电器模块用于控制车体驱动电机和喷涂液压泵。
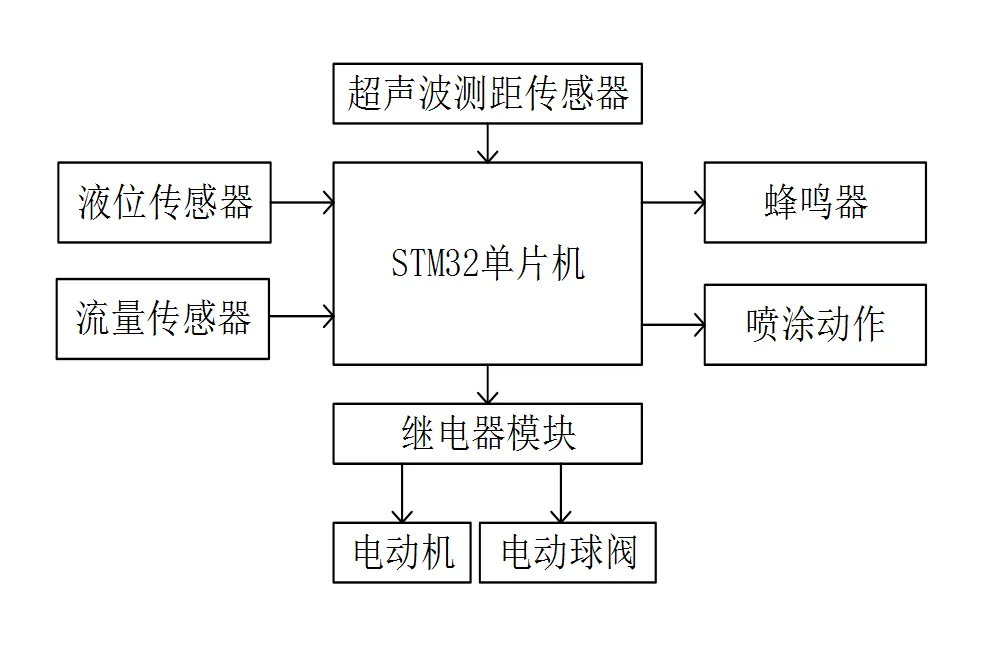
图2 控制系统组成
2.2 喷涂流量PID控制

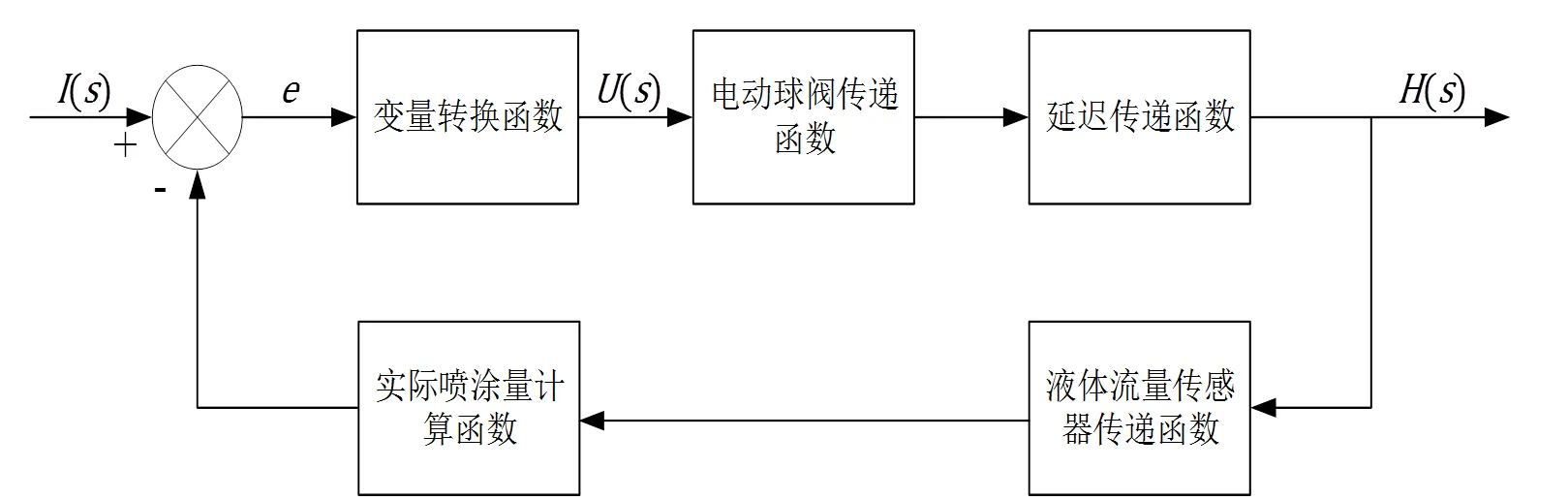
图3 喷涂量控制模型

流量传感器实时监测流量信号,信号传输至主控系统进行处理,执行PID控制过程,并将控制量反馈给电动球阀,实现对喷涂流量的精准控制[10]。实现PID控制原理为


图4 喷涂流量PID控制流程


图5 喷涂流量PID控制仿真系统
由图6可知,在设定条件下,喷涂流量PID控制系统对流量信号响应时间为0.4s,超调量小于3%,能够高效稳定控制喷涂流量。
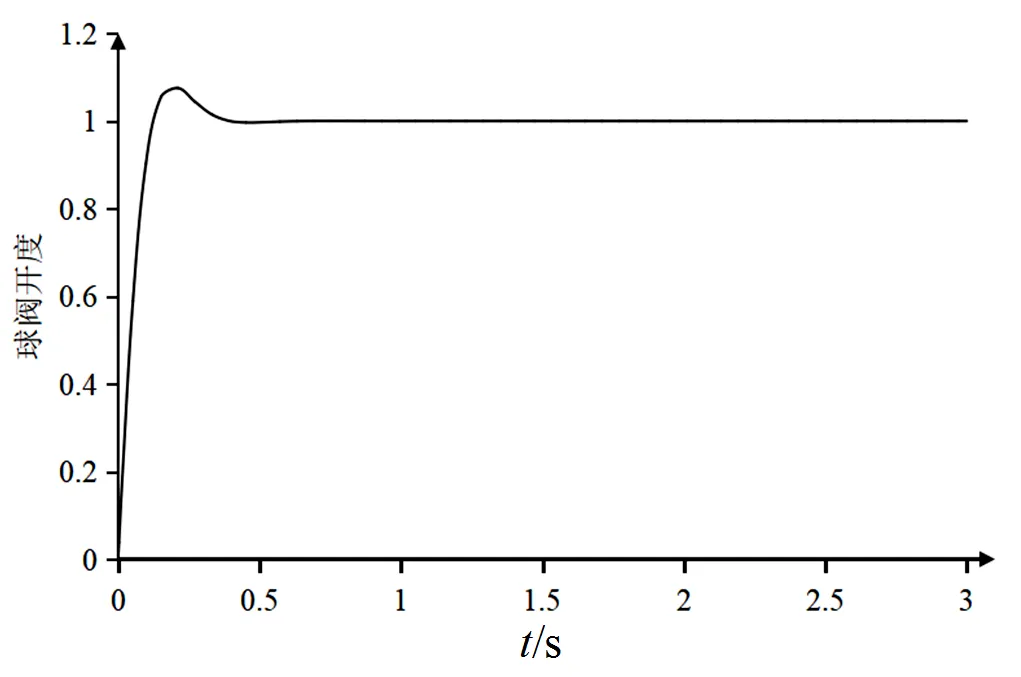
图6 喷涂流量PID控制仿真曲线
3 结束语
本文设计树木自动涂白车结构及控制系统,采用多点布置喷嘴的方式实现均匀喷涂功能,并设置回收槽回收溢流液体,避免浪费。控制系统以STM32单片机为核心,采用超声波测距、液位计流量传感器检测信号,从而实现自动化控制。利用MATLAB软件中的Simulink仿真系统搭建控制模型,模拟、验证喷涂流量PID控制算法,响应时间为0.4s,超调量小于3%,通过控制电动球阀开度,可实现喷涂流量精准控制功能。涂白车结构设计合理,配置自动化控制系统,可以实现高效涂白作业。
[1] 任晓智,李奇洋,黄龙生,等. 摆动式树木涂白装置的仿真设计与制造[J]. 农机化研究,2023, 45(05): 83-87.
[2] 胡鑫,林森,栾厚泽,等. 树木涂白机发展探讨[J]. 农业科技与装备,2020, 299(05): 57-59.
[3] 陈浩. 树木涂白机的设计及研制[D]. 赣州:江西理工大学,2015.
[4] 李海超,袁伟,刘晓飞,等. 一种树木涂白机械的设计与分析[J]. 机械工程师,2015(02): 188-190.
[5] 蒋小辉,胡川,张官祥,等. 自适应式智能树干涂刷装置系统的研制与开发[J]. 电气技术,2019, 20(09): 65-68.
[6] 丁兆驿,赵斌,张晓刚,等. 流量反馈型电液比例阀的模糊PID控制特性[J]. 机床与液压,2022, 50(22): 119-124.
[7] 单永超,张立新,胡雪,等. 棉花膜下滴灌施肥闭环控制系统设计与试验[J]. 农机化研究,2023, 45(04): 119-123.
[8] 窦汉杰,翟长远,王秀,等. 基于LiDAR的果园对靶变量喷药控制系统设计与试验[J]. 农业工程学报,2022, 38(03): 11-21.
[9] 王定康. 基于RBF神经网络PID的农用无人机变量喷施系统研究[D]. 沈阳:沈阳农业大学,2022.
[10] 张斌,高泽明,闫宗良. 基于改进粒子群算法的惯性迟延系统模型辨识及PID参数寻优软件设计与应用[J]. 机电信息,2022(22): 61-63.
Design of structure and control system of tree whitening car
LI Shuai1,WU Zhi-dong1,2*,LIU Mei-qi1,LIU Chen-ming1,XU Kai-xiang1,FENG Rui-qin3
(1.School of Mechanical and Electronic Engineering, Qiqihar University, Heilongjiang Qiqihar 161006, China;2.Heilongjiang Province Collaborative Innovation Center for Intelligent Manufacturing Equipment Industrialization, Heilongjiang Qiqihar 161006, China; 3.Qiqihar Kainong Technology Co., LTD., Heilongjiang Qiqihar 161000, China)
Aiming at the problems of low efficiency of artificial tree whitening, uneven whitening and great harm to human body, the automatic whitening vehicle based on the mechanical structure and control system was designed. The mechanical structure was mainly composed of car body, mechanical arm and cylinder spraying structure. The control system was based on STM32 microcontroller, which integrated flow sensor to monitor spraying flow rate, float level sensor to detect the position of spraying agent liquid level in the barrel, and ultrasonic sensor to detect distance between car body and trees, and the PID control algorithm was used to realize the precise control of spraying volume. The PID control model of spraying volume was established by MATLAB software. The results showed that the response time was 0.4s and the overshoot was less than 3%, which can effectively and stably control the spraying flow. The design of structure and control system of tree whitening car can provide technical support for urban greening equipment.
trees painted white;structure design;MATLAB simulation;PID control
TP393
A
1007-984X(2023)03-0030-03
2023-01-10
2022年省级大学生创新创业训练计划资助项目(202210232005);教育部产学合作协同育人项目(220602817220926);黑龙江省高等教育教学改革研究一般研究项目(SJGY20220410);黑龙江省教育科学“十三五”规划2020年度重点课题(GJB1320388);齐齐哈尔大学教育科学研究项目(GJQTYB202212);齐齐哈尔大学党建研究课题(QQHRUDJ2022-26)
李帅(2001-),男,黑龙江大庆人,本科,主要从事智慧农业机械设计与优化研究,1749949349@qq.com。
吴志东(1985-),男,黑龙江克山人,副教授,博士,主要从事机械装置智能控制、小环境优化控制研究,wzd139446@163.com。
