基于干扰观测器PID茶饮生产的温度稳定控制
2023-05-29王云龙朱双杰孙啸
王云龙 朱双杰 孙啸
(滁州学院 安徽省滁州市 239000)
随着茶饮行业的蓬勃发展。为了茶饮生产质量,茶饮生产过程中,对温度的控制精度一直提出较高的要求[1]。而萃取是茶饮生产中的重要环节,为了萃取时温度稳定,传统的PID 控制策略使用较广泛,但萃取时总是达不到理想的状态,控制过程中屡屡出现超调量大,收敛时间长、不稳定的缺点[2]。
除茶饮生产中,萃取罐还应用于植物、中草药、食品等领域[3]。由于萃取罐应用性较强,是非线性系统,未知变量也较多等特点,故对萃取罐的各种控制举措也层出不穷。针对萃取罐存在的未知变量,文献[4]构造了双线性状态空间系统的状态观测器,有效的抑制了噪声;由于萃取罐温度加热不均匀,文献[5]设计一种大容量分层辐射微波萃取装置,解决了该问题;文献[6]通过利用萃取液回收单元,实现萃取液和萃取物的分离以及萃取液的循环利用,提高萃取物的使用价值。文献[7]通过改造多通道可回收型中试亚临界流体萃取装置,改善了萃取能力。针对镨/钕(Pr/Nd)萃取过程元素组分含量难以在线实时检测的现状,文献[8]引入加权相似度准则和局部模型更新策略,提出一种基于改进即时学习算法,结果表明该算法具有精度高、实时性好等优点。文献[9]利用超声辅助固相技术,解决了固相萃取技术无法低浓度复杂体系的高效精准和可控分离的现状。文献[10]通过建立萃取过程模拟的Elman 网络模型,保障产品所需纯度。文献[11]通过对萃取精馏的节能设计,在扰动情况下,萃取效果依然能快速恢复到扰动前水平。
为了能缓解茶饮业萃取不稳定的情况,本文在设计观测器罐数学模型的基础上,建立了基于干扰观测器补偿的PID 控制系统的仿真模型,并对基于干扰观测器PID 算法和传统PID 算法分别进行了温度控制仿真实验,结果验证基于干扰观测器PID 算法对萃取罐温度控制更有效,由于干扰观测器跟踪干扰并及时补偿[12],使整个系统收敛时间缩短、稳定度高、抗干扰性能较好。
1 萃取罐工作原理
萃取罐由罐体、搅拌电机、罐体过滤网构成,在夹层的底部有冷凝水排水口,夹层底部有冷凝水排水口。萃取罐装置如图1 所示。

图1:萃取罐
在制作茶饮过程中,萃取罐在进行萃取时,将茶饮制作(本次实验所用的是菊花)所需的原料放置在罐内水中进行搅拌萃取,同时通过罐体夹层(内通蒸汽)进行加温,温度达到一定值时,萃取一段时间。当萃取完成后,萃取液通过管道引出,残渣由过滤网截留、清除。整个萃取的温度可以通过罐体夹层冷凝水排水口的排水流量大小或夹层蒸汽流量大小来决定。
2 观测器设计
设计观测器为:
首先对观测器的稳定性进行分析:
定义Lyapunov 函数为:
假设干扰d为时变信号,很小,当取k1较大值时,有,将式(1)(2).代入式(4),得:
通过采用观测器对d 项进行有效的观测,从而实现补偿[5]。加入补偿后的控制律为:
其中u0为PID 控制。
3 基于干扰观测器PID萃取罐温度控制设计
基于干扰观测器PID 温度控制由三部分组成,分别是PID 模块,观测器模块、被控对象模块(萃取罐)。
由图2 知基于干扰观测器PID 温度控制原理:首先由设定值x 与输出值y 进行减运算,得到的偏差进入控制器经过PID 算法,输出值u;观测器模块跟踪被控制对象状态的输出信号,然后进行总扰动进行估计,其中Z1 是总扰动的估计,Z2 是Z1 补偿u 后的总值。最后观测器的总估计补偿PID 控制器的输出,从而对被控对象萃取罐的温度进行控制。

图2:基于干扰观测器PID 萃取罐温度控制框图
4 基于干扰观测器萃取罐温度控制硬件布局
依据干扰观测器PID 萃取罐温度控制设计,对现实中的萃取罐温度控制进行硬件布局,如图3 所示。
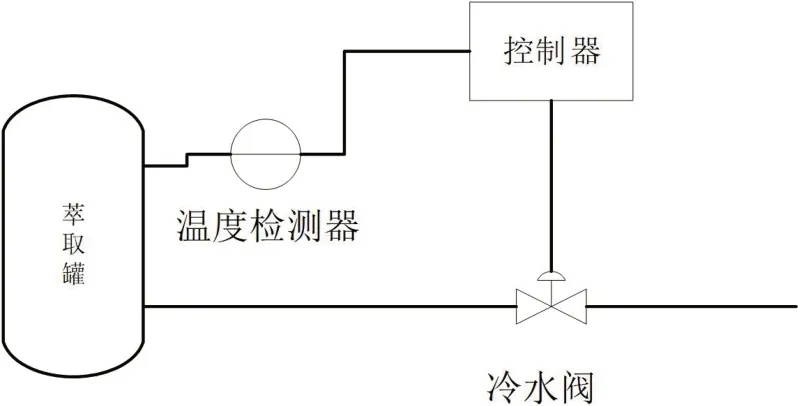
图3:基于干扰观测器萃取罐控制硬件布局
萃取罐温度控制采用闭环回路控制,萃取罐为被控对象,萃取管温度为被控变量,冷水流量大小为操纵量,控制器采用下载基于干扰观测器的PID 控制程序的PLC模块。首先温度检测器采集萃取罐的温度,测量值通过PLC 控制程序运算后,输出值来控制冷水阀门的开度大小,从而控制萃取罐温度的高低。
5 仿真实验分析
在Matlab 仿真软件平台上。为了验证基于干扰观测器PID 控制效果,利用软件平台上的PID 模块和S函数搭建了,PID 萃取罐温度控制与基于干扰观测器的PID 萃取罐温度控制系统的仿真模型。进行了两组对比实验,对比试验1 是在PID 调节参数相同情况下,PID控制与基于干扰观测器PID 控制;对比实验2 是PID 最优控制与基于干扰观测器PID 控制,仿真结果如下。
图4 为了验证干扰观测器的抗干扰功能,和干扰观测器PID 的调节能力,因此图4 中的a,和b 实验中PID 控制器的调节参数大小均相同。
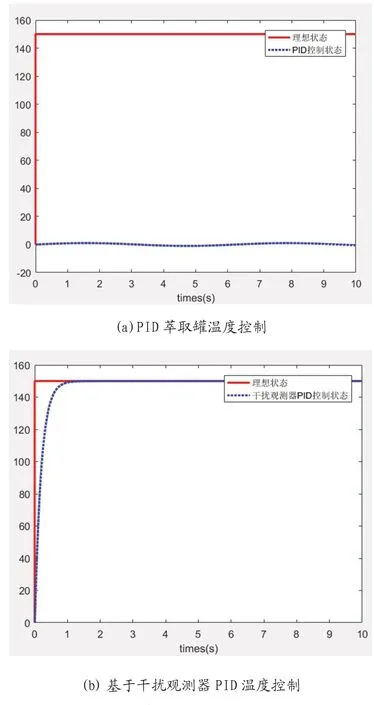
图4:PID 调节参数相同对比(第1 组对比)
第一组对比实验仿真实验结果表明:
(1)从图4 中的a 和b 图可知,在收敛过程中,基于干扰观测器PID 萃取罐温度控制系统相比于传统PID 控制系统响收敛时间更短,超调量明显小于传统PID 温度控制器。
(2)当系统添加干扰和负载时,因观测器对干扰的补偿,故基于干扰观测器的PID 萃取罐温度控制系统相比于传统PID 控制器抗干扰性能更强,稳定性更好,鲁棒性更高。
(3)基于干扰观测器PID 萃取罐温度控制系统稳定值与温度设定值之间的余差比传统PID 温度控制系统要小。
(4)观测器对扰动具有跟踪作用,弥补了传统PID 控制的缺点,使干扰补偿更为准确,增强烈系统的调节能力。
在第二组对比仿真实验中,图5 中的c 采取的是PID 最优参数控制,d 采用的基于干扰观测器的PID 参数控制。由第二组对比实验得出表1 结果。

表1:第二组对比仿真结果表
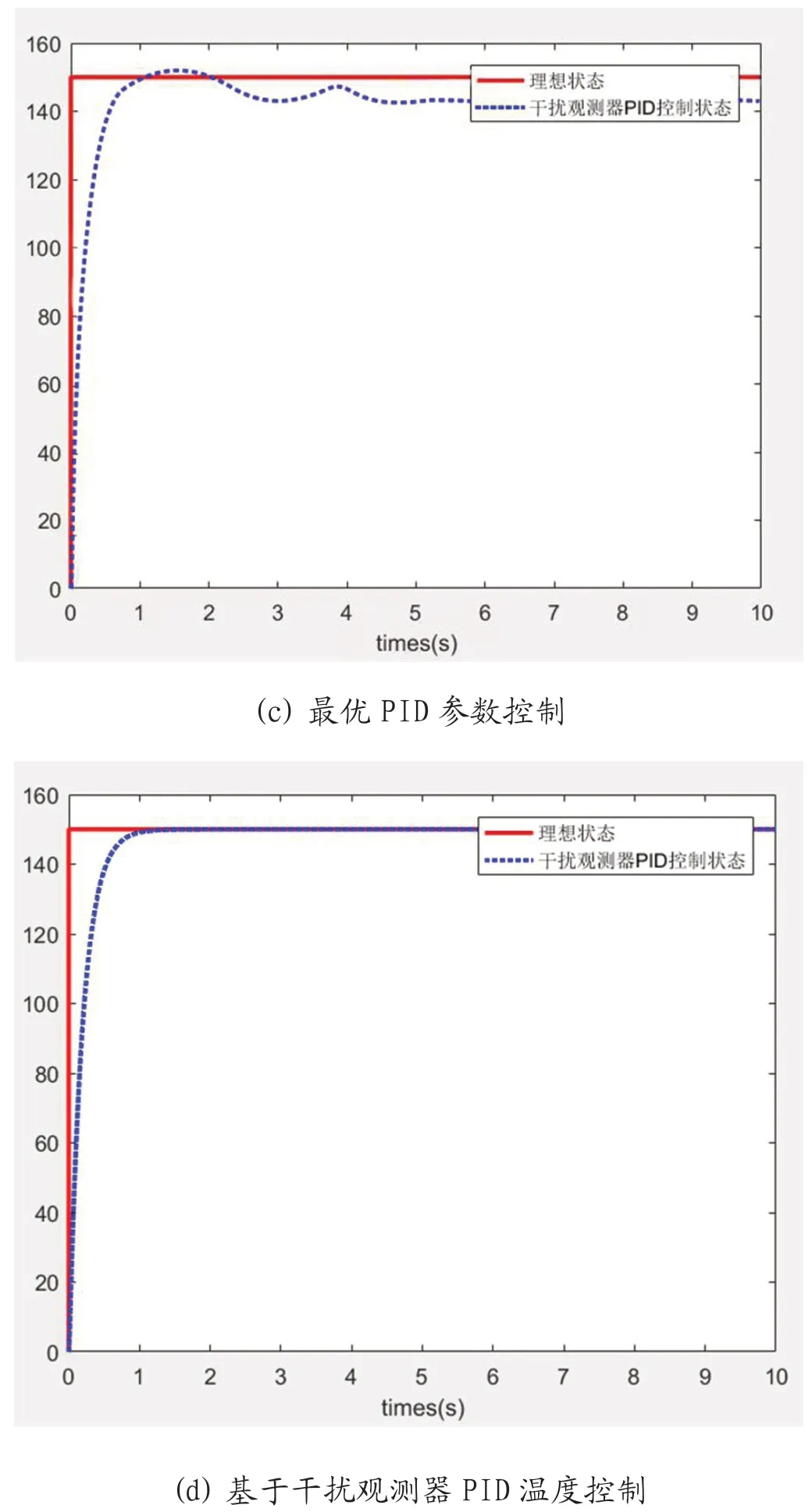
图5:PID 最优控制与基于干扰观测器PID 控制对比(第2 组对比)
根据表1 可知,PID 控制器在用最优参数情况下,它的余差、收敛时间、超调量仍比基于干扰观测器PID控制的效果差。据此进一步说明基于干扰观测器的PID控制抑制干扰的性能优于PID 控制。
6 结论
由于传统PID 控制的萃取瓶温度抗干扰能力差、温度收敛时间长,在传统PID 控制器基础上设计了观测器与PID 控制器相结合的仿真模型,并对它们做了对比实验,实验表明基于干扰观测器的PID 萃取瓶温度控制系统具有较强的鲁棒性,收敛性以及抗干扰性。
在实际生产中,会存在一些不确定干扰、不可测的干扰。故本文所采用的方法可帮助操作人员完成温度控制,保证生产的稳定和高效。在实际使用时,应根据现场环境首先调节PID 参数,再取增加干扰观测器,对于干扰观测器参数改变幅度范围不能过大,以免影响生产。
