无人机三角法测量技术在航道施工监管中的快速判定应用研究
2023-05-27林迪广西壮族自治区梧州航道养护中心
◎ 林迪 广西壮族自治区梧州航道养护中心
1.引言
无人机在航道管理中的应用日趋成熟,工业级无人机可提供定制级的解决方案,搭载不同的任务平台进行航道巡查、航空测绘[1]等工作,但受价格成本制约难以推广使用。普通的消费级无人机因便携性佳和性价比高等优点,如今在航道管理工作中应用更为普遍,但其用途一般只限于短距离巡航、航拍取证等方面。在航道工程施工监管中,经过实践应用分析,利用无人机操作系统中的“与返航点距离”功能,通过使用三角法[2]设定参考点,设计飞行路线,可实现施工船舶作业位置与作业区边界的距离测算,快速判定其是否在规定的施工区域内作业,高效地进行施工监管。
2.无人机三角法测量技术简介
三角法测量技术是利用无人机系统中的“与返航点距离”功能和地图模式界面的飞行轨迹线,飞抵测量目标点位,使用相机俯拍模式辅助定点悬停,通过设计无人机的飞行路线,以其为基础组成直角三角形并获取特定目标点位的与返航点距离数据,经过公式计算,实现任意两点间的直线距离测算。
以大疆御pro铂金版机型为例,当GPS信号强度和定位卫星数量足够时,水平悬停精度可达到+/-0.3米,该机型用于三角法测量的相关配置参数见表1。
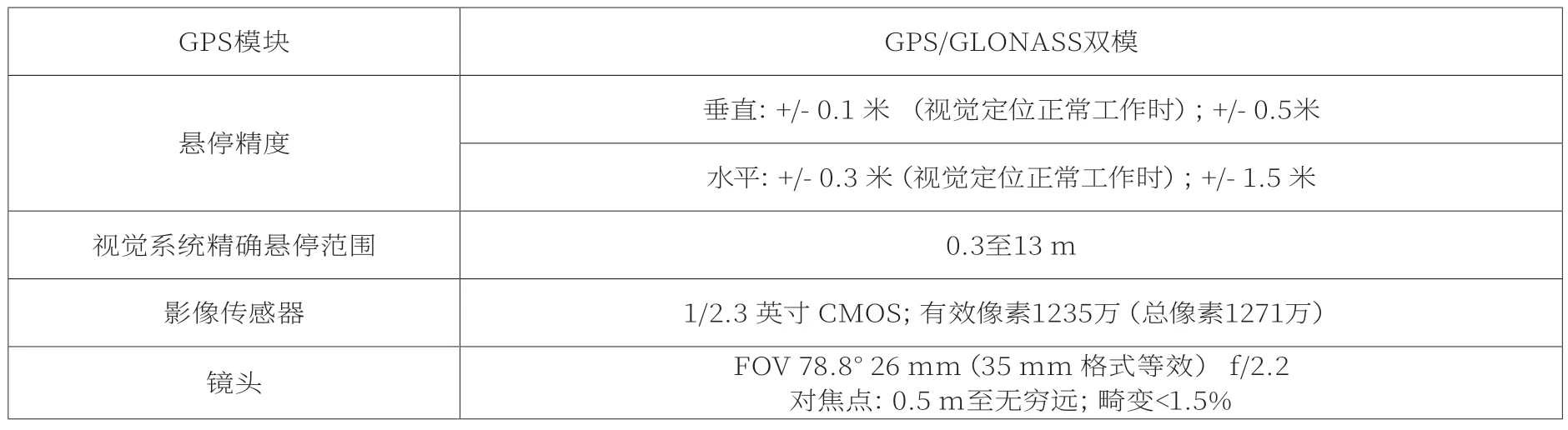
表1 大疆御Pro铂金版部分参数配置表
飞行控制系统APP为DJI GO 4,控制界面地图模式如图1所示,使用三角法测量两点距离,例如图1上的A、C两点,在确定返航点H后,设计飞行路线H→C→A→B,利用飞行路线轨迹组成直角三角形,获取返航点H与测点C、A和垂足B的距离数据。
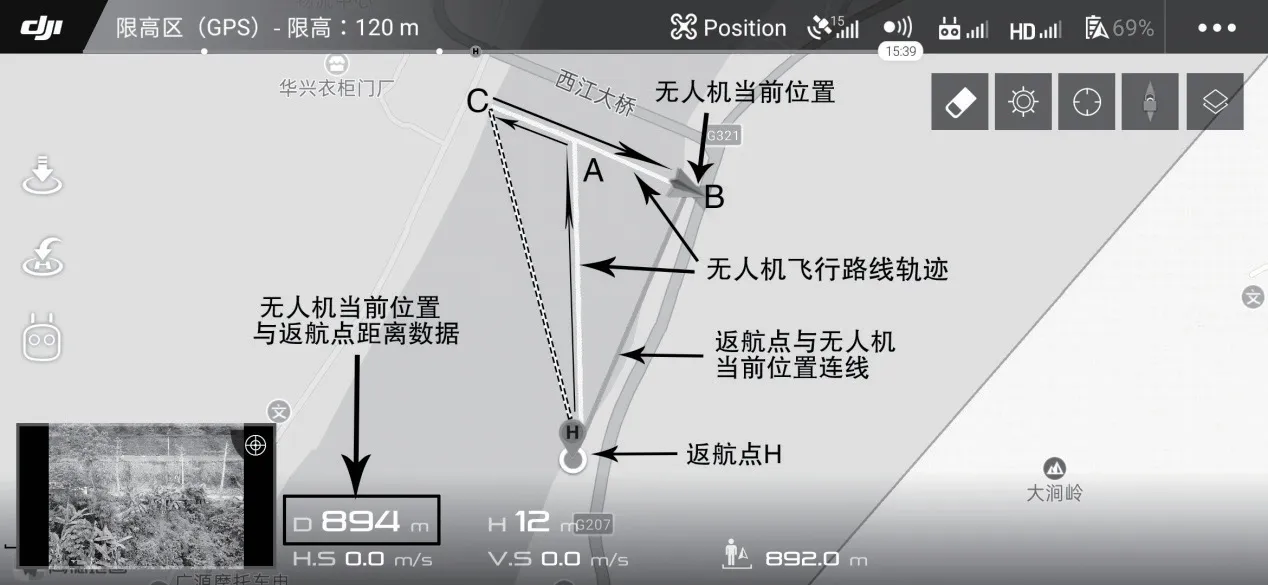
图1 DJI GO 4系统控制界面(地图模式)及三角法测量图示
两个测量对象点A、C间的直线距离定义为L,其中A为与返航点H的近端点,C 为与返航点H的远端点。返航点H与三个特定点位C、A、B的距离数据,分别定义为Lc、La、Lb,当垂足B在AC直线连线的延长线上,根据勾股定理推导出计算公式为:
当垂足B在AC直线连线上,则计算公式为:
3.无人机三角法测量技术在航道施工监管中的应用
某疏浚施工废碴处理工程需要在一段岸线对开水域的卸区内临时堆放的超量抛卸物进行清理作业,施工方案要求作业船舶不能跨越卸区边界施工。
3.1 确定参考线
根据设计图所示(图2),卸区为一个不规则的区域,卸区外侧边线与各段坝田内的岸线基本平行,长度为927米,其端点X到岸线、航道左边线的最短距离分别为167米、117米,端点Y到岸线、航道左边线的最短距离分别为262米、159米。
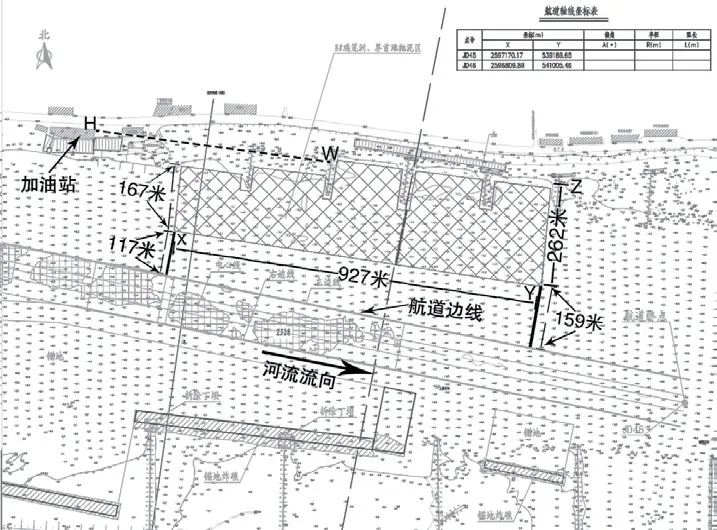
图2 某疏浚施工废碴处理工程卸区图
在这个应用案例中,卸区有上游、下游和外边线(X Y)这三条边界,且施工区域也不仅限于在丁坝的坝田内,情况较为复杂,上游和下游的边界可以在岸上找到参照物判断,但对施工船舶是否超出外边线难以界定。经现场勘查,施工区域所处河道的岸线较顺直,与卸区的内边线WZ基本重合,可以在这段岸线或其延长线上找到适合无人机起降的场地,最后确定在卸区上游与这段岸线处于同一直线上的一个加油站内,于其边缘处空地上选择一点作为返航点,以岸线WZ及延长线作为直角边参考线(见图3),卸区最大宽度YZ=262米为上限,使用三角法测算出施工船舶到岸线参考线的距离,当这一数值大于262米时,即可判定施工船舶超出了卸区外边线XY。
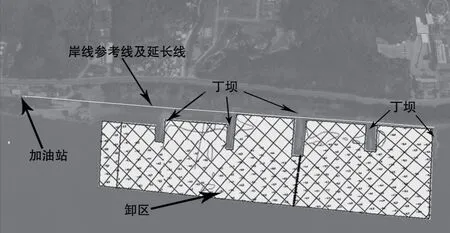
图3 卸区参考线卫星图
3.2 应用实测
在某天对该工程的施工监管中,无人机三角法对施工船舶位置快速判定的实测过程如下:
(1)无人机起飞后,飞抵卸区下游外边线丁坝靠岸线的端点Z定点悬停,调整航向角指向返航点H然后径直返回,在地图中飞出直线航迹作为岸线参考线(图4)。

图4 参考线航迹及施工船A定点
(2)飞抵施工船A的正上方定点悬停,记录H点与该点的距离数据。
(3)调整航向角指向岸线,飞抵岸线找到施工船A到岸线参考线的垂足B1,进行直角校正,测出B1到H点的距离数据635米。
(4)按照上述方法,完成对施工船C、D、E的与返航点距离及到参考线垂足的距离数据测算。
综合数据如图5所示。
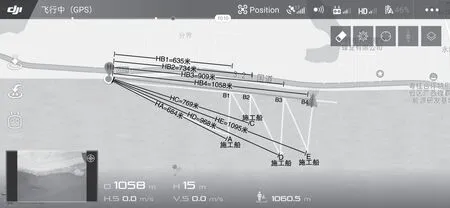
图5 三角法测算施工船到岸线距离示意图
(5)根据公式计算出施工船A、C、D、E到岸线参考线的距离分别为AB1=254.2米、CB2=229.4米、DB3=332.8米、EB4=282.2米,比对卸区边线数据,结合现场航拍照片(图6),可判定施工船舶A、C在卸区范围内作业,施工船D、E到岸线距离大于卸区端点Y到岸线丁坝端点Z的距离262米,超出了卸区范围。
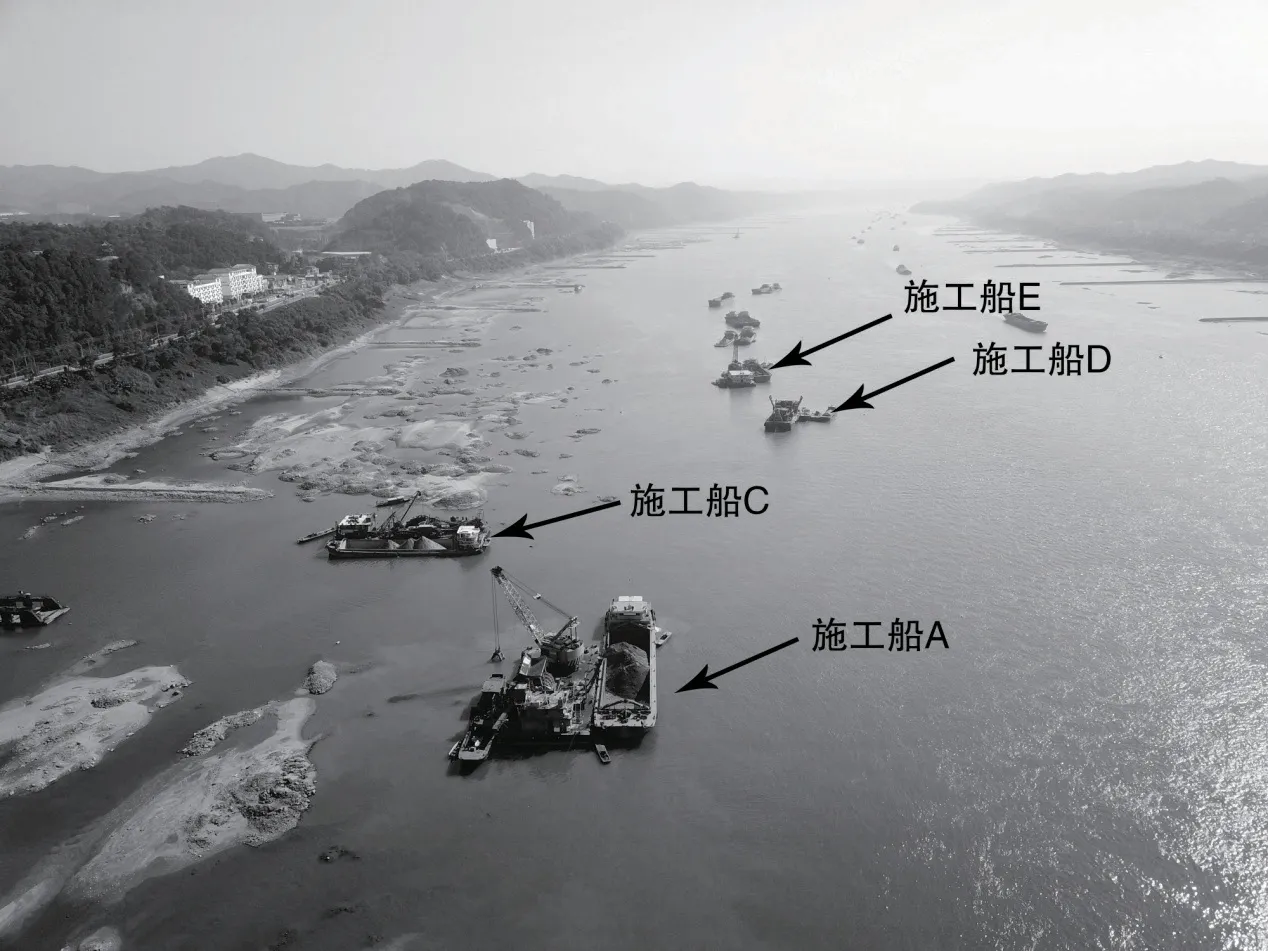
图6 三角法测算施工船现场航拍
3.3 与传统测量方法对比
在上述施工监管应用案例中,若使用传统方法测量河道中施工船舶到岸线的距离,只能靠测量人员使用GPS测量仪、全站仪、测距仪等仪器,且必须登上船舶或抵达船舶到岸线的垂直连线点方可进行测量,测量耗时长效率低,对交通工具和测量点位置要求高,若施工船舶的作业位置变化了还需要重新布点测量,无法快速准确地判定施工船舶与施工作业区边界的距离,也无法及时发现违法违规行为并固定证据。
经过施工监管应用实测分析,无人机三角法测量技术可应对多种情形的距离测量工作,即使面对情况复杂的案例,通过选择适当的参考线和设计合理的飞行路线也能进行有效监管,其优点在于操作步骤简单易懂,测量耗时少效率高,且基本不受地形、通视等因素的影响,目前市价千元级别的消费级无人机都带有可用于三角法测量的功能,性价比极高。不过,其局限性是容易受到天气因素影响,在大风和下雨等天气情况下不能使用。
4.结语
本文通过对无人机三角法测量技术开展深入研究,在航道施工监管中进行应用探索与实践分析,验证了该方法在航道施工监管中快速判定的有效性和可操作性,为航道管理探索出高效和高性价比的应用方法。
