带攻击角约束的抗饱和固定时间收敛制导律*
2023-05-19李晓静马建伟高计委
李晓静,马建伟,高计委
(河南科技大学信息工程学院,河南 洛阳 471023)
0 引言
导弹在现代战争中发挥着相当重要的作用。在末制导过程中不仅要求导弹精确命中目标,而且往往为了增强对目标的毁伤效果,需要对碰撞角度加以约束,因而产生了带碰撞角约束的制导问题[1]。
制导律是影响制导性能的关键技术,是导弹接近目标的过程中应当遵循的弹目之间的相对运动关系,决定着导弹的运动轨迹[2]。到了末制导阶段,目标往往会进行逃逸,目标机动产生的干扰无法准确估计,这就对末制导律的抗干扰性有较高要求。滑模控制对系统的不确定性和外界扰动具有较强的鲁棒性,因此,在制导律设计中得到了深入研究[3]。传统的滑模控制通常采用线性形式的滑模面,能够使系统状态以渐近的方式收敛到平衡点上,收敛时间却是趋于无穷的[4]。然而现代战争中,留给末制导的时间非常短暂,这就需要系统能够快速作出响应。终端滑模控制(terminal sliding mode control,TSMC)通过引入非线性项,加快了系统状态在接近平衡点时的收敛速度,确保系统状态在有限时间内趋于稳定[5],但是有限收敛时间与系统的初始状态有关。对于有限时间稳定的进一步研究,文献[6]提出了固定时间收敛(fixed-time convergence,FTC)的概念,FTC 理论是一种对系统性能要求更高的方法,可通过预先设定时间表达式中的参数计算得到收敛时间。文献[8]讨论了含有不确定干扰的制导系统,通过设计固定时间收敛扰动观测器对干扰进行估计,但所设计的制导律只考虑了攻击角约束。文献[9]提出一种非奇异滑模面,利用自适应控制来对目标机动进行估计,设计了考虑攻击角约束的固定时间收敛制导律,但是并没有考虑加速度约束。文献[10]提出了一种考虑自动驾驶仪延迟特性的非奇异终端滑模方法,但是该方法是有限时间收敛。上述文献中的方法,将攻击角度,收敛时间等部分因素考虑到制导律设计中,但是均未考虑加速度对制导性能的影响,事实上导弹由于物理限制,其加速度的最大值是有限的,因此,本文将考虑设计满足加速度约束的非奇异快速终端滑模制导律。
本文基于固定时间理论,提出一种避免奇异的考虑多约束的固定时间收敛制导律。一方面同时考虑了攻击角和加速度约束问题,将导弹的最大过载考虑到制导律设计中;另一方面利用转换滑模面思想,提出了一种非奇异快速终端滑模面,解决了传统终端滑模的奇异性问题,同时加快了系统的收敛速度。另外,将目标机动视作有界干扰在制导律的设计中加以补偿。最后通过仿真表明,所设计的制导律与传统固定时间收敛制导律相比,能够在满足加速度饱和约束的情况下,在给定的固定时间内以期望的攻击角度更快速拦截目标。
1 问题模型及相关理论知识
1.1 问题模型
导弹拦截过程实际上是一个三维空间问题,然而常把它解耦成两个平面内的相对运动问题,如图1 所示。假设导弹和目标均为质点,速度为常值,分别用M,T,VM,VT表示。r 代表导弹和目标之间的相对距离,q 代表视线角,φM,φT分别代表导弹和目标的航迹角,aM,aT表示法向加速度。

图1 弹目相对运动关系Fig.1 The relative motion relation between missiles and targets
制导系统的运动学方程可描述为:
对式(2)关于时间t 求导,可得:
终端攻击角θ 定义为导弹拦截目标时VM,VT之间的夹角,qf为终端视线角,φTf为目标终端航迹角,则攻击角θ 与视线角qf一一对应,关系表达式如下:
因此,通常将攻击角约束问题转化为考虑LOS角约束问题[11]。
假设qd是期望的终端LOS 角,定义LOS 角误差为x1=q-qd,LOS 角速率为x2=q˙。根据式(5)可得
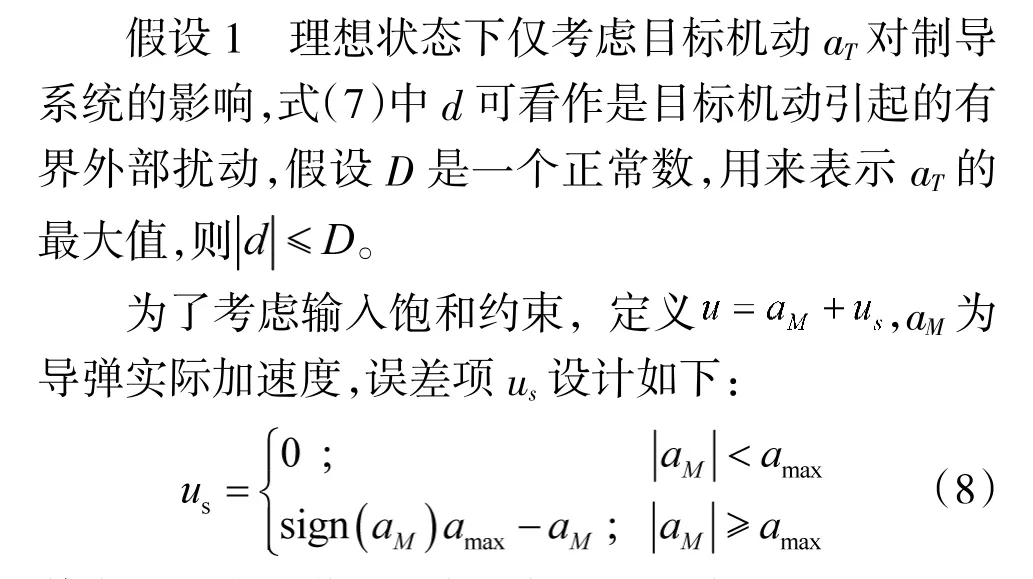
其中,amax为导弹的最大过载。通过式(8)可以看出,控制输入u 不会超过导弹的最大过载。
1.2 理论知识
定义1[6]考虑如下非线性系统:

注1 由以上定义及引理可看出,固定时间稳定实际上是一种特殊的有限时间稳定,收敛时间上界Tmax与系统的初始状态无关,可通过设计参数提前给定。
2 制导律设计
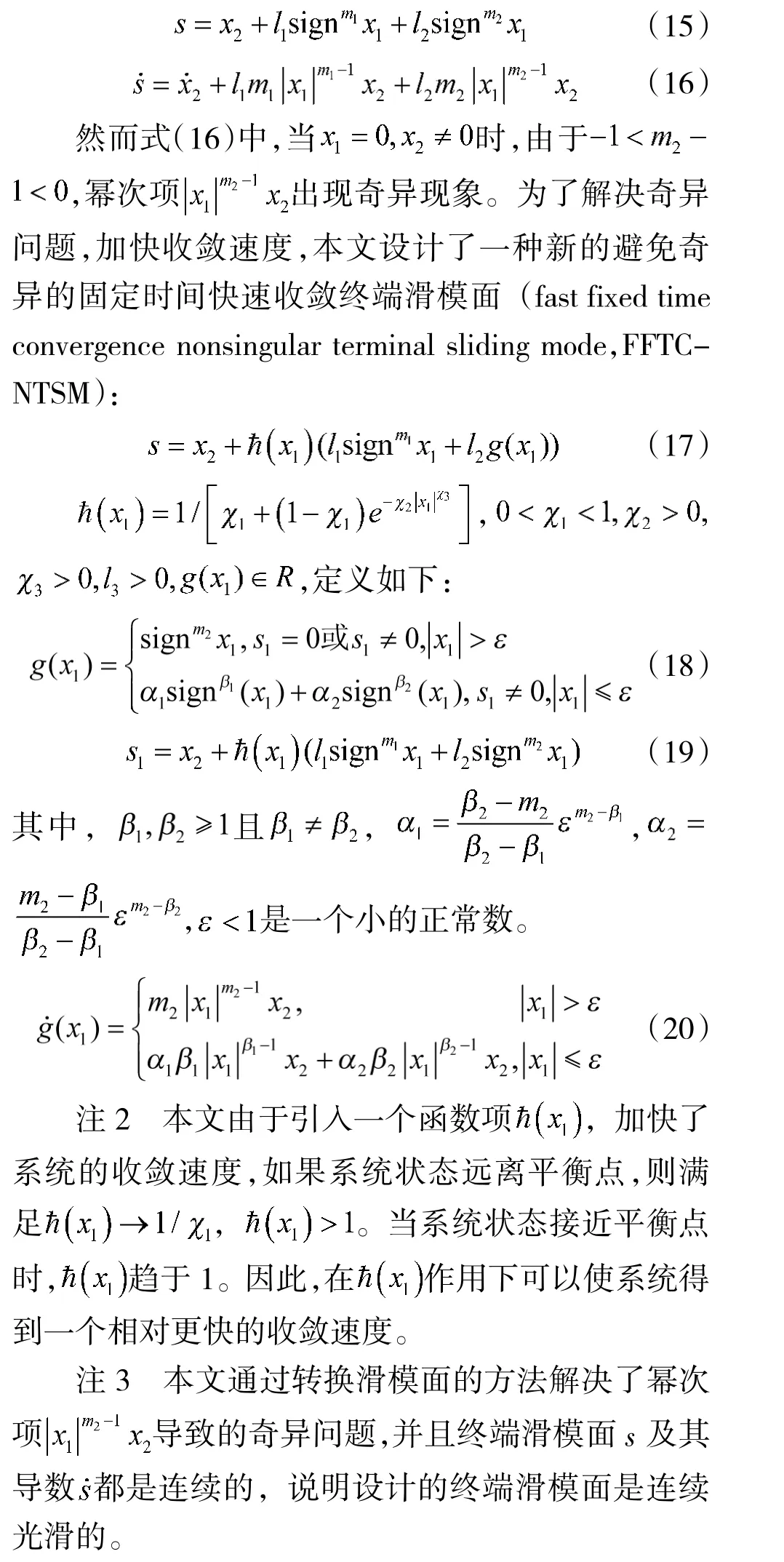
2.1 构造非奇异固定时间快速收敛终端滑模面
考虑制导系统(7),文献[14]给出了一种传统的固定时间终端滑模面(conventional fixed time convergence terminal sliding mode,CFTCTSM)设计方法:
2.2 制导律设计及稳定性证明
定理1 对于制导系统(7),采用滑模面(17),如果制导指令aM设计为

注4 由于固定时间制导律的设计中使用符号函数来对干扰上界进行补偿,所以系统存在抖振问题,可以利用饱和函数代替符号函数来削弱抖振,设计如下:
其中,ε0是一个很小的正常数。
3 仿真分析
为了验证所提出的固定时间快速收敛制导律的有效性,本章采用如下方式进行仿真分析。
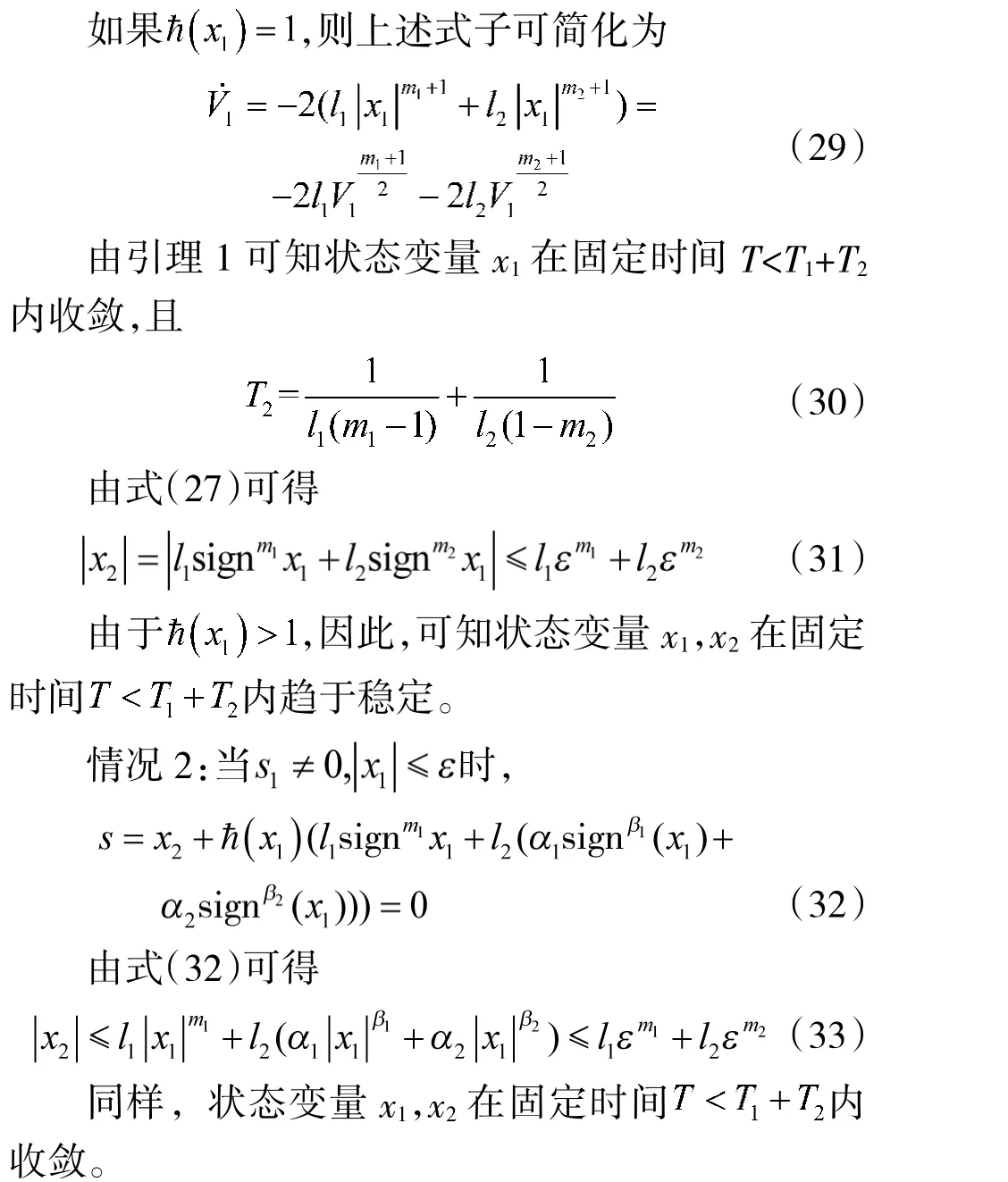
假设导弹和目标的初始弹目距离r0=10 km,初始LOS 角q0=π/6,航迹角φM0=π/4,φT0=5π/6,导弹和目标的速度VM=500 m/s,VT=250 m/s,目标的加速度aT=10cos(0.3t),重力加速度g=9.8 m/s2,导弹的最大过载为25 g。制导律中参数设定为l1=0.8,l1=0.2,m1=1.6,m2=0.6,l3=0.5,l4=0.3,m3=1.28,m4=0.5,由定理1 得T1=7.280 5 s,T2=14.583 3 s,T=21.863 8 s。
注5 参数的选择直接影响收敛时间上界T 的大小,由于设定的收敛时间是任意初始条件下的收敛时间上界,因此,往往为了保证固定时间收敛,这个上界设定的比较大,而实际收敛时间要比它小。为了使设计的收敛时间上界T 更合理,通常会根据导弹机动能力来调整参数的大小。
3.1 以期望视线角拦截目标
图2 弹目相对距离及飞行轨迹Fig.2 The relative distances and flight trajectories between missiles and targets

图3 滑模面及导弹加速度变化曲线Fig.3 Variation curves of sliding mode surface and the acceleration of missiles
图4 视线角及视线角速率变化曲线Fig.4 Variation curves of LOS angles and LOS angle rates
3.2 与其他的固定时间收敛制导律对比
若采用形如式(15)的固定时间终端滑模面,则制导律形式如下:

表1 不同制导律下的脱靶量与拦截时间Table 1 Miss distance and interception time under different guidance laws
图5 弹目相对距离及飞行轨迹Fig.5 The relative distances and flight trajectories between missiles and targets
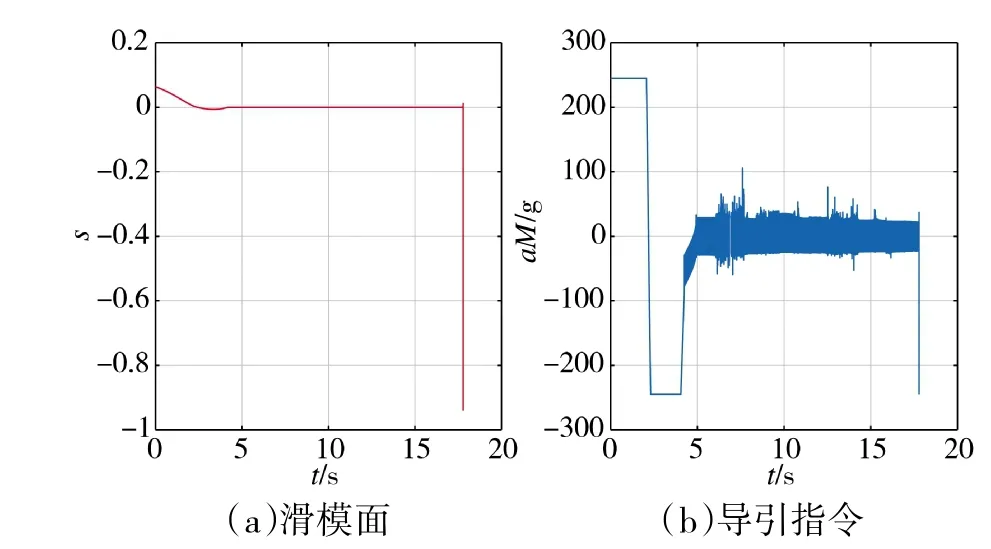
图6 滑模面及导弹加速度变化曲线Fig.6 Variation curves of sliding mode surface and the acceleration of missiles

图7 视线角及视线角速率变化曲线Fig.7 Variation curves of LOS angles and LOS angle rates
4 结论
本文将攻击角约束、输入饱和约束考虑到制导律的设计中,从而保证了所设计的制导律在满足加速度最大过载约束的同时以期望的角度拦截目标。由于引入了多幂次形式的非奇异快速终端滑模面,使得导弹系统能在给定的固定时间内收敛到平衡点,解决了传统终端滑模控制存在的奇异性、收敛速度慢的问题。进一步,在制导律的设计中,通过饱和函数代替符号函数,有效地削弱了控制输入的抖振。通过仿真验证,设计的非奇异快速固定时间收敛制导律,保证了LOS 角和LOS 角速率均在设定的固定时间内快速收敛。由于本文只考虑了平面模型的制导问题,针对带有约束的三维空间的制导问题,将是未来的研究方向。
