基于MPC 方法无人机避障路径规划研究*
2023-05-19李继广董彦非刘天栋樊佳乐
李继广,董彦非,刘天栋,樊佳乐
(西安航空学院飞行器学院,西安 710077)
0 引言
随着技术的成熟,无人机成为各领域常用的设备之一[1-2]。随着任务的不断扩展,无人机的使用环境也越来越复杂,面临的威胁也越来越多[3-4]。在工程上,无人机依靠起飞前规划好的航路飞行,缺少机上飞行员对突发威胁进行处理[5]。面对复杂的、不可预知的飞行环境,有效的自主障碍规避能力对提高飞行安全十分必要。
面对未知的突发威胁,国内外进行了大量的研究,如势场法[6-8]、几何法[9-11]等。然而,这些方法均为集中式算法,适用于固定障碍物,对分布式或动态障碍物缺乏应对能力[12]。同时对于无人机的动力学约束问题这些算法也无能为力。
模型预测控制(MPC)方法可充分考虑各种变量的约束,基于滚动优化思想获得的控制输入具有实时分布式控制的优点,因此,该方法在无人机避碰问题中得到广泛应用[13-14]。文献[15]提出了一种非线性MPC 方法来解决无人机间的碰撞问题。针对无人机飞行过程中避障问题,文献[16]提出了一种基于模型预测控制的无人机避障路径规划方法。文献[17]提出了一种NMPC 算法用于解决碰撞规避问题。但是,这些MPC 的策略设计较简单,规避障碍指标较单一,在工程应用上存在诸多实际问题。
针对无人机飞行过程中机动障碍物的避障问题,本文提出了一种MPC 避障路径规划方法,构造基于状态空间的障碍物预测模型、一阶指数变化和动态避障的参考轨迹生成方法,并提出了能力-时间组合最优为目标的滚动优化模型,从而达到在运动障碍物作用下,无人机运动轨迹安全、平滑的动态规划。
1 基于MPC 方法的无人机运动避障策略
MPC 方法是一种在线的、实时优化控制策略。该方法的基本思想是根据有限时域内历史信息为输入,利用被控对象的预测信息,通过性能指标作为约束条件以及合理的优化策略,对参考路径进行滚动优化的过程。MPC 优化不是一个不变的全局优化指标,而是采用有限时域的滚动优化策略,其优化性能指标只涉及从当前时刻到将来有限时刻。同时,MPC 方法通过当前的信息,替代相对“久远”的过去信息,实现了信息的滚动更新,从而使得优化过程反复在线进行。该滚动优化过程能够有效地克服系统优化模型的非线性、时变性、建模误差等因素的影响,具有更好的鲁棒性和工程应用价值。
就无人机规避运动障碍路径规划问题而言,MPC 方法需要解决预测模型、滚动优化和参考轨迹3 个问题。该过程如图1 所示。
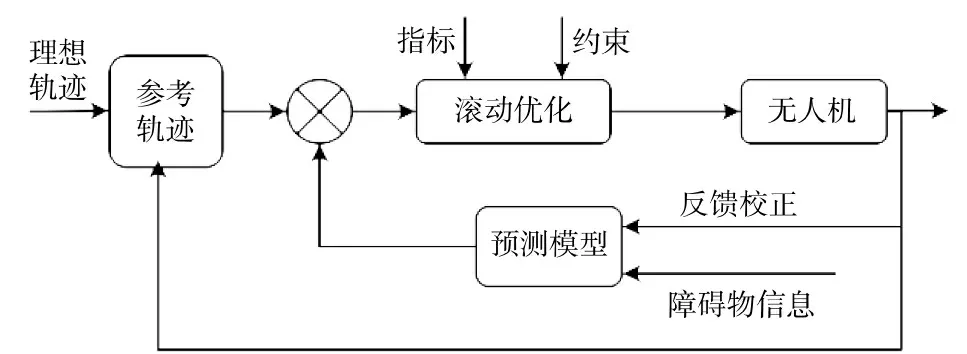
图1 MPC 无人机运动避障路径规划结构Fig.1 MPC UAV motion obstacle avoidance route planning structure
2 预测模型
2.1 障碍物运动状态方程
将障碍物当作质点,器运动方程可表示为;
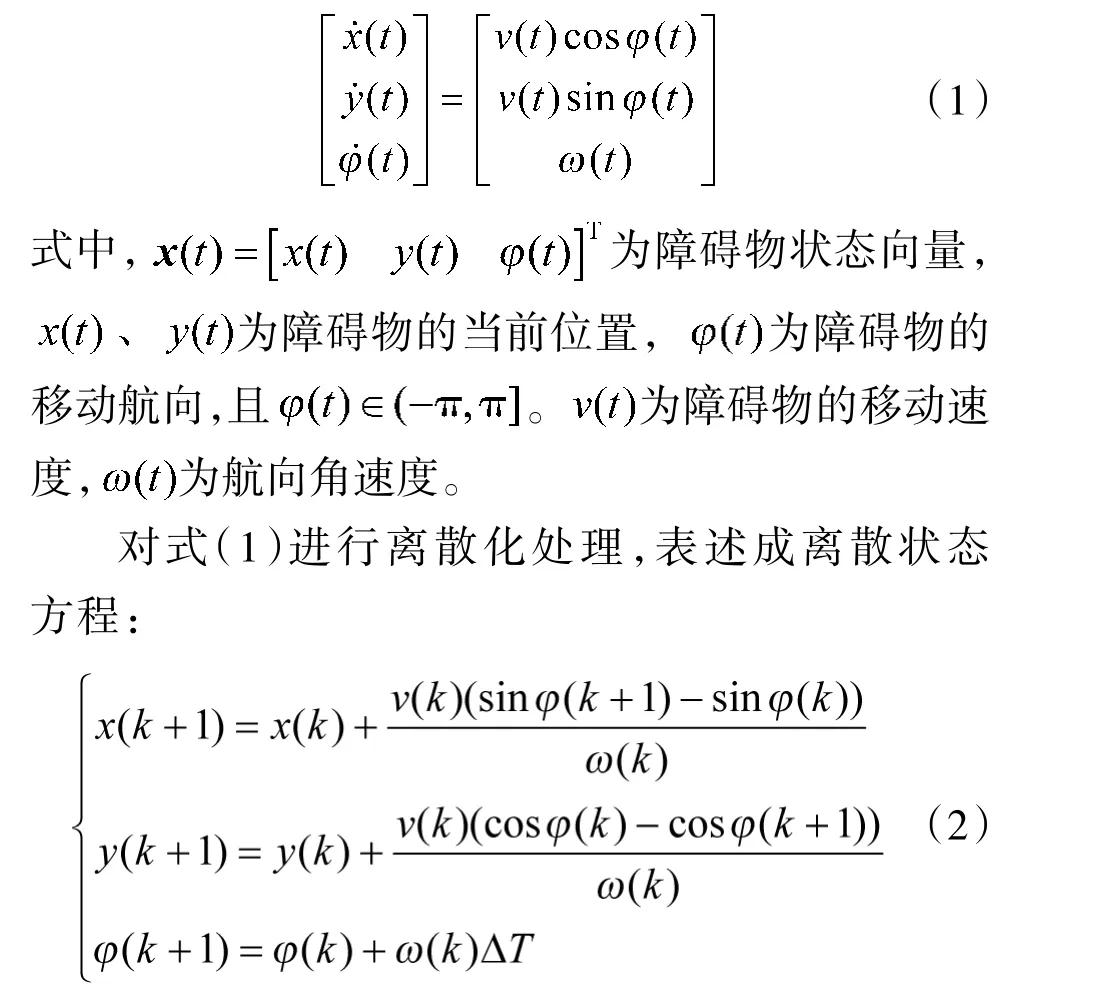
式中,ΔT 为采样时间。
将式(2)表示成状态空间形式:
式中,
2.2 障碍物运动预测
若系统的控制时域为Nc,预测时域为N,且Nc≤N,在不考虑无人机探测装置的测量噪声的情况下,可通过如下迭代方式预测障碍物的轨迹。由式(3)可得:



由式(6)、式(7)可得,障碍物运动预测方程为:
上述预测方程可写成如下形式:
3 参考路径的生成
3.1 参考路径生成方程

3.2 障碍判断
在参考航路生成时,除了上述平缓飞行的要求之外,还应极力避免无人机和障碍物发生碰撞。为达到该目的,路径生成时还要考虑障碍判断和障碍规避的问题。这里首先进行障碍判断方法介绍。障碍判断模型如图2 所示。
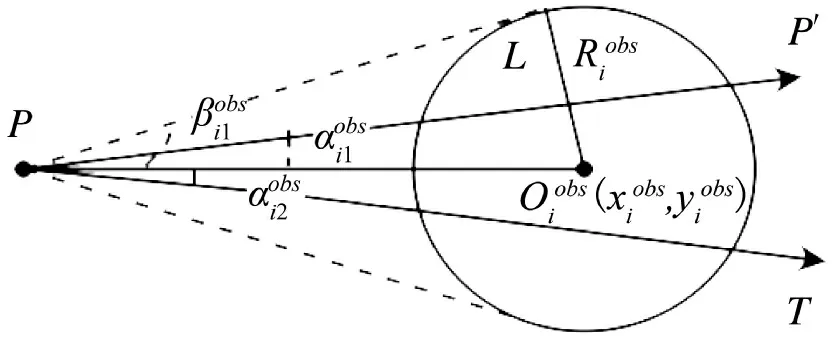
图2 障碍判断示意图Fig.2 Schematic diagram of obstacle judgment


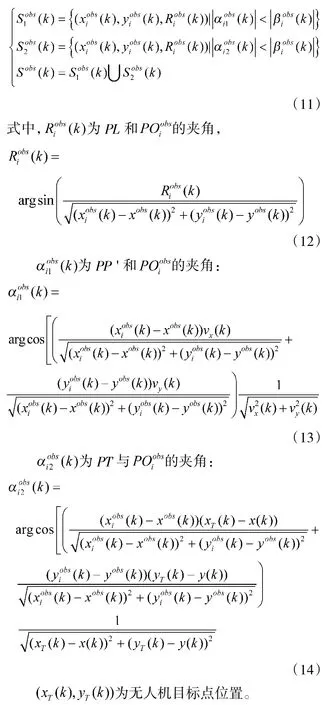
影响无人机正常飞行的障碍物为任何部位处于无人机与目标点的连线,以及无人机速度方向上的障碍物。这里把所有可能影响无人机正常飞行的障碍物称为障碍物集合。障碍物集合可表示为:
3.3 最小避障距离
当无人机以性能允许的最大角速度进行转弯规避障碍物,飞行轨迹刚好与障碍圆相切时,此时相切点与障碍物中心距离为最小避障距离。
在实际应用中,该最小避障距离应充分考虑无人机、障碍物间的运动关系,以及无人机最大转弯角速度的约束,通过实时迭代的方式确定。
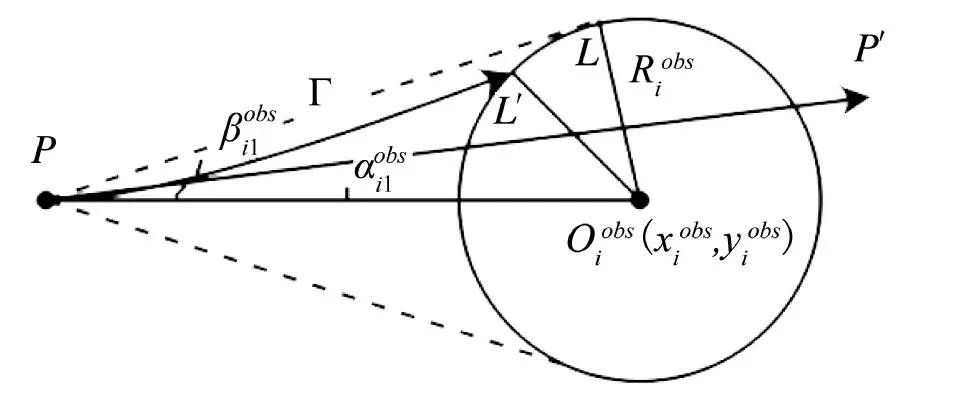
图3 最小避障距离示意图Fig.3 Schematic diagram of minimum obstacle avoidance distances
3.4 参考路径生成步骤
综合以上各小节内容,无人机规避障碍物参考路径生成步骤如图4 所示。
4 滚动优化
滚动优化是在每一采样时间间隔这一有限时域内进行优化求解,从而得到系统当前时刻最优控制序列的优化问题。滚动优化是实现整个在线避障控制系统闭环控制的重要步骤,是模型预测控制的核心。无人机避障在线滚动优化求解过程如下页图5 所示。

图5 无人机避障在线滚动优化求解过程Fig.5 Online rolling optimization solution process of UAV obstacle avoidance
该在线滚动优化问题以能力- 时间组合为优化指标,则无人机避障控制优化指标为:
式中:
约束条件包括控制量约束和避障约束。其中控制量约束为:
式中,dm为无人机与障碍物的间隔安全裕度。
综上所述,无人机避障路径规划滚动优化控制模型为:
5 仿真验证
5.1 二维平面避障仿真
为了验证本文方法有效性,进行如下仿真验证。对动态障碍物运动轨迹的预测是无人机进行避障路径规划的基础。这里首先验证障碍物轨迹预测算法,仿真效果如图6、图7 所示。

图6 障碍物轨迹预测Fig.6 Obstacle trajectory prediction
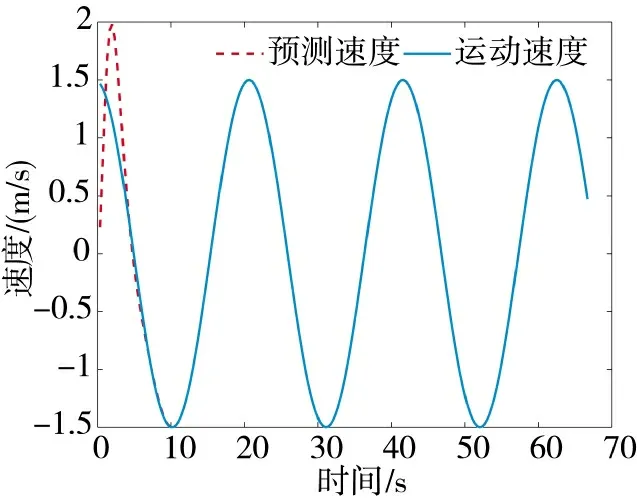
图7 障碍物速度预测Fig.7 Obstacle speed prediction
从图6、图7 仿真结果可知,本文所提出的轨迹预测方法可以快速、精确地预测障碍物的运动轨迹和运动速度,为无人机和障碍物的在线实时路径规划奠定了基础。
在障碍物轨迹精确预测的基础上,进行无人机进行避障路径规划的仿真。仿真初始参数设置如下:目标点位置为[7 000 m,10 000 m],初始控制量u0=[50 m/s,45°],无人机角速度约束为[-30°,30°],角加速度范围为[-10°,10°];障碍物半径及安全余量为500 m,仿真结果如图8 所示。

图8无人机避障路径规划Fig.8 Obstacle avoidance route planning of UAV
从仿真结果可知,无人机精确地规避了路径上的各个障碍物,规划出了一条安全、平滑的运动轨迹,并成功到达了目标点。仿真结果证明了本文所示方法是有效的。
5.2 三维空间避障仿真
接下来进行仿真验证。仿真条件如下:无人机初始位置为(0 km,0 km,20 m),目标位置为(150 km,150 km,150 m);初始控制量u0=[50 m/s,45°],无人机角速度约束为[-30°,30°],角加速度范围为[-10°,10°];在通往目标的路径上,分别用5 个球形障碍物,无人机和障碍物安全余量为500 m。仿真结果如图9 所示。

图9 无人机三维避障路径规划Fig.9 Obstacle avoidance 3D route planning of UAV
从仿真结果可知,在三维空间中,无人机依然规避了路径上的各个障碍物,规划出了一条安全、平滑的运动轨迹,并成功到达了目标点。仿真结果证明了本文所示方法是有效的。
6 结论
针对无人机飞行过程中机动障碍物的避障问题,本文提出了一种MPC 避障路径规划方法。在该方法中,构造基于状态空间的障碍物预测模型,一阶指数变化和动态避障的参考轨迹生成方法,并提出了能力时间组合最优为目标的滚动优化模型,从而达到在运动障碍物作用下,无人机运动轨迹安全、平滑的动态规划。仿真结果表明,本文所提方法可有效解决无人机飞行路径的避障问题。
