AUV 智能集群协同任务研究进展
2023-05-19赵振轶冯豪博
胡 桥 ,赵振轶 ,冯豪博 ,姜 川
(1.西安交通大学 机械工程学院,陕西 西安,710049;2.西安交通大学 机械制造系统工程国家重点实验室,陕西 西安,710049;3.西安交通大学 陕西省智能机器人重点实验室,陕西 西安,710049)
0 引言
自然界中存在着大量的群体自组织行为,其中最为典型的包括蚁群、鸟群和鱼群等。他们中一些功能简单的个体在通过局部关联组成一个整体之后,涌现出令人印象深刻的整体智能行为,其可以完成的任务复杂程度远超个体智能的简单加和。因此,自然界的群体智能行为吸引了人们的关注,而以智能机器人为代表组成的多智能体系统,为人们研究自然界的群体智能行为涌现提供了研究平台。
随着机器人制造和人工智能技术的飞速发展,机器人可以完成越来越多的陆地工程任务,例如路径规划、自主巡航和群体协作等。相比之下,水下航行器则面临着更加极端复杂的环境,如复杂的水流运动与海底结构、高压环境、低能见度和环境对仪器设备的干扰等,发展水下航行器的难度远高于陆地机器人,一方面,航行器无法凭借简单的探测工具获取周围水环境信息,另一方面,对于航行器的运动控制也会受到水流的巨大干扰。这些都是海洋探索与开发过程中亟待解决的问题。
多智能体围捕任务作为体现多智能体系统智能化程度的非常具有代表性的任务,具有重要的研究价值。围捕任务可以为实现捕获、搜索、拦截、队形转换和协作搬运等提供支撑,可以广泛应用于反恐、安保、军事等领域,具有重要意义。围捕任务中所涉及的研究内容包括集群数学模型、个体运动方式、通信协议、智能决策和任务评价指标等,由于其涉及方面广、复杂程度高、对多智能体协作要求严格等特点,使其成为多智能体协作的重点研究方向。
路径规划作为水下智能集群进行作业任务中的关键一环,在提升航行性能、保障航行安全、降低航行能耗和提升作业效率等方面起到重要作用[1-2]。与单智能体系统相比,水下智能集群航路的规划更为复杂,不仅需要考虑海洋环境因素,还需要对航行器间航行路径进行统筹协调,对路径规划系统的实时性、系统性和鲁棒性提出了更高要求[3],使其得到越来越多学者的关注。文中以此为主题,综述国内外的多智能体集群协同任务的研究现状,并重点介绍笔者团队在此领域的研究成果。
1 国内外智能集群多种协同任务及相关技术研究现状
近年来,围绕智能集群的各类任务应用及涌现的一些问题,国内外学者进行了广泛研究并取得了许多具有重要意义的成果。文中梳理了其中一些关于智能集群任务类型及其涉及关键技术的相关工作,并从集群围捕、路径规划和编队控制三方面来进行阐述。
1.1 集群围捕任务
以智能机器人[4-7]为代表的智能个体集群组成的多智能体系统是人们研究自然界智能群体行为的重要研究平台。其中,多智能体协同围捕任务则是反映多智能体系统智能化程度的代表性任务之一。协作围捕任务技术可以为其他任务提供支持,如搜索[8]、拦截、队形转换[9]和合作运输[10],可广泛应用于反恐、安全和军事等领域。协同围捕任务涉及的关键技术包括群体数学建模、个体运动模式、个体间信息交互方式、智能决策过程和任务评价指标等。所涉及的智能机器人集群技术是多样而复杂的。因此,研究人员经常以协同围捕任务[11]的完成情况来评价智能集群系统的性能。
目前已经有许多研究者对水下协同围捕问题中的一些关键技术进行了详细的研究并取得了卓越的成果。自主水下航行器(autonomous undersea vehicle,AUV)作为智能水下航行器的代表平台之一,因其具有探测、通信、智能决策和控制等功能而在水下作业中得到广泛应用。在多AUV 协同围捕问题中,多AUV 系统工作在未知的水下环境中,对水下AUV 集群的探测、通信和控制提出了新的挑战。由于水下环境的复杂性,AUV 的传感范围非常有限,无法获得准确的全局信息,但是合作围捕必须考虑避障行为。Huang 等[12]对AUV的围捕问题进行了建模,采用构造信息完整地图的方法完成了AUV 的围捕,对水下围捕策略进行了仿真验证。然而,该策略需要太多的先验信息,在实际中很难获得。Cao[13]和Zhu[14]等利用仿生神经网络(bionic neural network,BNN)模型研究了多AUV 围捕问题,提出了一种基于距离的协商方法来分配围捕任务。分别在二维和三维环境下进行了仿真研究。该算法能够较快地捕获目标,但需要全局地图信息进行建模,同样实际应用有限。Ni 等[15]提出了一种基于双向协商策略的动态联盟方法和一种基于改进遗传算法的运动方向分配方法,围捕AUV 在行动前会进行协商,可以有效提高围捕AUV 的航行效率。Cao 等[16]采用协商的方法为每个AUV 分配合适的理想围捕点。围捕AUV 可以按预期路径点包围运动目标,但在该研究中,围捕团队是通过提前协商组成的,由于水下通信的困难,各AUV 之间交互的信息量非常有限,无法进行大量的交流,因此,这种方法很难在实际中应用。Cai 等[17]采用生成对抗网络(generative adversarial networks,GAN)迭代训练生成适合水下三维和干扰环境的控制律,实现对非合作目标的成功猎杀。Liang 等[18]提出了一种基于免疫机制的行为驱动协作控制方法,开发了具有自组织和容错特性的混合非中心拓扑结构。但是,以上2 位学者的研究均是基于简单环境,没有障碍物等复杂情况,通过训练特定环境中的控制关系得到的控制律作为生成模型的输入,无法应用于其他更广泛的情况。Chen 等[19]针对具有不同运动能力的AUV,结合了Glasius 启发式神经网络(Glasius bio-inspired neural network,GBNN)模型和置信函数,在动态水下环境中利用非均匀多捕猎AUV 智能追捕逃逸者,其构建的水下三维环境及多AUV 运动过程如图1 所示。但是,水下环境的复杂性与信息获取的困难导致了构建通用的神经网络模型十分困难,因此这类方法难以在复杂多变的水下实际环境中应用。

图1 动态水下环境中非均匀多AUV 集群围捕示意图Fig.1 Diagram of inhomogeneous multiple AUVs cooperative hunting in dynamic underwater environment
综上所述,一方面由于传统电磁波在水下环境中的快速衰减,水下航行器之间通信及定位相对困难;另一方面由于定位与状态反馈很难精确的获得,这些因素对水下多智能体集群系统的稳定性造成了很大的挑战,对实现集群任务造成了很大干扰。因此,水下智能集群系统从个体和系统模型到集群算法方面都具有其自身特殊性。目前所实现的功能仍然较为初级,系统的稳定性不够,且智能化、自主化程度不高,这方面的研究仍处于探索阶段,大量理论与工程问题亟待解决。
1.2 路径规划任务
路径规划问题可以描述为在一定区域的海域环境中,在对海域空间建模的基础上,通过路径搜索算法寻找一条或多条由起始点至目标点的评价单目标最优或多目标最优(例如航行时间最短[20]、路径长度最短[21]、航行能耗最小[22]、安全性最好等)的无碰撞路径。相比于地面移动机器人和空中飞行器,水下智能集群的路径规划问题更为复杂,面临来自海底地形、海洋生物及海洋涡流等多方面因素的干扰[23-24]。
路径规划可分为离线路径规划(静态路径规划)和在线路径规划(动态路径规划)两类。离线路径规划指根据全局先验信息提前搜寻一条或多条由起始点至目标点的可行路径,侧重于优化航行路径的某些指标以达到缩减航行时间、节约航行能耗等目的,其规划结果精度取决于先验环境信息的准确度。离线路径规划对规划方法的实时性要求不高,但由于不能对变化的环境因素进行航路修正,因此难以在复杂多变的海洋环境中保证航线路径的时效性和安全性。动态路径规划指基于全局先验信息和传感器实时获取的环境信息实时规划并更新路径,侧重于提高水下航行器对动态环境障碍等难以提前预知的干扰因素的应对能力、在航行轨迹偏离预定路径情形时的主动修正能力,因而对路径规划算法的实时性要求很高而对最优性要求较低。目前,主流的路径规划算法可分为传统方法、基于栅格地图的图搜索方法、基于随机采样的图优化方法以及智能仿生方法四大类,如图2 所示。
图2 路径规划算法Fig.2 Path planning algorithms
可视图法和势场法是应用最为广泛的2 种传统路径规划方法。可视图法将障碍物用外接多边形表示,将起始点、目标点与障碍多边形顶点三者之间进行两两连线,并摒弃与障碍多边形相交的连线,从而得到表示可行路线的有向图。然后通过Dijskra 算法[25]、Lee 算法[26]等寻优算法搜索出从起始点至目标点的多段可行路线依次首尾相接的最短路径。但此方法的路径规划效率随着障碍数变多和形状变复杂而显著降低,在解决实际路径规划问题时其实时性难以满足需求。势场法是一种虚拟力法,其势场一般由目标点产生的引力场和障碍物产生的斥力场叠加而成,通过被控对象在势场中所受虚拟力的方向和大小确定局部路径,能够规划出非常平滑的路径[27-28]。虽然该方法具有求解效率高、路径质量好的优点,但存在局部极值较多、参数调节困难、全局最优性差等不足。
基于栅格地图的图搜索方法通过将地图离散化为由可行栅格和障碍栅格组成的栅格地图,并应用A*算法、LPA *算法、D*算法等搜索算法规划从起始点至目标点由一系列相接栅格组成的最优路径。A*算法自1968 年首次被提出以来一直是应用最为广泛的全局路径规划算法[29],属于启发式全局算法,具有搜索效率高、建模简单等优点,但存在易于陷入局部最优、搜索性能对参数敏感等缺陷。LPA*算法是一种改进A*算法,能够处理动态环境中的起始点和目标点均固定情形下的最短路径规划问题[30]。D* Lite 算法是在A*算法的基础上发展而来的增量式路径搜索算法,Bing 等[31]采用D* Lite 算法解决水下航行器在动态变化三维水下环境的路径规划问题,有效弥补了A*算法及LPA*算法在变化环境中实时搜索效率低的问题。蒋林等[32]针对A*类算法拐点多、递归计算复杂的问题,提出了一种基于射线模型的全局路径规划算法,所规划路径具有更好的平滑性、灵活性和稳定性。针对A*算法仅能求解不包含动力学、运动学等约束下路径规划问题的缺陷,Dolgov 等[33]提出了Hybrid A*算法,通过满足约束要求的曲线段生成节点或求解节点与相邻节点的连接方式,在此基础上应用A*方法探索状态空间。
基于随机采样的图优化方法主要分为快速扩展随机树法(rapidly-exploring random tree,RRT)和概率路图法(probabilistic road map,PRM)两大类[34-35],而RRT*算法则是从RRT 算法发展而来的最优路径规划方法[36],由于具有全局渐进最优的特点而逐渐取代RRT 和PRM 成为应用最为广泛的基于随机采样的路径规划算法,如图3 所示。由于RRT*求解效率与求解质量成负相关关系,因此提升RRT*算法的路径规划性能一直以来都是研究热点。双向搜索方式通过从起始点和目标点分别构建随机搜索树,可以有效减少迭代次数从而降低规划时耗[37]。Chen[38]等将回旋曲线应用于构造树枝平滑的随机搜索树,有效地提高了规划路径的可执行性,但存在寻优能力弱以及计算成本高等缺陷。Chandler 等[39]针对动态目标时路径重规划问题,通过对原有随机搜索树进行重布线修正减少重规划开销,提出了效率更高的在线RRT*和FMT*算法。
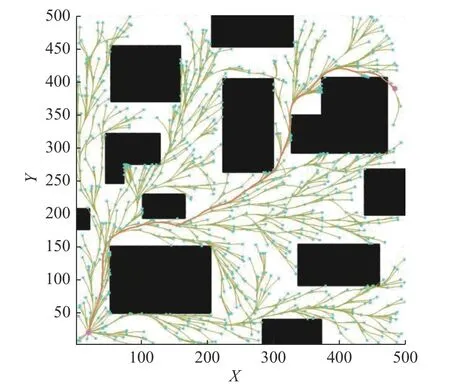
图3 RRT*路径规划算法示意图Fig.3 Path planning based on RRT*
常用于路径规划的智能仿生算法包括遗传算法、粒子群优化算法两类。遗传算法是由Holland[40]于1975 年提出的基于自然界优胜略汰思想的一种随机搜索优化算法,具有收敛速度快、建模简单、普适性强等优点,被广泛应用于解决水下航行器的全局路径规划问题。张美燕等[41]将水下航行器航行集群的协作探测路径规划问题转化为多旅行商问题,以能耗及能耗均衡为约束条件并采用遗传算法进行求解,有效提高了水下航行器集群的巡航速度及作业时长,但该方法并没有对环境障碍进行考虑。Kapanoglu 等[42]将路径模板匹配融入遗传算法中实现了集群的合作全覆盖路径规划,能有效减少区域覆盖时耗,但该方法由于路径模板局限性而难以适用于动态环境。粒子群优化算法是由Eberhart 等[43]提出的模拟鸟类种群捕食行为的一种启发式算法,能在有限的计算时间内保证最优性。Guo 等[44]针对水下航行器在时变海流环境下的全局路径规划问题,通过预估海流速度矢量和建立AUV 运动学方程改进粒子群优化算法以提高水下航行器的自主路径规划能力。邹佳运[45]针对水下滑翔机集群对区域的探测路径规划问题,提出了一种基于粒子群算法和序贯思想的覆盖路径规划算法,实现了以较小的计算成本规划较优区域搜索方案。王浩亮等[46]提出了基于量子行为的自适应粒子群优化方法,在此基础上结合基于人工势场法的局部路径规划方法提出了一种双层协调路径规划结构,实现了水下滑翔机集群在复杂海洋环境中具备灵活避碰能力的时间最优路径规划,但该方法没有考虑海洋生物等动态障碍,在环境多变场景中规划效率仍难以满足实际需求。
总体而言,目前水下智能集群路径规划技术围绕着提升单智能体系统对复杂海洋环境的应变能力、降低路径规划的实时计算成本、满足水下智能集群在不同工况下航路需求3 个方面,朝着高实时性、高动态避障性能、多指标优化方向发展。但水下智能集群的路径规划技术由于其复杂性仍未在应用层面取得重大进展,制约了其在无人集群协同作战、海洋应急搜救等领域的广泛应用以及相关海洋技术领域研究的发展。
1.3 编队控制任务
编队控制是目前水下无人集群技术的研究热点之一,是提升水下无人集群现代化、智能化和信息化的重要途径之一。水下智能集群通过一定的编队控制方法进行运动协调,或组建稳定的编队队形,在海洋环境考察、海洋物资运输、水下集群作战等领域都具有单水下作业平台所无法比拟的优越性,可以为实现高性能路径规划、高质量实时避障、高效率作业水平提供支持。但相对而言,由于集群规模的增大,水下智能集群的编队队形协调控制也变得更为复杂,在稳定性、实时性、系统性和鲁棒性等方面对编队控制算法提出了更高的要求。现阶段,常用的编队控制方法主要有领航者-跟随者法、虚拟结构法和行为法3 种,此外还有为了提高编队控制鲁棒性所提出的人工势场法和图论预测法。其中,领航者-跟随者法和虚拟结构法通常情况下还需搭配额外的轨迹跟踪方法以完成对集群的航路控制。
领航者-跟随者编队控制方法是由Wang[47]于1991 年首次提出的一种主从式编队控制方法,其核心思想是由领航者进行路径规划,跟随者基于领航者位置和速度等信息根据约束条件计算位置误差与速度误差等信息以保持相应的运动状态,从而形成较为稳定的编队队形系统。其将无人集群系统的运动控制问题分解为领航者的路径规划问题和跟随者的跟踪运动问题,有效减小了无人集群编队控制的复杂程度和控制难度。但作为一种基于集中式控制的方法,其控制效果依托于领航者的航行情况、通信稳定性等因素,因此实际应用效果通常难以维持在预期水平。赖云晖等[48]基于领航者-跟随者策略和图论法,通过为领航者和跟随者应用不同的控制策略,实现了稳定的固定编队队形控制,但该方法仅适用于较为简单的环境且难以处理队形切换问题。Yan 等[49]针对编队控制中海洋流场干扰造成的定位精度降低问题,提出一种基于图论和虚拟领航者的编队控制方法,有效减少航行器间的通信量,增大编队队形的控制精度和稳定性。
虚拟结构编队控制方法是由Lewis[50]于1997年提出的一种分布式编队控制方法,其核心思想是将期望队形考虑为刚性虚拟结构,根据虚拟结构为每台水下航行器分配期望位置,水下航行器以期望位置为参考计算期望速度等控制信息,从而确定水下智能集群的运动路径。这种方式将水下智能集群的编队队形控制问题转化为水下航行器对参考点的追踪问题,具备较高的编队队形和运动轨迹控制精度,但由于缺乏队形变换灵活性因此难以适应复杂的海洋环境。Cervantes 等[51]针对三维环境下水下航行器的轨迹控制问题,结合微分器设计出一种基于混合结构的虚拟结构法控制器,以位置和航向角4 个参数作为控制量,以较低误差实现了水下航行器对虚拟参考点的跟踪轨迹控制。潘无为[52]采用虚拟结构法,以期望队形中心为虚拟结构中心,形成虚构结构队形以及虚拟结构质点,虚拟结构中心采用人工势场法实现避障,水下航行器跟踪虚拟结构质点实现队形控制,并通过仿真实验验证了该算法的可行性。
基于行为的编队控制方法根据化繁为简的思想将水下航行器集群的编队行为控制分解为一系列的子行为,通过控制水下航行器对子行为的有序执行实现对水下航行器集群整体行为的控制。在实际工程应用中,水下智能集群间共享事先预定义的基本行为集合,在作业过程中通过对基本行为的组合实现复杂行为,基于行为控制原则动态协调分配各水下航行器的行为和航迹实现水下航行器集群的协同控制,因此具备较高的灵活性、适应性和鲁棒性。Hacene 等[53]通过将集群编队行为分解成目标追踪、障碍避碰和互相避让等若干基本行为,基于领航者-跟随者策略实现集群系统在未知动态环境中的目标跟踪、实时避障和队形控制,但难以应用于障碍形状复杂的环境中。Kang 等[54]针对未知海洋环境中的水下智能集群编队控制问题,融合模糊逻辑控制提出了一种基于行为的编队控制方法,并通过仿真验证了该方法的可行性和鲁棒性。
综上所述,现有编队控制研究基本都以实现轨迹跟踪、队形控制等多种需求为切入点,在提升队形控制稳定性、保证协同避障安全性、减少通信负担等方面已经取得了大量成果,但现有方法仍难以同时对外界干扰、通信延迟、信道受限以及拓扑结构切换等因素进行考虑。此外,现有研究均以同构水下航行器集群系统作为被控对象,即所有水下航行器均具有相近的动力学特性、运动学特性和软硬件系统,但相比之下,功能不同的异构水下航行器组成的水下智能集群系统具有更广泛的应用前景。因此,在编队控制方面要实现更为普适实用的水下智能系统仍然面临许多挑战。
2 AUV 集群多任务关键技术
笔者团队在水下智能集群多任务领域也进行了大量研究。为对水下AUV 平台为代表的水下航行器集群进行研究,设计的全向移动AUV 实验平台如图4 所示。其中,水平和垂直螺旋桨推进器为AUV 提供了全向移动能力;控制和传感舱包括电场通信和视觉检测模块,使得AUV可以在其周围环境的一定范围内获取信息。
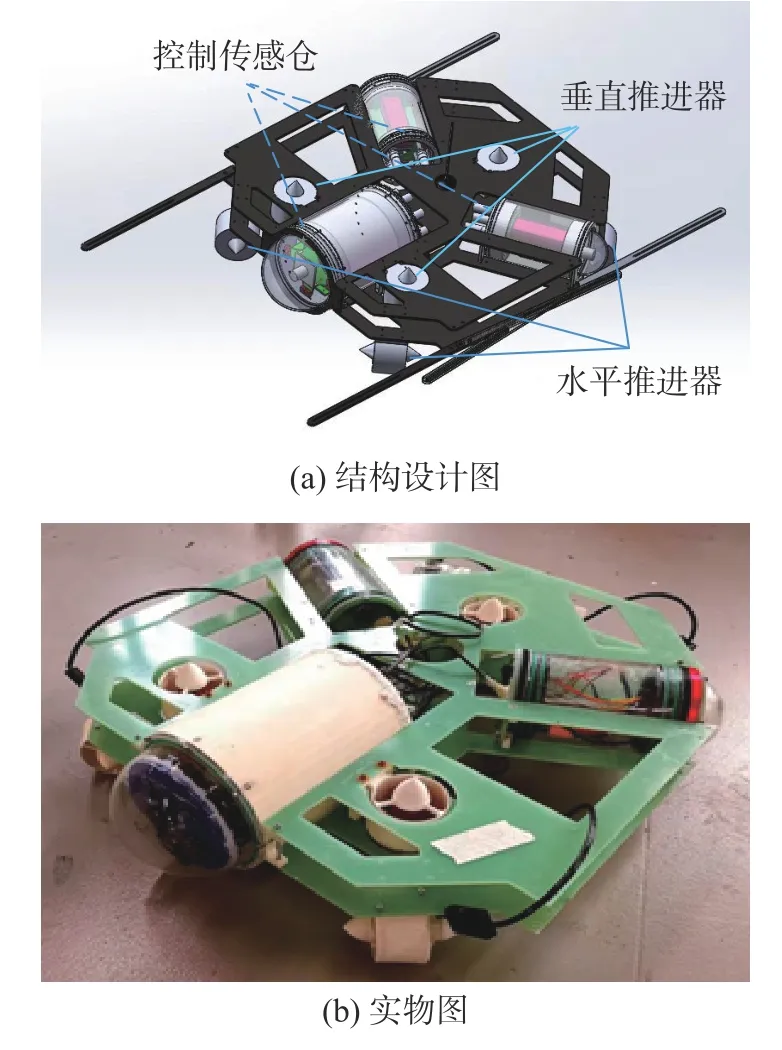
图4 全向移动AUV 实验平台Fig.4 An omnidirectional mobile AUV experimental platform
2.1 集群协同围捕技术
在水下环境中,由于多智能体之间的通信以及各自的定位都具有一定的困难,对水下多智能体集群系统的稳定性提出了挑战。现有研究在集群系统的稳定性、智能化和自主化方面仍处于探索与提高阶段。笔者团队主要针对多AUV 在有障碍的水下弱信息环境中的协同围捕任务展开研究。与深海环境相比,浅水环境有更多的障碍和其他干扰,由于在实际浅水区的大多数情况下,目标和围捕AUV 之间的二维平面距离变化远大于航行器的深度变化,因此考虑二维平面中的运动。协作围捕任务描述如下:在无界的二维空间中,存在一个由围捕AUV 和具有与围捕AUV 相同智力的对抗目标组成的对抗集群。每个围捕AUV 从初始位置开始,经过数个时间步长,当所有围捕AUV 到达智能对抗目标周围并形成包围队形时,围捕任务完成。
基于人工势场(artificial potential field,APF)的方法是AUV 局部任务路径规划问题的一种常用方法,该方法对围捕AUV 的通信和信息检测能力要求较低,并且具有计算复杂度低、实时性高的优点,已在理论研究和实践中被广泛应用。然而,传统基于APF 的方法在应用于多AUV 协同围捕任务时,缺乏合作友好邻居之间的区分,并且容易陷入局部最优,导致路径振荡,甚至无法到达预期区域。因此提出了一种基于改进的人工势场(HAPIAPF)方法的混合自适应偏好方法,以解决在有障碍的水下弱信息环境中多AUV 协同围捕问题。该方法考虑了水下协同围捕任务的实际约束,建立了包括水下静态和动态障碍物、AUV 传感交互距离限制、AUV 速度变化、目标对抗策略和其他影响因素在内的任务模型。在传统APF 方法中,目标对围捕AUV 的吸引力随着距离的减小线性降低并随着对目标的接近最终趋于零,这可能导致围捕AUV 最终只受到友邻个体之间排斥力的影响,不利于最终形成稳定的编队。为了解决这一问题,并在最后阶段使成群的围捕AUV 快速稳定地包围目标,提出了一种围捕偏好策略。定义目标引力函数为
式中:RT为围捕收敛距离参数;ρ(Xi,XT)为目标和第i个AUV 之间的欧式距离。在传统APF 方法中,当个体受到障碍物周围吸引力和排斥力的影响时,在AUV 移动的下一时刻,合力可能会发生或正或负的变化。因此,AUV 计划的路径可能出现反复震荡,导致能源浪费和时间消耗。为了解决这一问题,使多AUV 群快速稳定地通过障碍区域,提出了一种具有改进虚拟力的避障偏好策略。个体AUV 受到的友邻作用函数为
式中:n为围捕AUV 的数量;ρ(Xi,Xj)为第i个AUV 和感知范围内的第j个友邻个体之间的欧氏距离。假设共有m个障碍物或等效障碍物在第i个AUV 的感知距离内,障碍物的作用力函数为
最后,通过设计自适应权重控制单元,基于AUV 集群的状态来选择当前的最佳策略。通过仿真研究验证了所提出方法的有效性。部分仿真过程及评价指标如图5 和图6 所示。
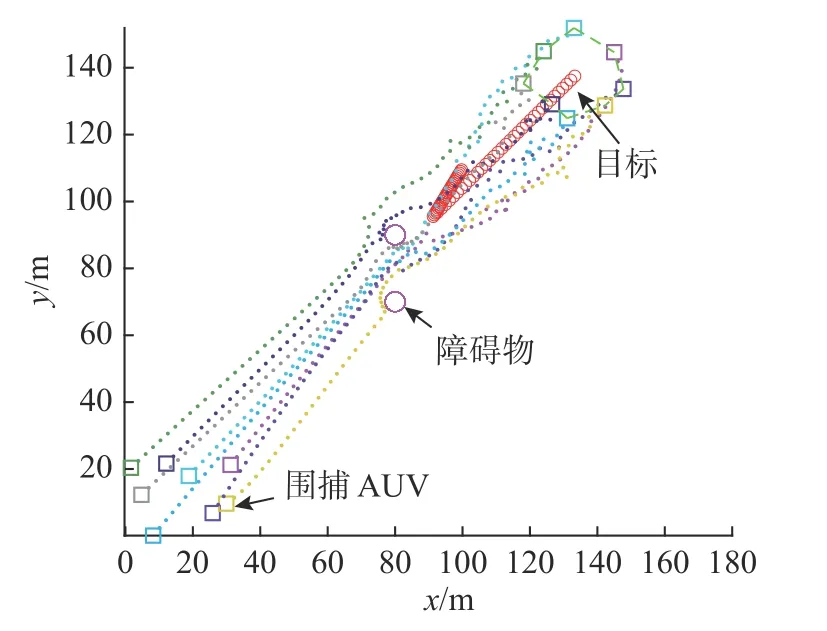
图5 静态环境中集群围捕过程轨迹图Fig.5 Cooperative hunting track in static obstacle environment

图6 评价指标Fig.6 Evaluation indexes
如图5 所示,在从位于原点附近的初始位置出发后围捕AUV 集群以平滑的回避路径穿过障碍物影响区域,并始终保持在安全距离以上,顺利通过受障碍物影响的区域,最终在目标周围形成了稳定且规则的环状队形,任务过程收敛。
以上工作经过与现有方法的对比分析[55],表明了所提出方法具有快速响应实时性强、避障路径平滑、最终队形稳定、动态环境适应性强的优点。未来将根据任务需求,进一步优化改进方法。
2.2 水下多路径规划技术
水下多路径规划是指为水下智能集群规划多条从起始位置到目标位置的互不重合的可行路径,是水下智能集群实现多编队协同航行、巡航及围捕的关键技术之一。相比于水下单路径规划,国内外学者对于水下多路径规划技术的研究相对较少。在这方面,笔者团队开展了基于遗传算法的最短航行时耗多路径规划相关研究[56-57]。
对于静态环境中的水下多路径规划,基于遗传算法引入精英族系策略,以平均路径长度最短且相似度低的解集为寻优目标进行迭代求解。考虑到相互重合的路径会导致水下智能集群在航行过程中存在相互避让问题并提高航行所需时耗,采用了基因相似度来评价解集中个体所代表路径的重合程度,从而引导解集个体朝着各局部极值迭代。同时为了避免早熟收敛现象,算法采用了基于三元锦标赛选择的复制算子、基于三元锦标赛选择的淘汰算子、基于局部最优的变异算子以及基于单点交叉法的交叉算子,进一步平衡了算法的全局搜索能力和局部寻优能力。该算法在水下智能集群独立航行和编队航行工况下均能规划出最优路径解集,如图7 和图8 所示。

图7 独立航行工况下多路径规划Fig.7 Multipath planning under independent navigation condition
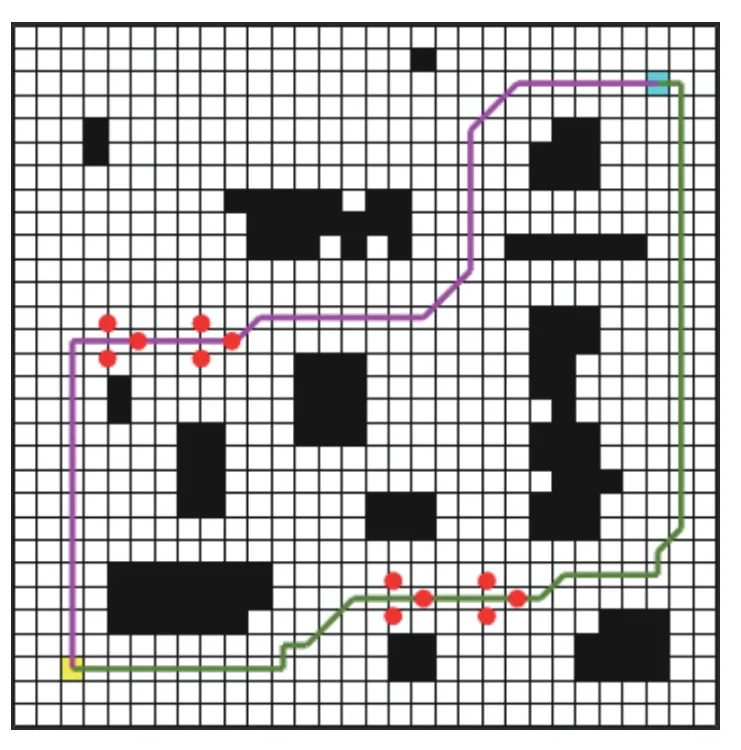
图8 编队航行工况下多路径规划Fig.8 Multipath planning under formation navigation condition
针对动态环境中的水下多路径规划,在实时性更好的A*算法的基础上,引入排斥因子构建综合代价函数,通过迭代思想和栅格优先度将用于规划单一最优路径的A*算法拓展为用于多路径规划的MA*算法。MA*算法的流程为:
1)将所有无障碍栅格的栅格优先度p值置为0,不可达栅格p值置为+∞。
2)清空open 表和close 表。
3)将水下无人集群的起始栅格放入open表中,g值置为0,f值置为0;将所有其余栅格的g值和f值置为+∞;将所有栅格的父节点置为0。
4)若open 表不为空,则取出open 表中f值最小的栅格n,否则判断路径规划失败。
5)对于n的所有邻接栅格nnext,将不在open表中且不在close 表中的栅格放入open 表中,将n作为nnext的父节点,并由式(4)~(6)更新其g值、f值;对已在open 表中的栅格nnext则由式(4)~(7)更新其g值、f值和父节点,即
6)若n不为目标栅格,则将n从open 表中移除,并放入close 表中,跳转至step4。
7)由g依次迭代获取父节点直至父节点为起始栅格,反推得到一条可行路径Ppath。
8)若可行路径数量少于所需路径数量,则按式(8)和(9)对所有可行栅格的p值进行更新;若部分可行路径受变换环境影响转为不可行路径,则删除该部分可行路径并对所有可行栅格的p值进行更新。
9)转至步骤2),进行下一轮迭代,即
式中:k为组成可行路径Ppath的所有栅格;Kp和Ka为可行路径间距调节参数;Kmap根据路径规划问题空间规模设为某一定值,一般取0.000 1~0.001,下标start 和goal 分别为起始栅格和目标栅格。
由于MA*算法进行每次迭代所需时间很少,通过不断维护地图中每个栅格的p值就可以实现在一次新的迭代中获取当前环境中的最优多路径方案,从而实现了变化环境中的实时路径规划。
3 总结与展望
针对水下航行器技术发展和集群多任务的需求,开展了一系列相关关键技术研究,取得了许多重要的技术突破。文中概述了其中一些关于智能集群任务类型及其涉及关键技术的工作,包括集群围捕、路径规划和编队控制等。但是,由于水下机器人面临着复杂的环境和干扰,无法凭借简单的探测工具获取周围环境信息,仍然存在实际应用中亟待解决的技术难题。因此,水下智能集群协同技术在水下多任务领域展现出巨大的发掘潜力,值得进一步的研究与探索。
从协同围捕任务的角度分析,现有的研究注重理想环境中的任务策略研究。然而,水下环境复杂多变,多智能体之间的通信、各自的定位都具有一定的困难,这对水下多智能体集群系统的稳定性造成了很大的挑战。因此,水下智能集群系统从个体、系统模型到集群算法都具有其自身特殊性。未来研究方向应注重提高系统的稳定性,即提出一般的任务策略,降低对特定环境和条件的依赖,使其在不同环境中具有更好的适应能力。同时进一步提高航行器的智能化、自主化程度,使得集群系统更加适应独立复杂的任务需求,更好地完成任务。此外,还需要在研究过程中发现并提出完善准确的任务评价指标,这将有助于学习类算法的进步与实际应用,也能为水下多航行器协同围捕任务提供新的研究思路。
从路径规划任务的角度分析,相比于地面移动机器人和空中飞行器,水下智能集群的路径规划问题更为复杂,面临来自海底地形、海洋生物及海洋涡流等多方面因素的干扰。而相比于水下单路径规划,国内外学者对于水下多路径规划技术的研究相对较少。总体而言,目前水下智能集群路径规划技术围绕着提升单智能体系统对复杂海洋环境的应变能力、降低路径规划的实时计算成本、满足水下智能集群在不同工况下航路需求3 个方面,朝着高实时性、高动态避障性能和多指标优化方向发展。但水下智能集群的路径规划技术由于其复杂性仍未在应用层面取得重大进展,其在无人集群协同以及相关海洋技术领域的研究仍然具有广阔的发展空间。因此,未来的研究应注重动态环境的多路径规划技术,在提升规划路线的普适性和最优性的同时,降低对于环境信息的依赖程度,以有利于水下多路径规划技术在海洋集群技术领域得到更加广泛的实际应用。
从编队控制的角度分析,水下航行器集群通过一定的编队控制方法进行运动协调是实现高性能路径规划、高质量实时避障及高效率作业水平的先决技术之一。虽然在相关领域已取得了一定的研究成果,但仍难以满足实际应用需求。此外,相关研究仍缺乏对动态障碍、信道干扰和通信延迟等因素的考虑,同时主流的单一编队控制策略也难以实现灵活的编队队形切换、异构平台协同、异构感知信息融合等功能,使得水下自主集群的优越性仍未得到充分发挥,制约了水下智能系统的广泛应用。因此,未来的研究应注重发展弱通信条件下协同控制、编队任务多元化控制和异构系统控制策略,以有利于编队控制技术应用于不同的海洋环境及作业场景。
4 结束语
AUV 智能集群协同任务技术涉及机器人学、流体力学和智能科学等多个领域。现有研究更多的处在理论研究阶段,问题相对复杂,研究难度大。同时由于迫切而广泛的需求,该领域具有很高的研究价值和广阔的发展前景。但现有技术的研究更多地集中在基础理论及理想化环境中的应用程度,距离在实际环境中多种复杂任务的广泛应用仍然有相当的距离。可以预计在未来,随着航行器载体智能化和自主化程度的进一步提高以及水下集群协同技术的进一步突破,AUV 智能集群将在海洋探索、海洋开发与保护、维护国家海洋权益方面发挥重要作用。
