复杂天气状况下的太阳能混合跟踪系统及控制判据
2023-05-15王立舒房俊龙夏浩楠李欣然
王立舒,陈 曦,房俊龙,夏浩楠,刘 祺,李欣然,白 龙
·农业生物环境与能源工程·
复杂天气状况下的太阳能混合跟踪系统及控制判据
王立舒1,陈 曦1,房俊龙1※,夏浩楠1,刘 祺1,李欣然1,白 龙1,2
(1. 东北农业大学电气与信息学院,哈尔滨 150030;2. 牡丹江师范学院物理与电子工程学院,牡丹江 157011)
为了解决传统太阳能混合跟踪控制判据范围宽泛,不能准确识别天气情况的问题,该研究设计了一种复杂天气状况下的太阳能混合跟踪系统。通过分析非聚光与聚光条件下系统运行在不同跟踪策略下的跟踪特性,结合天气特征,提出以辐照度识别天气状况的多阈值控制判据。控制判据将天气划分为辐照度波动天气、高辐照度天气、低辐照度天气与辐照度极低天气,装置可根据外界气象变化自动调整光电跟踪、视日运动轨迹跟踪或固定倾角控制模式。该系统搭建Node-Red总控平台,采用并行控制,优化混合跟踪策略,控制信号稳定输出。试验结果表明:应用该判据的混合跟踪系统工作性能优良,非聚光条件下系统平均发电功率分别高出光电跟踪与视日运动轨迹跟踪0.03和0.16 W,聚光条件下系统平均发电功率达到0.81 W,高出光电跟踪0.03 W,高出视日运动轨迹跟踪0.55 W,由此可知,该系统能够提升光伏发电的输出电能,为太阳能混合跟踪系统的跟踪方式切换提供了理论依据。
太阳能;辐照度;试验;混合跟踪;发电功率;判据
0 引 言
太阳能作为一种清洁的可再生能源凭借着储量优势在能源需求巨大的当今社会扮演着重要的角色[1-2]。然而太阳空间位置多变,光照强度空间分布受到气候、时间的影响,导致太阳能源利用率始终低于预期状态[3]。引入跟踪系统是提高太阳能利用率的有效途径,相比于静态铺设,动态跟踪系统能源接受率可提高30%以上[4]。
太阳能跟踪技术根据控制方式不同可分为视日运动轨迹跟踪、光电跟踪以及两者结合的混合跟踪[5]。研究表明,混合跟踪能够兼顾光电跟踪与视日运动轨迹跟踪的优势,已成为太阳能跟踪技术的主流方向[6]。郭会超等[7]设计了一种光电跟踪为主,辅以视日运动轨迹跟踪的混合跟踪系统。将智能检测与自适应技术相结合,但该技术仅停留在理论层面,缺乏试验验证。樊海红等[8]提出了一种将光电跟踪与视日运动轨迹跟踪结合的太阳方位双模式跟踪系统,通过光照强度识别阴晴天气,晴天采用光电跟踪,阴天采用视日运动轨迹跟踪,依据光强传感器映射的数值大小进行切换,这也是目前较常用的一种切换方式[9]。但常见天气光照强度覆盖范围广,约为0~100 000 lx[10-12],光照强度控制判据范围划分宽泛,不能准确区分不同天气情况。且传统混合跟踪系统多采用单一阈值对天气进行分类,管理不同跟踪模式的相互切换[13],而多云等复杂天气的天气特性不同,单一阈值则难以区分。此外,传统的光强检测元件多采用光敏传感器,传感器的光电特性并非线性[14],以其输出的光强值作为切换依据也不够精准。也有研究人员通过改进光强传感器[15]或引进图像识别技术[16]提高混合跟踪系统效率,但以上方式对设备要求较为苛刻且成本较高。
相比于描述光场分布物理量的光照强度[17],辐照度具有面能量特性[18],与光伏电池发电功率具有更直观的特性关联[19],利于系统分析。且太阳辐照度对于天气类型起决定性作用[20],可由辐照度反映不同天气特性。辐照度是分析太阳能发电性质的重要参数,以辐照度作为混合跟踪判据能够将混合跟踪技术与太阳能发电特性相联系。为此,本文整合现有技术优势,设计了一种基于辐照度的太阳能混合跟踪系统,提出结合复杂天气识别的多阈值控制判据。研究系统在不同跟踪策略下接收辐照度与发电功率曲线,监测电池板温度变化,探究天气辐照度特性,建立混合跟踪方案。通过现场试验,分析聚光与非聚光条件下系统工作性能与跟踪效果。系统采用并行控制,光电跟踪与视日运动轨迹跟踪控制单元独立运行,控制信号指令稳定输出,为实际生产提供参考。
1 太阳能混合跟踪系统原理
1.1 混合跟踪系统工作原理
视日运动轨迹跟踪能根据天文算法推算出太阳在任意地点任意时间的相对位置,但计算过程中会产生累积误差,跟踪精度无法保证。光电跟踪利用光敏检测元件感知太阳位置,能保证跟踪精度,但极易受外界干扰。混合跟踪将两者结合,当天气晴朗时使用光电跟踪,以传感器的瞬时反馈对视日运动轨迹跟踪的累计误差进行修正[21],当外界光照条件不理想时,采用视日运动轨迹跟踪,弥补光电跟踪误动短板。
本系统采用混合跟踪技术,通过辐照度判断当前天气情况切换控制模式。阳光充足时,系统进入光电跟踪模式,光线较弱时,系统进入视日运动轨迹跟踪模式,外界光照极其微弱时,系统进入固定倾角模式。视日运动轨迹跟踪部分为保证跟踪精度选用Jean Meeus算法,计算结果的不确定度可达±0.000 3°[22],光电跟踪部分参考四象限光电探测器中和差比幅的处理方法[23],实时感知太阳光线的位置变化。
1.2 视日运动轨迹跟踪原理
本系统选用的Jean Meeus法主要是基于儒略日、儒略世纪、黄道坐标系等因素先计算赤纬角与时角,再通过球面坐标方程计算太阳高度角与方位角[24],对太阳运行轨迹进行综合分析,图1为太阳位置计算的地平坐标系几何模型。
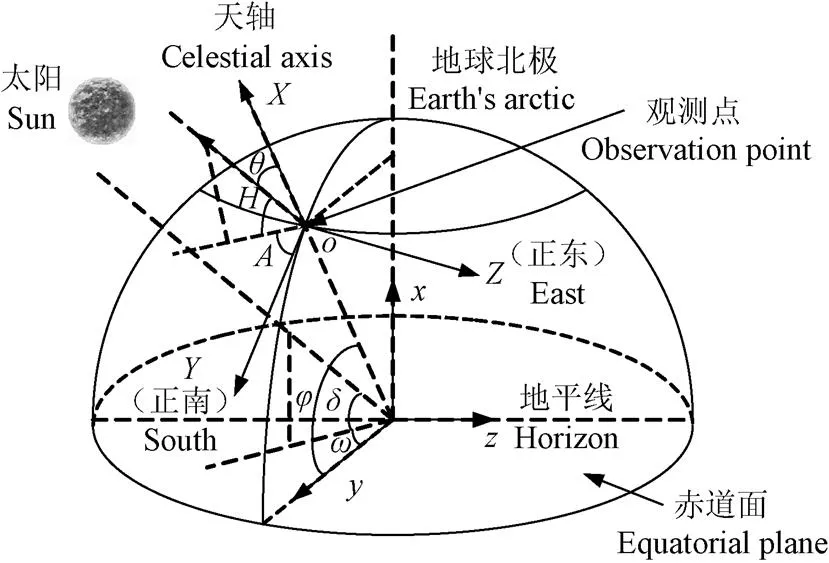
注:地平坐标系X轴为天顶方向,Y轴为正南方向,Z轴为正东方向;θ为天顶角,(°);H为高度角,(°);A为方位角,(°);φ为地理纬度,(°);δ为赤纬角,(°);ω为时角,(°)。
由于Jean Meeus天文算法公式较为复杂,为了清晰表达坐标关系,本研究根据文献[25]引入中间变量来合并原计算方法中的计算式,计算太阳高度角与方位角。太阳赤纬角的计算式如下:

式中为太阳赤纬角,(°);为订正黄赤交角,(°);1为中间变量。


式中为平均黄赤交角,(°);J为标准历元J2000起计算的儒略世纪。
为太阳方位角,以正南方向为180°,正东方向为90°,正西方向为270°,2为中间变量。

图中可以看出天顶角与太阳高度角两角互余,天顶角计算式如下:

式中为太阳天顶角,(°);为当地纬度,(°);为太阳赤纬角,(°);为太阳时角,(°)。
考虑大气折射影响后的订正太阳高度角H如下:
式中为大气折射订正值,该数值取值与太阳高度角所在范围有关。
支架跟踪角度需计算高度跟踪角与方位跟踪角,采用太阳方位角与订正太阳高度角H进行跟踪角度计算,计算式如下:
式中1为控制高度的跟踪角,(°);2为控制方位的跟踪角,(°)。
Jean Meeus天文算法公式繁杂且运算量大,单片机需要能够快速精确定位太阳位置,要求单片机必须具有较高的处理速度。为此,本文选用STM32F407单片机作为视日运动轨迹跟踪控制单元,相比于常见的51单片机与PLC单片机,STM32具有更高的性能与更快的数据连接和通讯速度。
1.3 光电跟踪原理
本系统选用4个光电一致性较好的光敏电阻模块,对称安装在十字挡板组成的4个象限内,通过转化阴影区产生的偏移信号驱动装置实时跟踪。
图2为光电跟踪算法原理。当太阳光入射光电传感器矩阵时,遮光板会导致4个象限传感器接收的光照强度互不相同[26]。控制器将采集对应象限的电压信号,利用电压偏差信号驱动舵机转动,计算式如下:
式中U、U、U、U分别为Ⅰ、Ⅱ、Ⅲ、Ⅳ象限传感器的电压测量值;ΔU、ΔU为电压偏差。
电压比较算法仅能指示舵机的旋转方向,不能直接判断角位移量,无需复杂的计算过程,故对单片机的计算能力没有较高要求。本文选用Arduino单片机作为光电跟踪控制单元,依据工程经验选定挡板高度为70 mm,光电传感器间隔距离为11.5 mm。
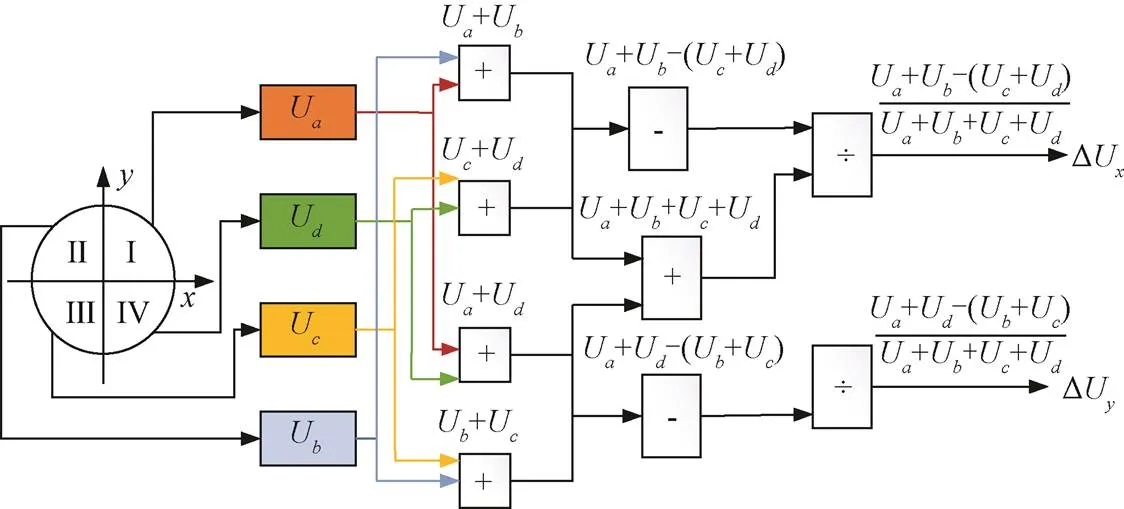
注:4个光敏电阻模块组成光电传感器矩阵,其中Ua、Ub、Uc、Ud分别为Ⅰ、Ⅱ、Ⅲ、Ⅳ象限光敏电阻模块的电压测量值,(V);ΔUx为水平方向的电压偏差,(V);ΔUy为垂直方向的电压偏差,(V)。
2 太阳能混合跟踪系统设计
2.1 混合跟踪装置设计
传统混合跟踪系统控制两种跟踪模式互相切换时需要较高的配合度,当遇到外力因素进行光电校正后,易引起视日运动轨迹跟踪采用的坐标系发生变化,可能造成严重偏离太阳方向的后果[27]。基于以上考虑,本文设计的混合跟踪装置采用并行控制,光电跟踪与视日运动轨迹跟踪算法运行在独立的控制单元,系统由光电传感器、辐照度传感器、CD4052信号切换模块、树莓派控制器、Arduino光电跟踪控制单元、STM32视日运动轨迹跟踪控制单元及双自由度舵机云台组成。混合跟踪装置的结构如图3所示。

图3 太阳能混合跟踪系统结构图
混合跟踪系统以树莓派作为主控制器进行数据处理,向CD4052信号切换模块传输数字信号发出控制命令。其中,Arduino光电跟踪控制单元运行四象限电压比较算法,通过模拟引脚读取电压值判断太阳位置,输出光电跟踪信号,STM32视日运动轨迹跟踪控制单元通过Jean Meeus天文算法计算太阳位置坐标与跟踪角,输出视日运动轨迹跟踪信号,固定倾角信号由Arduino光电跟踪控制单元稳定输出。信号切换模块同时接收3路并行的光电跟踪PWM信号、视日跟踪PWM信号与固定倾角PWM信号,结合辐照度反映的天气情况,由主控制器选择对应控制模式的PWM信号通过,驱动俯仰角舵机与偏航角舵机动作。
2.2 Node-Red混合跟踪模式切换设计
混合跟踪系统选择树莓派中的Node-Red编程工具,进行跟踪模式切换设计,该工具以拖放的形势搭建系统流程,通过浏览器上的编辑器设计节点快速连接硬件设备[28]。控制界面如图4所示。

图4 Node-Red控制界面
树莓派首先利用split、function及switch节点将获取的天气辐照度数值进行分组与划分,其次给出3种控制模式(光电跟踪、视日运动轨迹跟踪、固定倾角)的选择信号,最后通过向CD4052选择端A0/A1输入高/低电平的方式向外界输送选择信号,依据天气辐照度变化切换跟踪模式。系统工作过程中持续供给CD4052使能端低电平信号保证开关芯片导通,调试窗口可以实时监测到当前的辐照度值与控制模式,掌握舵机的运行状态。
3 混合跟踪系统研制及控制判据
3.1 非聚光太阳能混合跟踪系统样机试验
试验地点为哈尔滨市东北农业大学(45°74′N,126°73′E),选取2022年5月20日到2022年6月5日08:00-16:40进行非聚光太阳能混合跟踪系统试验。每隔20 min进行一次测量,测量持续时间为1 min,首先在光电跟踪模式下测量多组数据,之后在视日运动轨迹跟踪模式下测量多组数据,记录不同跟踪模式运行时系统的电压、电流、辐照度、温度数据,计算对应时刻不同跟踪模式下光伏电池的发电功率。为保证视日运动轨迹跟踪准确运行,需采用指南针调整装置的起始运行位置朝向正南方向,非聚光跟踪试验如图5所示。
非聚光跟踪试验选用1片80 mm×80 mm尺寸的多晶硅光伏电池,通过上位机信号切换光电跟踪模式与视日运动轨迹跟踪模式,分析不同天气下2种跟踪模式的切换依据并对判据展开研究。

1.光电传感器 2.光伏电池板 3.辐照度传感器 4.双自由度舵机云台 5.USB通讯模块 6.CD4052信号切换模块 7.PC端 8.树莓派控制器 9.STM32视日运动轨迹跟踪控制单元 10.Arduino光电跟踪控制单元 11.万用表
图6为非聚光晴天、多云天下太阳能跟踪系统运行在不同跟踪模式下的辐照度与发电功率曲线。晴天数据选取5月23日分析系统跟踪特性,光电跟踪与视日运动轨迹跟踪模式接收的辐照度与发电功率曲线如图6a所示。
晴天光电跟踪接收的辐照度与发电功率普遍高于视日运动轨迹跟踪,光电跟踪与视日运动轨迹跟踪获取的太阳辐照度值变化趋势基本保持一致。由于大气折射与机械误差等因素,导致视日运动轨迹跟踪计算出的动作位置与实际地面辐照度最强位置存在偏差。该偏差在11:00-13:00间达到峰值,视日运动轨迹跟踪接收的辐照度同光电跟踪最多可相差221 W/m2,正午时段视日运动轨迹跟踪发电功率较低。
5月23日晴天最高辐照度达到1 153 W/m2,当辐照度值处于835~1 153 W/m2之间时,相同时间段光电跟踪接收的太阳辐射更多且发电功率更高。此时光电跟踪能始终保持太阳垂直照射光伏电池板,但在15:00之后出现光电跟踪接收的太阳辐照度值急剧波动的现象(图6a)。由图6b可知,5月23日15:00-17:00时段内出现长时间云层遮挡,随着太阳西落,辐照度逐渐下降。光电跟踪控制下的舵机开始频繁动作,系统频繁调整位置导致光电跟踪效果变差。当光电跟踪接收的辐照度数值降到339 W/m2时,视日运动轨迹跟踪接收辐照度为621 W/m2,此时视日运动轨迹跟踪接收辐照度更高,具有较高的发电功率输出。

图6 非聚光太阳能跟踪系统不同跟踪模式辐照度及发电功率
试验选取6月4日分析多云天气下系统的跟踪特性,光电跟踪与视日运动轨迹跟踪模式接收的辐照度及系统发电功率如图6c所示。由图6c可知,6月4日多云天气的辐照度波动较大且波动明显,20 min内辐照度值波动可达869 W/m2。在试验过程中发现,该种天气类型下1 min内辐照度的波动约为340~500 W/m2。光电跟踪模式下装置将一直跟随辐照度变化反复动作寻找辐射最强位置,发电功率于0.09~0.99 W之间频频波动,全天平均发电功率为0.43 W。而视日运动轨迹跟踪运行较为稳定,全天平均发电功率0.47 W,更适合在该天气下运行。
理想条件下太阳能跟踪系统的发电功率曲线应基本与辐照度曲线一致,测量过程中发现温度是造成发电功率曲线较差的主要原因,光伏转换产生的电能还受光伏电池工作温度值的影响[29-30]。非聚光晴天、多云天下光电跟踪与视日运动轨迹跟踪模式下系统的发电功率与光伏电池板温度曲线如图7所示。
晴天温度对于发电功率的影响强于多云天气。由图7a可知,晴天13:00-14:00高温环境下,光电跟踪系统发电功率由0.74 W下降到0.66 W,视日运动轨迹跟踪系统发电功率由0.68 W下降到0.59 W,尤其在13:40,光伏电池板40 ℃的温度累积使光电跟踪与视日运动轨迹跟踪系统发电功率降低分别达0.05和0.04 W。根据图7b可知,对于多云天气,温度波动明显且平均温度低于晴天,此时辐照度在系统发电功率变化中起主导作用。
基于上述非聚光条件下的试验结果可知,非聚光跟踪系统晴天上午到正午光电跟踪接收辐照能量高于视日运动轨迹跟踪。当光电跟踪辐照度在339~150 W/m2范围内时,出现光电传感器感光失调,舵机频繁动作,光电跟踪接收辐照度低于视日运动轨迹跟踪。多云天气辐照度值短时间内波动较大,该种天气下视日运动轨迹跟踪受辐照度变化影响相对较小。
3.2 聚光太阳能混合跟踪系统样机试验
聚光跟踪试验选用1片10 mm×10 mm尺寸的GaAs光伏电池,将菲涅尔透镜放置于木制支架上聚光并安装水冷装置。该试验在水冷装置中加入制冷片,加大冷却效果,避免高倍聚光试验的危险性。选取2022年6月13日到2022年6月28日08:00-16:40进行聚光太阳能混合跟踪系统试验。每间隔20 min进行一次测量,每次跟踪模式测试时间为1 min,测试顺序为先进行光电跟踪测量,再切换为视日运动轨迹跟踪进行测量。聚光跟踪试验如图8所示。

图7 非聚光太阳能跟踪系统不同跟踪模式发电功率及光伏电池板温度
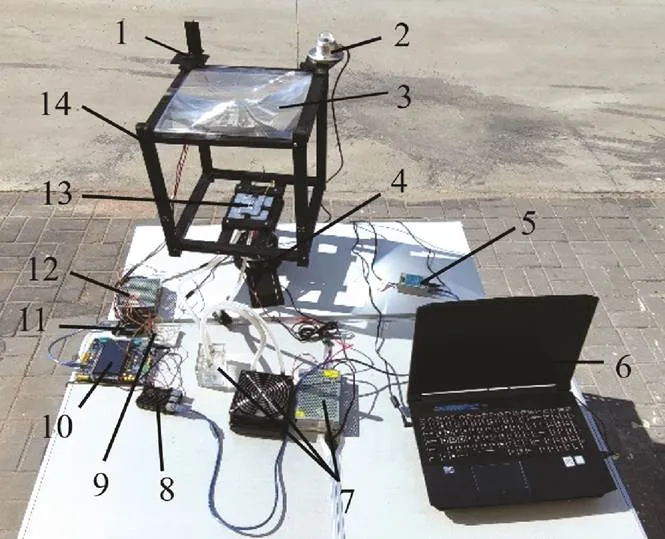
1.光电传感器 2.辐照度传感器 3.菲涅尔透镜 4.双自由度舵机云台 5.USB通讯模块 6.PC端 7.水冷装置 8.树莓派控制器 9.CD4052信号切换模块 10.STM32 视日运动轨迹跟踪控制单元 11.Arduino光电跟踪控制单元 12.蓄电池 13.GaAs光伏电池 14.木制支架
试验选取2022年6月28日的测量数据分析系统的聚光跟踪特性,该日08:00后为晴天,11:40至16:40为多云天,便于探寻不同天气下系统的跟踪性质及切换依据。聚光试验采集辐照度、电压、电流、发电功率数据过程与非聚光试验一致,聚光不同跟踪模式下系统接收的辐照度及发电功率如图9所示。
由图9可知,聚光条件下光电跟踪接收的辐照度及发电功率均高于视日运动轨迹跟踪,11:00-11:40出现2种跟踪模式接收辐照度虽然相差小(差值均低于97 W/m2),但光电跟踪系统发电功率远远大于视日运动轨迹跟踪的情况。因为此时电池表面出现明显光斑,视日运动轨迹跟踪方式的计算偏差导致光斑位置偏移,不同于光电跟踪下电池的直射储能,视日运动轨迹跟踪下的电池不能被光斑时刻覆盖,故与光电跟踪发电功率相差甚远。13:20光电跟踪下的系统发电功率高达3.03 W,而视日运动轨迹跟踪下的系统发电功率仅有0.09 W。
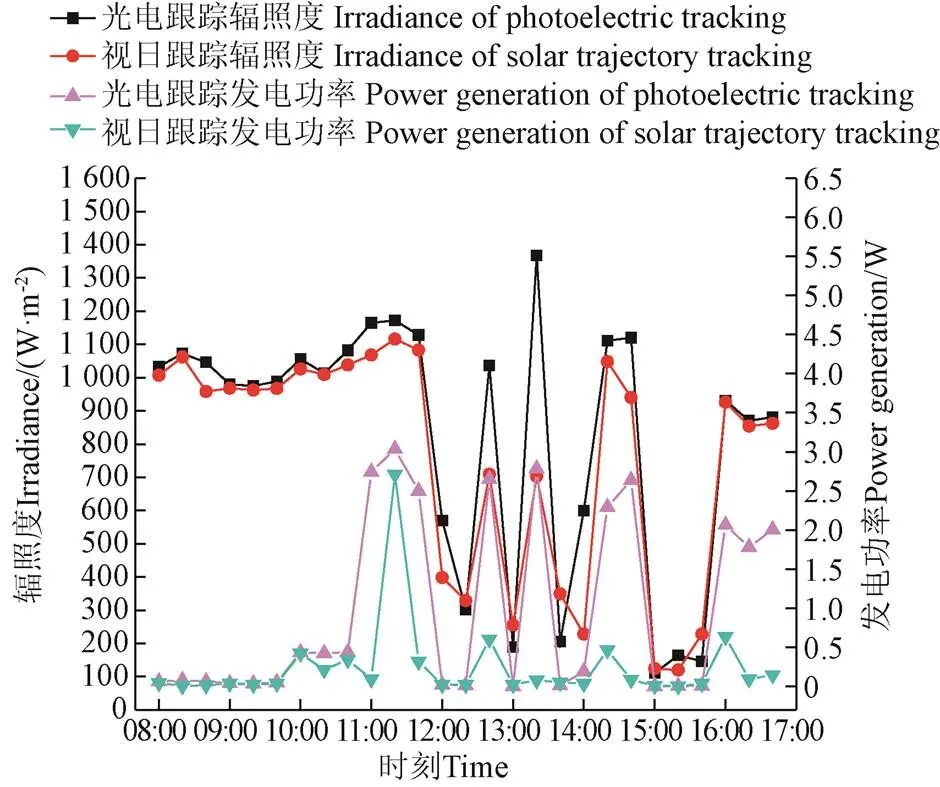
注:该日08:00-11:40为晴天,11:40-16:40为多云天。
基于上述聚光条件下的试验结果可知,聚光跟踪系统晴天光电跟踪效果明显优于视日运动轨迹跟踪。由图9可知,光电跟踪接收辐照度为302~111 W/m2时,存在光电跟踪系统发电功率小于视日运动轨迹跟踪系统发电功率的现象,此时光电跟踪接收辐照度小于视日运动轨迹跟踪,光斑扩散模糊甚至消失。当出现多云情况时,光电跟踪现象同非聚光测试效果一致,存在多动现象,即装置会跟随太阳辐照变化反复跟踪寻找辐照度最强位置。
3.3 混合跟踪系统控制判据研究
本系统的总体研究方案是在不同的天气情况下运行不同的跟踪方式。太阳能跟踪系统电能主要来源于光伏组件表面辐照能量的转化[31],光伏发电需要表面更高的辐照度,因此混合跟踪系统依据辐照能量进行切换。
太阳辐照度对于天气类型起决定性作用[20],不同天气特征可体现为辐照度的变化。相关气象研究表明:晴天辐照度范围约为500~1 400 W/m2,阴雨天辐照度范围约为10~491 W/m2,多云天气辐照度范围涵盖晴天与大部分阴雨天范围,约为250~1 400 W/m2[32-34]。实测数据发现,虽然多云天气会出现高辐照度,但辐照度数据在1 min内波动幅度较大。阴雨天辐照度数据较低,雨天辐照度均低于100 W/m2,处于极低水平。参考以上天气的辐照度范围,结合样机试验的测量数据,系统控制判据基于辐照度将天气划分为辐照度波动天气、高辐照度天气、低辐照度天气与辐照度极低天气,通过识别天气对应的辐照度变化切换控制模式。
考虑到系统辐照度传感器响应时间≤5 s,为保证辐照度测量数据的可靠性与系统指令输出的及时性,本系统设定辐照度传感器每6 s回传一次辐照度信息,选取1 min内的10个辐照度数值进行极值与均值数学计算,同阈值比较确定当前的天气类别。系统基于上述4类天气设定判据,设定辐照度波动判定阈值为,高辐照度判定阈值为,极低辐照度判定阈值为。设定10个辐照度数据中极大值为max,极小值为min,均值为v。
由于非聚光与聚光条件不会影响辐照度传感器的测试结果,因此,非聚光与聚光系统判据设置一致。标准状况下辐照度为1 000 W/m2时,误差为±3%,考虑仪器最大误差值30 W/m2,基于上述非聚光与聚光太阳能混合跟踪试验数据选择判据阈值。
对于阈值:多云天气的辐照度数值范围变化为167~1 193 W/m2,1 min内波动约为340~500 W/m2。光电传感器感光失调导致舵机频繁动作,切换为视日运动轨迹跟踪是该类天气更理想的运行模式。多云天气判定计算时需取辐照度差值,误差近似为0,因此,阈值取340 W/m2,以判定辐照度波动天气。对于阈值:系统测试晴天辐照度较高时,光电跟踪接收的辐照度明显高于视日运动轨迹跟踪。随着辐照度逐渐降低,光电跟踪模式运行下的装置出现多动现象,非聚光条件下光电跟踪接收辐照度低于视日运动轨迹跟踪的辐照度范围为339~150 W/m2。聚光条件下光电跟踪接收辐照度低于视日运动轨迹跟踪的辐照度范围为302~111 W/m2。当非聚光条件辐照度低于339 W/m2、聚光条件辐照度低于302 W/m2时均可能出现光电跟踪多动现象。因此,辐照度高于339 W/m2时光电跟踪运行效果较为稳定,考虑辐照度传感器误差30 W/m2,阈值取370 W/m2以判定适合光电跟踪的高辐照度天气。对于阈值:经测试,类似雨天等辐照度极低天气,辐照度值均在100 W/m2以下,平均辐照度值为51.8 W/m2,发电功率极低不宜采用跟踪装置。因此,考虑仪器误差为30 W/m2,辐照度低于100 W/m2时停止跟踪,阈值取130 W/m2以判定辐照度极低天气。判据设定如表1所示。
判据的天气范围界定与阈值设定一一对应,辐照波动天气辐照度范围较广,涵盖其他天气情况的辐照度范围,在系统运行中需先行判定辐照度波动天气。判据设置1 min内辐照度波动高于340 W/m2为辐照度波动天气,辐照度极值差(max-min)大于阈值,判定为辐照度波动天气。在排除辐照度波动天气后,辐照度高于370 W/m2为高辐照度天气,介于370~130 W/m2之间为低辐照度天气,低于130 W/m2为辐照度极低天气,通过均值v与阈值、比较确定以上天气。对于复杂天气情况如轻雾、雷阵雨、沙尘暴[35-36]等恶劣天气,可将天气状况依据辐照强度变化进行分类,使用辐照度判据切换跟踪模式适应复杂天气情况。
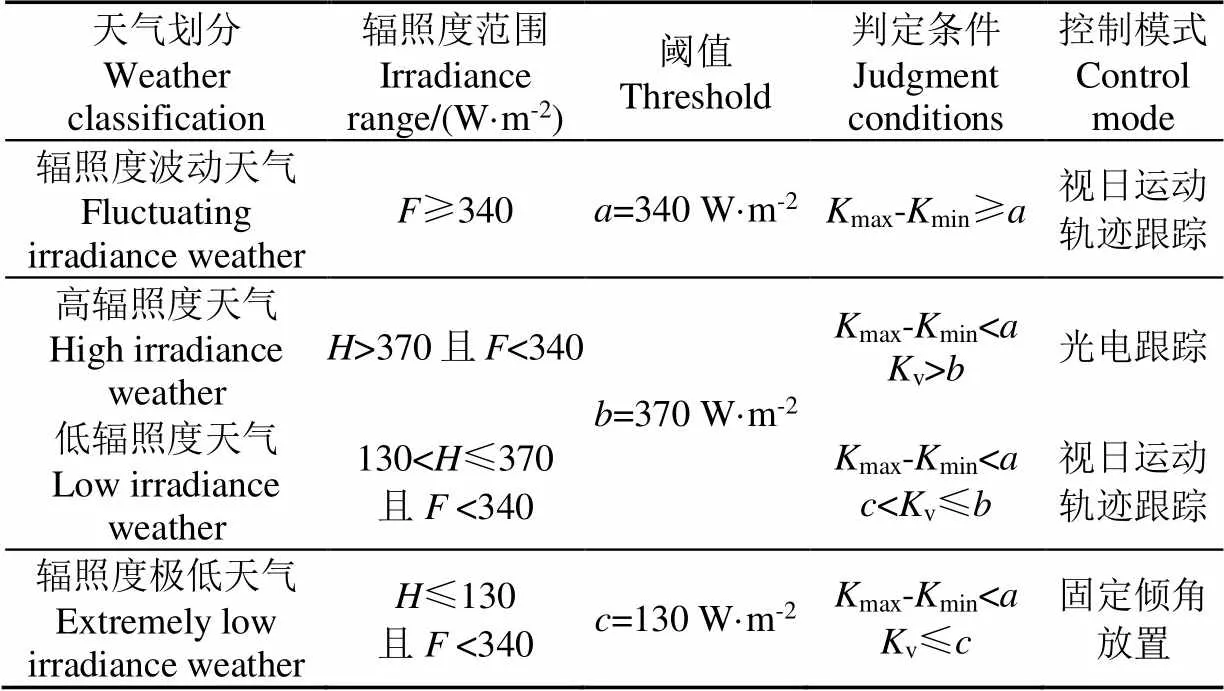
表1 混合跟踪系统控制判据设定
注:为当前辐照度值,(W·m-2);为1 min内辐照度的波动值,(W·m-2);max、min、v分别为1 min内10个辐照度值中极大值、极小值与平均值,(W·m-2)。
Note:is the current irradiance value, (W·m-2);is the fluctuation value of irradiance in one minute, (W·m-2);max,minandvare the maximum, minimum and average values of 10 irradiance values in one minute respectively, (W·m-2).
混合跟踪系统切换控制模式流程见图10。跟踪系统提取传感器回传的辐照度数据组进行计算,确定系统当前运行的跟踪模式。此外,根据工程经验,系统参考哈尔滨地区光伏组件最佳安装倾角数据,预设俯仰角43°方位角0°为固定倾角位置。
3.4 试验结果
测试时间选取2022年6月30日到2022年7月30日08:00-16:00,前15 d进行非聚光试验,后15 d进行聚光试验。非聚光与聚光条件下太阳能跟踪系统试验装置同上文保持一致。为验证判据对混合跟踪系统的控制效果,每日试验仅在一种跟踪模式下运行,选取辐照度近似,天气较为晴朗的试验数据进行分析。在非聚光与聚光条件下分别选取3 d试验数据,对光电跟踪、视日运动轨迹跟踪与混合跟踪模式下系统的发电功率进行对比,验证判据的控制效果。试验过程中每20 min记录1次系统发电功率数值,取每小时数据的平均值作为该小时的发电功率数据,结果见表2。

图10 太阳能混合跟踪系统控制流程
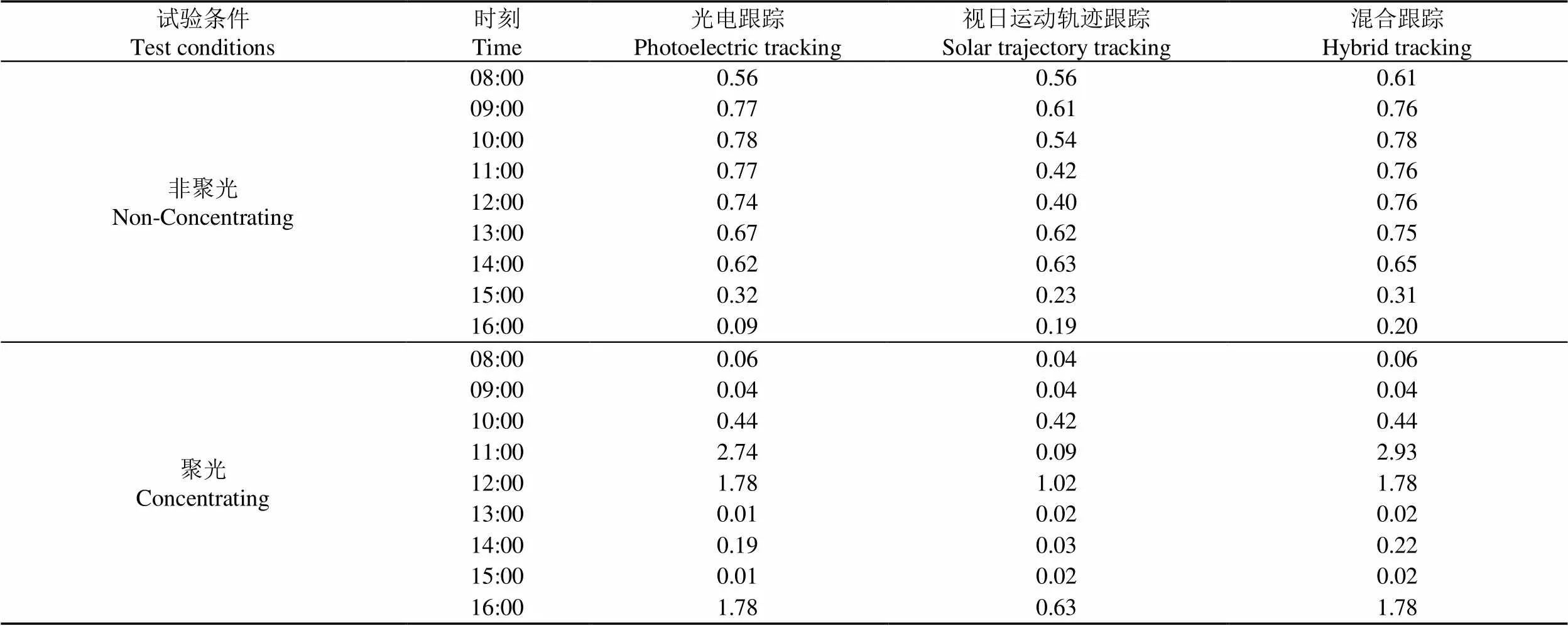
表2 非聚光与聚光条件下不同跟踪模式系统发电功率
非聚光不同跟踪模式下系统发电功率相对接近。视日运动轨迹跟踪全天平均发电功率0.46 W,11:00—12: 00光电跟踪发电功率值明显高于视日运动轨迹跟踪,此时视日运动轨迹跟踪计算偏差值较大,因此接收辐照度偏低,光伏电池板不能垂直对准太阳导致发电功率较低。光电跟踪全天平均发电功率0.59 W,比视日运动轨迹跟踪高出0.13 W,正午辐照度较高,光电跟踪具有一定优势。混合跟踪全天平均发电功率0.62 W,比光电跟踪平均发电功率高出0.03 W,比视日运动轨迹跟踪平均发电功率高出0.16 W,证实了该判据在非聚光条件下的可行性。
聚光不同跟踪模式下系统发电功率具有明显差距。视日运动轨迹跟踪全天平均发电功率为0.26 W,光电跟踪全天平均发电功率为0.78 W。混合跟踪全天平均发电功率为0.81 W,高出光电跟踪0.03 W,高出视日运动轨迹跟踪0.55 W,证实了该判据在聚光条件下的有效性。
4 结 论
本文针对传统混合跟踪判据不能准确识别天气的问题,提出了基于辐照度划分复杂天气情况的多阈值控制判据,分别进行了非聚光与聚光条件下的跟踪试验,得到以下结论:
1)温度升高会降低电池板发电功率。温度恒定条件下,辐照度是决定光伏电池输出功率变化的主导因素,因此,混合跟踪系统需跟踪高辐照度以获得更高的发电量。
2)辐照度的变化可直观体现不同的天气情况。本文参考气象数据并结合试验测量数据,将天气类型划分为辐照度波动天气、高辐照度天气、低辐照度天气与辐照度极低天气。设定1 min内辐照度波动不低于340 W/m2为辐照度波动天气判定条件,排除辐照度波动天气后,辐照度高于370 W/m2为高辐照度天气,介于370~130 W/m2之间为低辐照度天气,低于130 W/m2为辐照度极低天气。该分类方式可依据当前天气对应的辐照度变化驱动装置动作,不受复杂天气类型限制,具有一定的适普性。
3)本文基于非聚光与聚光条件下4类天气的系统跟踪效果设定辐照度阈值及控制判据。采用该控制判据的混合跟踪系统非聚光条件下平均发电功率分别高出光电跟踪与视日运动轨迹跟踪0.03和0.16 W,聚光条件下混合跟踪系统平均发电功率高出光电跟踪0.03 W,高出视日运动轨迹跟踪0.55 W。证实了控制判据的可行性,采用混合跟踪可有效提升系统的发电功率。
后续可针对太阳能跟踪系统电池板的温度恒定展开研究,提高光伏电池发电效率。未来可将太阳能混合跟踪系统应用于光伏屋顶、光伏幕墙与光伏遮阳板等光伏建筑上,不断推动中国节能环保战略。
[1] 孟醒. 太阳能利用的新方向[J]. 中国工业和信息化,2022(4):22-27.
MENG Xing. New direction of solar energy utilization [J]. China Industry and Informatization, 2022(4): 22-27. (in Chinese with English abstract)
[2] 王立舒,文竞晨,王锦锋,等. 基于微热管阵列的太阳能温差发电系统优化[J]. 农业工程学报,2019,35(22):251-256.
WANG Lishu, WEN Jingchen, WANG Jinfing, et al. Optimization of solar thermoelectric power generation components with micro heat pipe array[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(22): 251-256. (in Chinese with English abstract)
[3] 黄种明,许志龙,李煌. 光伏光热一体机的双光电跟踪太阳控制器研制[J]. 农业工程学报,2021,37(8):236-241.
HUANG Zhongming, XU Zhilong, LI Huang. Development of double photoelectric solar tracking controller for photovoltaic solar thermal integrated machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(8): 236-241. (in Chinese with English abstract)
[4] SEME S, ŠTUMBERGER B, HADŽISELIMOVIĆ M, et al. Solar photovoltaic tracking systems for electricity generation: A review[J]. Energies, 2020, 13(16): 4224.
[5] 王林军,门静,许立晓,等. 基于环境因素与模糊识别的太阳自动跟踪控制策略[J]. 农业工程学报,2015,31(9):195-200.
WANG Linjun, MEN Jing, XU Lixiao, et al. Solar auto-tracking control strategy based on environmental factors and fuzzy identification[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(9): 195-200. (in Chinese with English abstract)
[6] JAMROEN C, FONGKERD C, KRONGPHA W, et al. A novel UV sensor-based dual-axis solar tracking system: Implementation and performance analysis[J]. Applied Energy, 2021, 299: 117295.
[7] 郭会超,胡晓芳,黄家敏. 光伏发电系统智能检测与自适应跟踪技术的研究[J]. 内蒙古煤炭经济,2021(16):39-40.
GUO Huichao, HU Xiaofang, HUANG Jiamin. Research on intelligent detection and adaptive tracking technology of photovoltaic power generation system[J]. Inner Mongolia Coal Economy, 2021(16): 39-40. (in Chinese with English abstract)
[8] 樊海红,康天桂,张培珍,等. 太阳方位双模式跟踪系统的研究[J]. 现代电子技术,2020,43(16):51-55.
FAN Haihong, KANG Tiangui, ZHANG Peizhen, et al. Research on dual-mode tracking system of solar azimuth[J]. Modern Electronic Technology, 2020, 43(16): 51-55. (in Chinese with English abstract)
[9] ZSIBORÁCS H, PINTÉR G, VINCZE A, et al. A control process for active solar-tracking systems for photovoltaic technology and the circuit layout necessary for the implementation of the method[J]. Sensors, 2022, 22(7): 2564.
[10] 祁琛阳,王成龙,吴泽睿. 一种高精度太阳能跟踪控制系统设计与实现[J]. 建模与仿真,2022,11(3):744-754.
QI Chenyang, WANG Chenglong, WU Zerui. Design and implementation of a high-precision solar tracking control system[J]. Modeling and Simulation, 2022, 11(3): 744-754. (in Chinese with English abstract)
[11] 李立鹏,高建,黄天怡,等. 基于多模式融合的双自由度太阳能追踪系统的研究与设计[J]. 天津科技,2019,46(4):57-59,63.
LI Lipeng, GAO Jian, HUANG Tianyi, et al. Research and design of a two-degree-of-freedom solar tracking system based on multi-mode fusion[J]. Tianjin Science and Technology, 2019, 46(4): 57-59, 63. (in Chinese with English abstract)
[12] 许迎东. 基于单片机控制的移动式光伏跟踪系统研究与设计[D]. 保定:河北大学,2021.
XU Yingdong. Research and Design of Mobile Photovoltaic Tracking System Based on MCU Control[D]. Baoding: Hebei University, 2021. (in Chinese with English abstract)
[13] LI Q, LIU H D. Design of solar energy automatic tracking control system based on single chip microcomputer[J]. IOP Conference Series: Earth and Environmental Science, 2019(242): 022056.
[14] SAFAN Y M, SHAABAN S, EL-SEBAH M I A. Performance evaluation of a multi-degree of freedom hybrid controlled dual axis solar tracking system[J]. Solar Energy, 2018, 170: 576-585.
[15] 王林军,门静,张东,等. 太阳自动跟踪系统中光电传感器的设计[J]. 农业工程学报,2015,31(14):179-185.
WANG Linjun, MEN Jing, ZHANG Dong, et al. Research and design of mobile photovoltaic tracking system based on MCU[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 179-185. (in Chinese with English abstract)
[16] 吴硕,赵继忠. 双轴高精度太阳能自适应跟踪系统研究与设计[J]. 电源技术,2022,46(3):335-339.
WU Shuo, ZHAO Jizhong. Research and design of dual-axis high-precision solar adaptive tracking system[J]. Chinese Journal of Power Technology, 2022, 46(3): 335-339. (in Chinese with English abstract)
[17] LI D H W, CHAU N T C, WAN K K W. Predicting daylight illuminance and solar irradiance on vertical surfaces based on classified standard skies[J]. Energy, 2013, 53: 252-258.
[18] 严晓瑜,杨苑媛,缑晓辉,等. 基于TUV模式的银川光化辐射通量特征及其影响因子[J]. 气象与环境学报,2022,38(3):127-136.
YAN Xiaoyu, YANG Yuanyuan, GOU Xiaohui, et al. Analysis of actinic flux and its influence factors in Yinchuan based on TUV model[J]. Journal of Meteorology and Environment, 2022, 38(3): 127-136. (in Chinese with English abstract)
[19] 姚宏民,杜欣慧,秦文萍. 基于密度峰值聚类及GRNN神经网络的光伏发电功率预测方法[J]. 太阳能学报,2020,41(9):184-190.
YAO Hongmin, DU Xinhui, QIN Wenping. PV power forecasting approach based on density peak clustering and general regression neural network[J]. Acta Energiae Solaris Sinca, 2020, 41(9): 184-190. (in Chinese with English abstract)
[20] 程启明,张强,程尹曼,等. 基于密度峰值层次聚类的短期光伏功率预测模型[J]. 高电压技术,2017,43(4):1214-1222.
CHENG Qiming, ZHANG Qiang, CHENG Yinman, et al. Short-term photovoltaic power prediction model based on hierarchical clustering of density peaks algorithm[J]. High Voltage Technology, 2017, 43(4): 1214-1222. (in Chinese with English abstract)
[21] 宁宇,彭佑多,颜健. 三棱台式太阳跟踪光电传感器及特性[J]. 传感器与微系统,2018,37(12):13-16,20.
NING Yu, PENG Youduo, YAN Jian. Triangular solar tracking photoelectric sensor and its characteristics[J]. Transducer and Microsystem Technologies, 2018, 37(12): 13-16, 20. (in Chinese with English abstract)
[22] 王炳忠,汤杰. 几种太阳位置计算方法的比较研究[J]. 太阳能学报,2001,22(4):413-417.
WANG Bingzhong, TANG Jie. Comparison of the different methods for solar position calculation[J]. Acta Energiae Solaris Sinca, 2001, 22(4): 413-417. (in Chinese with English abstract)
[23] 龚元霞,刘福华,许孝敏,等. 基于四象限的光斑位置探测系统设计[J]. 科学技术创新,2020(28):38-39.
GONG Yuanxia, LIU Fuhua, XU Xiaomin, et. al. Research on target tracking system based on four-quadrant photoelectric detection[J]. Science and Technology Innovation, 2020(28): 38-39 (in Chinese with English abstract)
[24] JEAN M. Astronomical Algorithms[M]. Inc Rich-mond, Virginia, USA, 1991: 151-154.
[25] 杨磊. 基于数字孪生的光伏跟踪支架控制系统研究[D]. 哈尔滨:东北农业大学,2021.
YANG Lei. Research on Control System of Photovoltaic Tracking Bracket Based on Digital Twin[D]. Harbin: Northeast Agricultural University, 2021. (in Chinese with English abstract)
[26] 封居强,杨伟虎,韩芳. 基于四象限法则的高精度太阳能跟踪系统设计[J]. 电源技术,2019,43(10):1718-1721.
FENG Juqiang, YANG Weihu, HAN Fang. Design of solar tracking system with high precision based on four-quadrant rule[J]. Chinese Journal of Power Sources, 2019, 43(10): 1718-1721. (in Chinese with English abstract)
[27] 陈舟. 太阳能双轴自动跟踪系统设计与研究[D]. 武汉:湖北工业大学,2015.
CHEN Zhou. Design and Research of Solar Biaxial Automatic Tracking System[D]. Wuhan: Hubei University of Technology, 2015. (in Chinese with English abstract)
[28] 韩梦佳,曲铭雯. 基于神经网络的船舶倾覆预警系统[J]. 电子设计工程,2020,28(6):64-68.
HAN Mengjia, QU Mingwen. Pre⁃warning system for ship capsizing based on natural network [J]. Electronic Design Engineering, 2020, 28(6): 64-68. (in Chinese with English abstract)
[29] 王立舒,冯广焕,张旭,等. 聚光太阳能光伏/温差热复合发电系统设计与性能测试[J]. 农业工程学报,2018,34(15):246-254.
WANG Lishu, FENG Guanghuan, ZHANG Xu, et al. Design and performance test of concentration solar PV/TE compound power generation system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(15): 246-254. (in Chinese with English abstract)
[30] 王立舒,党舒俊,苏继恒,等. 热开关控制光伏/温差联合发电装置设计提高发电效率[J]. 农业工程学报,2018,34(14):196-204.
WANG Lishu, DANG Shujun, SU Jiheng, et al. Design of PV/TE hybrid power generation device based on thermal switch and its improving efficiency of power generation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(14): 196-204. (in Chinese with English abstract)
[31] KANT K, SHUKLA A, SHARMA A, et al. Thermal response of poly-crystalline silicon photovoltaic panels: Numerical simulation and experimental study[J]. Solar Energy, 2016, 134: 147-155.
[32] 韩喜莲,朱垚宇. 相变储能型太阳能真空集热管运行特性研究[J]. 兰州理工大学学报,2022,48(2):123-130.
HAN Xilian, ZHU Yaoyu. Study on the operational characteristics of phase change energy storage solar vacuum collector[J]. Journal of Lanzhou University of Technology, 2022, 48(2): 123-130. (in Chinese with English abstract)
[33] 姚万祥,李峥嵘,李翠,等. 各种天气状况下太阳辐射照度与太阳光照度关系[J]. 同济大学学报(自然科学版),2013,41(5):784-787.
YAO Wanxiang, LI Zhengrong, LI Cui, et al. Relationship between bolar radiance and solar illuminance under all sky types[J]. Journal of Tongji University (Natural Science Edition), 2013, 41(5): 784-787. (in Chinese with English abstract)
[34] 郑丹,马尚昌,张素娟. 一种基于MEA-BP的太阳辐射反演算法[J]. 气象科技,2018,46(5):860-867.
ZHENG Dan, MA Shangchang, ZHANG Sujuan. Solar radiation inversion algorithm based on MEA-BP[J]. Meteorological Science and Technology, 2018, 46(5): 860-867. (in Chinese with English abstract)
[35] 唐国栋,蒙仲举,高永,等. 沙区光伏阵列对近地层风沙输移的干扰效应[J]. 农业工程学报,2021,37(13):101-110.
TANG Guodong, MENG Zhongju, GAO Yong, et al. Interference effect of solar photovoltaic array on near surface aeolian sand transport in sandy areas[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(13): 101-110. (in Chinese with English abstract)
[36] 朱宾宾,孙双红,李艳红,等. 呼伦贝尔沙地紫外辐射和太阳总辐射特征[J]. 中国沙漠,2021,41(1):111-118.
ZHU Binbin, SUN Shuanghong, LI Yanhong, et al. Characteristics of ultraviolet radiation and global radiation in alpine desert): A case of Hulun Buir Sandy Land[J]. Journal of Desert Research, 2021, 41(1): 111-118. (in Chinese with English abstract)
Solar hybrid tracking system under complex weather conditions and control criterion
WANG Lishu1, CHEN Xi1, FANG Junlong1※, XIA Haonan1, LIU Qi1, LI Xinran1, BAI Long1,2
(1.,,150030,;2,,157011,)
Solar tracking technology has been widely used in large power stations, photovoltaic agriculture, and green building industry. Among them, hybrid tracking can be expected to consider both photoelectric and solar trajectory tracking. However, it is still lacking in the accurate evaluation of different weather conditions, due to the excessively broad control criterion in the solar hybrid tracking using light intensity, and the vague conditions for the weather identification. In this research, a solar hybrid tracking system was designed under complex weather conditions. Moreover, a multi-threshold control criterion was proposed to divide the weather conditions. The tracking characteristics of the system were analyzed under different tracking strategies in the concentrated and non-concentrated environments, combined with the weather conditions.The control criterion was classified into irradiance fluctuation, high irradiance, low and extremely low irradiance weather. As such, the photoelectric and solar trajectory tracking automatically adjusted, or fixed the inclination angle, according to the external weather changes. Firstly, the prototype of a hybrid tracking system was developed for solar power generation. Specifically, the Raspberry Pi 4B controlled by Node-Red was used as the control core, and the signal was divided by the analog switch of CD4052. At the same time, the photoelectric tracking signal and the fixed inclination angle placement signal were outputted by Arduino, whereas, the tracking signal of the solar trajectory was outputted by STM32F407.Three-way parallel control was adopted to avoid interference with each other in the different control strategies. Secondly, a series of tracking tests were carried out to determine the foundation for the switching of the tracking system under concentrated and non-concentrated light conditions. The switching criteria were summarized for the hybrid tracking system since the tracking performance of the system varied depending on the weather and the tracking mode. The irradiance and power generation curves were also determined that the system received under various tracking strategies. A hybrid tracking scheme was developed to investigate the influence of weather on irradiance characteristics, in order to keep tracking the temperature change of battery panels. The irradiance and temperature curves demonstrated that the irradiance was the primary determinant of the variance in PV cell output, while the temperature remained constant. As a result, the hybrid tracking system can be expected to track the high irradiance for higher power production. Finally, the tracking prototype was tested to verify the impact of the criterion program on the hybrid tracking system. The test results showed that the average power generation of a no-concentrated hybrid tracking system on a sunny day was 0.03 and 0.16 W higher than that of photoelectric and solar trajectory tracking. Additionally, the average power generation of the concentrated hybrid tracking system on a sunny day was 0.81, which was 0.03 and 0.55 W higher than that of photoelectric and solar trajectory tracking. Anyway, the experiment verified the feasibility of the developed device. The new criterion can also provide a promising idea for hybrid tracking technology under complex weather.
solar energy; irradiance; test; hybrid tracking; power generation; criterion
10.11975/j.issn.1002-6819.202211251
TM913
A
1002-6819(2023)-05-0156-10
王立舒,陈曦,房俊龙,等. 复杂天气状况下的太阳能混合跟踪系统及控制判据[J]. 农业工程学报,2023,39(5):156-165.doi:10.11975/j.issn.1002-6819.202211251 http://www.tcsae.org
WANG Lishu, CHEN Xi, FANG Junlong, et al. Solar hybrid tracking system under complex weather conditions and control criterion[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(5): 156-165. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202211251 http://www.tcsae.org
2022-11-30
2023-02-21
黑龙江省教育厅科技课题(12521038);黑龙江省教育厅基本科研业务费支持项目(1452MSYYB009);牡丹江师范学院青年学术骨干项目(GG2018004)
王立舒,博士,教授,博导。研究方向为农业电气化与自动化;电力新能源开发与利用。Email:wanglishu@neau.edu.cn
房俊龙,博士,教授,博导。研究方向为电力系统自动化、信息处理与智能测控。Email:junlongfang@126.com
