基于皮尔逊相关系数和信息熵的多传感器数据融合
2023-05-12祝小钧
陶 洋,祝小钧,杨 柳
(重庆邮电大学 通信与信息工程学院,重庆 400065)
1 引 言
大多数传感器容易受到环境因素的影响,从而降低数据的可靠性.与单个传感器相比较,多个传感器采集的数据具有更高的参考价值.然而,传感器数据中也可能包含一些不可靠的信息.因此,为了进一步提高数据的可靠性,20世纪80年代提出的多传感器数据融合技术目前仍是研究热点.经过长时间的研究,已经发展出一些经典的多传感器数据融合算法,如Kalman滤波[1]、贝叶斯估计[2]、加权平均[3]、D-S证据理论[4]、模糊逻辑[5]、聚类分析[6]、人工神经网络[7]等.
多传感器数据融合可分为3个层次:数据层、特征层和决策层.Dempster-Shafer证据理论(简称DS证据理论)是一种经典的决策层的数据融合算法.证据理论是由Dempster[8]在1967年提出,Shafer[9]在1978年进一步发展用来处理不确定性信息的推理.由于DS证据理论能够在没有先验信息的情况下对不确定和不精确的信息进行建模和分析,因此它被应用于机器人领域[10]、目标识别[11]、故障诊断[12,13]、多准则决策[14]、风险评估[15]等多个领域.
虽然DS证据理论在许多领域得到了广泛的应用,但在处理高冲突证据时,容易产生违背直觉的结果.有两种方法可以缓解高冲突数据融合带来的不利影响.一个是修改Dempster的组合规则,另一个是对证据进行处理.第一种方法的修改规则会损害证据的互换性等;因此,它具有一定的局限性.大多数人更喜欢第2种方法,因为它的效率性和灵活性.可信度高的证据将被赋予更大的权重,反之,可信度低的证据将被赋予更小的权重.然后根据权重系数对证据的可信度进行调整.最后,根据相应Dempster的组合规则进行数据融合.Murphy[16]提出的简单平均法给每个证据赋予的权重是相等的,但是没有考虑到两两证据之间的相关性,这在实际应用中是不合理的.Y.Deng[17]等人提出了基于距离的加权平均方法,该方法既保留了简单平均法的属性,又反映了两两证据之间的相关性,在一定程度上弥补了前者的不足.Yager[18]等人提出了一种新的数据融合公式.他们认为,冲突的证据不能提供有用的信息,应该归入未知领域.该方法在处理两个证据融合时效果较好,但在处理多个证据的数据融合时效果不太理想.Sun[19]等人认为即使有相互矛盾的证据,仍然可以提供有用的信息,因此他们提出了一个加权数据融合公式,在一定程度上弥补了前者的不足.Xiao[20]等人提出了一种基于可信度发散测度和信息熵的数据融合方法.利用Jensen-Shannon散度度量证据之间的冲突程度,通过邓熵度量证据的不确定性.同时考虑这两个因素,调整证据的可信度,以缓解数据融合中高冲突数据的负面影响,提高数据融合的准确性.An[21]等人提出了一种新的基于模糊理论的数据融合方法.在证据体的相似度模型中,利用模糊推理机制度量证据间的冲突程度,并结合证据的不确定性,对其权重进行修正,有效地提高了故障诊断效率.Zhang[22]等人提出了一种方法,将Pearson相关系数与DS证据理论相结合来处理证据之间的冲突,但它只考虑了两两证据之间的相关性,而没有考虑到证据的重要性.Zhou[23]等人使用Pearson相关系数来衡量证据的可靠性来判断事件发生的概率,没有考虑证据的不确定性.
从以上分析可以看出,上述方法无法准确的测量出两两证据体之间的冲突程度,而皮尔逊相关系数在度量证据体之间的冲突程度上表现较好.同时,考虑到证据的不确定性,经典的香农熵算法在测量证据的不确定性方面也有很好的表现.因此,为了减轻融合过程中高冲突证据带来的负面影响,避免DS组合规则出现反直觉的结果,提高融合结果的准确性,本文提出了一种基于皮尔逊系数和信息熵的多传感器数据融合方法.首先,利用皮尔逊相关系数算法获取两两证据之间的相关性,并形成相关性矩阵来获取每一个证据的可信度.同时,通过信息熵算法得到每个证据的信息量,也可称之为测度证据的不确定性.然后,在获得证据不确定性的基础上,对证据的可信度进行修正.然后将改进后的证据可信度与证据的基本概率分配矩阵相乘,得到加权平均证据.最后,在Dempster组合规则下进行数据融合.通过数值算例验证了该方法的可行性、鲁棒性和有效性.
2 相关理论
DS证据理论[24,25]是处理不确定信息的经典算法,它可以在没有先验信息的情况下,对不确定信息进行灵活有效地建模.当每个事件的发生概率确定后,DS证据理论可以转化为贝叶斯概率理论,因此,DS证据理论也可以说是贝叶斯理论的扩展.DS证据理论主要由质量函数、信念函数和Dempster证据组合规则组成.基本概念如下.
2.1 DS证据理论
定义1.识别框架:集合L由一系列相互独立的事件构成,表示为L={U1,U2,…,Ui,…,UN},集合L被称为识别框架.L的幂集用2L表示,
2L={∅,{U1},…,{UN},{U1,U2},…,{U1,U2,…,Ui},…,L}
(1)
其中∅为空集合.如果A∈2L,则A被称为命题.对于识别框架L,质量函数m是2L到[0,1]的映射,形式上定义为:
m:2L→[0,1]
(2)
满足下面的条件:
(3)
在Dempster-Shafer证据理论中,质量函数也叫做基本信念赋值(BBA).如果m(A)>0,则称A为焦点元,所以焦点元的并集称为质量函数的核心.
定义2.信念函数:对于一个命题A⊆L,它的信任函数Bel:2L→[0,1]被定义为:

(4)
似然函数Pl:2L→[0,1]定义为:

(5)

定义3.Dempster-Shafer组合法则
在识别框架L上有两个独立的BBA,即m1,m2.Dempster-Shafer的组合规则记为m=m1⊕m2,其中⊕称为正交和,定义如下:
(6)

2.2 皮尔逊相关系数
皮尔逊相关系数[26,27]主要是用来衡量两个向量之间的相关性程度,它的取值范围是[-1,1].如果值>0,表示两个向量成正相关;如果值<0,则两个向量成负相关;如果值等于0,则两个向量不相关.皮尔逊相关系数的定义如下.
定义4.相关系数
(7)

2.3 信念熵
信息熵[28,29]是度量信息的不确定性的经典方法.它的值越大就表示该事件包含的信息量就越大,发生的概率就越低.2001年,Claude E.Shannon提出了香农熵,用来估算证据体中包含的信息量,以此推算出该证据体包含的不确定性.本文使用香农熵来计算证据体中包含的信息量,也可用来度量证据体之间的相对重要性.信息熵的定义如下:
定义5.信息熵

(8)

3 提出的算法
针对上述问题,提出了一种基于皮尔逊相关系数和信念熵的多传感器数据融合方法,这是一种新的组合模型,以减少数据融合中高冲突数据带来的不良影响.首先,采用皮尔逊相关系数来衡量两个证据之间的相关性,进一步获得证据的可靠性.当一项证据的信度高于另一项证据时,表明该证据与其他证据的冲突程度较低,应给予较大的权重.相反,如果证据的可靠性较低,这意味着该证据与其他证据有很大的冲突,应该给予较小的权重.同时,利用信息熵对各证据的不确定性进行度量.然后,考虑证据的可靠性和不确定性,根据Dempster组合规则对数据进行融合,得到最终命题发生的概率.该方法的流程图如图1所示.

图1 算法流程图Fig.1 Algorithm flow chart
3.1 计算证据的可信度
步骤1.利用皮尔逊相关系数计算证据体mi(i=1,2,…,k)和mi(i=1,2,…,k)的相关性.在多证据的情况下,计算出的相关性系数构成相关性矩阵sij.
(9)
皮尔逊相关系数的取值范围是[-1,1],正值表示证据体之间是正相关的,负值表示证据体之间是负相关的的,0值表示证据体之间是不相关的.为了减少它对整体识别框架的基本概率影响,将相关性结果≤0的数赋值为0.001.
步骤2.证据体mi的支持度可定义为:
(10)
步骤3.证据体mi的可信度定义为:
(11)
3.2 计算证据的信息量
步骤4.利用公式(8)计算出证据体mi(i=1,2,3,…,k)的信息量.
步骤5.为了防止证据在某些特殊情况下被分配到零权重,本文所提的方法将信息熵为0的数赋值为1.
步骤6.将证据体mi的信息量归一化如下,记为:
(12)
3.3 生成并融合加权平均证据
步骤7.在信息熵的基础上,对可信度进行修正,记为ACrddi:
(13)
步骤8.将调整后的可信度归一化,可认为是每个证据体mi的最终权重:
(14)
步骤9.计算加权平均证据:
(15)
步骤10.在k个证据体的情况下,通过Dempster组合规则,将加权平均证据融合k-1次,然后得到多证据数据融合的结果.
4 算法性能评估
在这一部分中,选择用3个具有代表性的高冲突证据的例子.在可行性、鲁棒性和有效性方面,将所提方法与上述方法进行了比较,证明了所提方法的优良性能.
4.1 可行性
用常见的高冲突例子来说明所提方法可以有效解决使用DS证据理论的组合规则中高冲突证据数据融合的反直觉问题.
例1.证据体m1对命题A的支持度最高,证据体m2中命题C的支持度最高,明显能看出证据体m1和证据体m2是相互冲突的.如果仅有两组冲突的证据体,则无法进行正确的融合决策.证据体m3存在的意义就是为了更好地做决策.具体数值如表1所示.
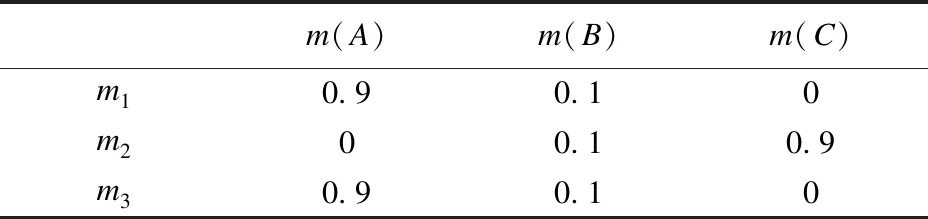
表1 一个高冲突证据的典型例子Table 1 Classic example of highly conflicting evidence
将证据分为m1,m2和m1,m2,m3两组分别进行数据融合,得到的融合结果如表2所示.
从表2的融合结果中可知,在Dempster的组合规则下,命题m(B)发生的概率为100%.显然,这是一个反直觉的结果.换句话说,高冲突证据在Dempster的规则下融合结果是不准确的,甚至是错误的.Sun等人和Yager等人所提出的算法,将大部分冲突转移到识别框架L,但是没有正确找到应该发生的事件,这是不合理的.然而,本文所提的方法无论在2个证据的数据融合结果中,还是3个证据数据融合中,都判断事件A发生的概率最大,这与直觉结果是一致的.

表2 两个证据和3个证据的融合结果Table 2 Data fusion results of two evidence and three evidence
证据体m1和m2是完全冲突的两组数据,无法得到精确的判断.Zhou等人提出的算法在证据m1m2融合中,错误地判断事件B发生的概率最大,与DS证据理论一样出现了反直觉结果.虽然在证据m1m2m3的融合结果中判断为事件A发生的概率最大,但是本文所提的方法判断事件A发生的概率达到99.86%,比Zhou等人出的算法提高了36.18%.为了消除冲突数据带来的影响,本文所提的方法,考虑了证据之间的冲突程度和证据之间的不确定性,结合这两个因素,大大地减少了冲突证据之间对证据融合过程的影响,提高了融合结果的可靠性和准确度.
4.2 鲁棒性
在现实场景中,传感器会放在不同的位置采集不同的数据.随着时间的推移,传感器对周围环境的感知是变化的、不稳定的,所以数据会在一定范围内波动,这不仅会影响到质量函数的分布,而且会直接影响到数据融合的结果.
例2.识别框架L有3个独立的事件,每个事件中有4种类型的影响因子.其中证据体m3和证据体m4是有波动的两组数据.具体数值如表3所示.

表3 例2的质量函数分布Table 3 Distribution of the mass function for example 2
因为m3和m4是有波动的两组数据,我们将分别对m1m2m3和m1m2m4进行数据融合操作,其数据融合结果如图2所示.
从图2中可得知,在两组数据融合结果中,本文所提的方法都是支持命题A发生的概率最高,分别比An等人提出的方法分别提高了2.67%和3.22%,比Zhang等人提出的方法分别提高了4.06%和4.59%,比Ma等人提出的方法分别提高了8.07%和9.92%,比Murphy等人提出的方法分别提高了44.04%和48.31%,这说明本文提出的方法构建的新模型在证据的细微波动中对融合结果基本没影响.
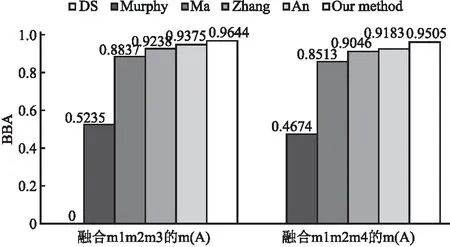
图2 两组数据的鲁棒性对比Fig.2 Comparison of the robustness of the two sets of data
在实际应用场景中,虽然传感器采集的数据有细微差异,但是本文提出的方法构建的新模型具有较强的鲁棒性,对最后的融合结果不会产生影响.换句话说,这种既考虑了证据之间的冲突程度,又考虑了证据体的不确定性的新模型,在数据波动时能表现出其优异的性能.
4.3 有效性
例3.在多传感器的目标识别中,用5个不同的传感器收集不同类型的数据,识别框架由3个对象组合构成.证据体m3支持命题b发生的概率最高,其他证据体支持命题a发生的概率最高,所以证据体m3与其他证据体形成证据冲突.每个事件中每个数据的基本概率分布函数如表4所示.

表4 例子3的基本概率分布Table 4 Distribution of the mass function for example 3
相较于Yager等人提出的方法,本文所提的方法依然考虑证据体m3能提供有用的信息,只不过将他的权重降低,尽量减少对数据融合的影响.针对这组算例,不同方法的数据融合结果如图3所示.
从图3中可知,在Dempster的组合规则下,目标识别为b,是一个反直觉结果.虽然Y.Deng、Xiao、An等人的方法都是目标识别为命题a,与直觉判断相一致.但是,本文提出的方法对识别目标a的概率高达98.09%,比Yager等人提出的方法提高了66.52%,比Y.Deng等人提出的方法提高了17.07%,Xiao等人提出的方法提高了1.55%,比An[21]等人提出的方法提高了1.04%,进一步提高了对冲突数据的处理效率.
因此,本文所提出的一种新的冲突数据融合方法不仅可以衡量证据之间的冲突程度,而且考虑了证据体的不确定性,结合这两个因子,对证据体的权重进行调整,将可信度低的证据体赋予小的权重,反之,可信度高的证据体赋予大的权重.
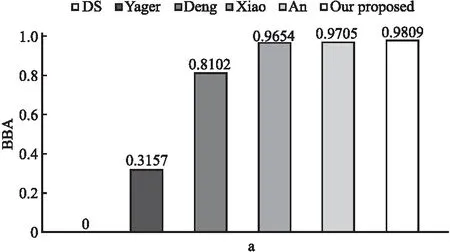
图3 不同方法中事件a的基本概率函数Fig.3 Basic probability function of proposition a in the different methods
再将可信度与原始的BBA矩阵结合,计算加权平均证据,即得到每个事件发生的概率.最后,在k个证据体的情况下,结合Dempster的组合规则下,融合k-1次,得到最终的融合结果.经过上述实验说明,本文所提的方法的新模型对于高冲突证据的融合效果相较于其他方法更好.
5 应 用
将本文所提的方法应用于机器故障领域的一个案例研究,使用Fan[30]中列举的数据与其他方法相比较.
识别框架L中的F1,F2,F3代表机器故障的3种类型.将传感器放在机器的不同位置采集信息,同一时间段内采集到的3种类型数据形成一个证据体,并形成基本概率函数值如表5所示.

表5 故障诊断中的例子Table 5 Application on fault diagnosis
所提方法的具体的计算步骤如下:
步骤1.根据公式(9),证据体mi的相关性矩阵为:

步骤2.根据公式(10),证据体mi的支持度:

步骤3.根据公式(11),证据体mi的可信度:

步骤4.根据公式(8),证据体mi的信息熵为:

步骤5.没有特殊值,所以我们不需要做任何事情.
步骤6.根据公式(12),证据体mi的可信度归一化为:

步骤7.根据公式(13),根据得到的信息熵,修正证据体mi的可信度:

步骤8.根据公式(14),将可信度进行归一化:

步骤9.根据公式(15),计算加权平均证据,即事件发生的概率:

步骤10.将计算得到的加权平均证据根据Dempster组合规则进行2次融合,融合结果如表6所示.

表6 故障诊断的融合结果Table 6 Fusion results of fault diagnosis
从表6中可知,DS判断为事件F2发生的概率最大,与其他方法的判定结果相悖.本文所提方法与Zhang、Xiao、An等人的方法的融合结果一致,并且判断命题F1发生的概率高达91.94%.这比DS证据理论提高了46.75%,比Zhang等人提出的方法提高了25.27%,比Xiao等人提出的方法提高了2.21%,比An等人提出的方法提高了0.94%,而经典的Dempster组合规则的融合结果是反直觉的.这明显能看出本文所提的方法能够有效处理故障诊断中的高冲突数据的融合.
6 总 结
本文提出了一种基于皮尔逊相关系数和信息熵的多传感器数据融合方法.用皮尔逊相关系数表示两两证据体之间的相关性,再用信息熵度量证据体包含的信息量和不确定性,将两者结合得到证据体的可信度,也可说是证据体的最终权重.可信度与原始的基本概率函数矩阵相乘的带加权平均证据,即某一事件发生的基本概率.最后,利用经典的Dempster组合规则进行融合.在上面的目标识别和故障诊断两个案例中,不仅在稳定性方面得到显著的提升,而且进一步提高了分类的精确度.这就表明本文所提的方法更能使用与真实环境,而且有效的避免了高冲突证据在融合时出现反直觉结果和偏见判断.
在未来的工作中,我们计划将这种方法推广到自适应技术和其他的不确定理论中,并在公共数据集中对传感器数据进行融合,验证它的可行性.
