《机器人技术》教学案例库建设与探讨
——以高铁钢轨修磨机器人为例*
2023-05-10广州大学机械与电气工程学院萧仲敏吴文强王建晖唐睿智吴宇深
广州大学机械与电气工程学院 萧仲敏 吴文强 王建晖 唐睿智 吴宇深
作为高校机器人工程专业的专业必修课,《机器人技术》是一门关于研究、设计、制造和应用机器人的重要课程。在机器人工程等专业教学中,建立教学案例,结合实际的机器人技术研发项目,深入工程问题,科教融合,将有助于《机器人技术》等专业课程的教学,同时教学案例库的建设与应用对于机器人工程专业学生实践创新能力的培养与提高具有重要的意义,也可以更好地帮助学生学习理解机器人专业知识[1]。通过具体的教学实施,《机器人技术》教学案例库的建设起到了较好的教学效果。
《机器人技术》是一门关于研究、设计、制造和应用机器人的课程,多学科交叉,主要内容包括机器人结构、机器人运动学、机器人动力学、机器人控制、机器感知、机器视觉、路径规划、轨迹规划等[2]。机器人技术侧重实践[3],主要体现为机器人建模、机器人仿真、离线编程等,因此开展教学案例库建设并将其与《机器人技术》课程相融合是培养理论知识扎实,专业实践能力强的高素质复合型机器人工程类专业人才的有效途径之一[4]。
本文所建设的高铁钢轨修磨机器人技术研发案例,是一个包括机器人设计、编程、规划、控制、传感、应用等机器人核心技术开发的案例,具有很好的教学案例展示效果与学习意义。同时,高铁钢轨修磨机器人研发项目已经成功参加第八届中国国际“互联网+”创新创业大赛,并获得广东省分赛省级铜奖荣誉称号。因此,以该项目为《机器人技术》教学案例库建设内容具有很好的学习价值。
1 《机器人技术》案例库建设内容
教学案例库建设已经被广泛应用于高等教育、职业教育等教学环节中,教学案例库的建设应该体现专业教学的内容与方法改革,除了能反映相关课程的时效性,还应该注重适应时间应用能力和创新能力的培养锻炼[5-8]。
《机器人技术》课程针对机器人工程专业的特点,以工业机器人为研究对象,使学生掌握机器人的基本原理、基本结构、基本控制方式以及最新技术进展,为今后从事机电一体化控制、机器人技术应用的研究工作打下基础,培养学生综合运动机器人技术解决电气领域实际工程问题的能力[9,10]。课程的教学目标是通过课堂教授,使学生掌握从事机器人技术开发与应用所需要具备的运动学/动力学分析、本体设计、制造和控制等专业知识,能用于解决复杂机器人技术工程问题。
基于教学案例库建设的基本要求,根据《机器人技术》课程的教学目标和教学特点,本文对高铁钢轨修磨机器人的开发案例进行了深入发掘和教学设计,从案例的研究背景、技术基础、基本情况、完成情况、学习要点以及案例总结详细地介绍了高铁钢轨修磨机器人这个开发案例,如图1 所示。
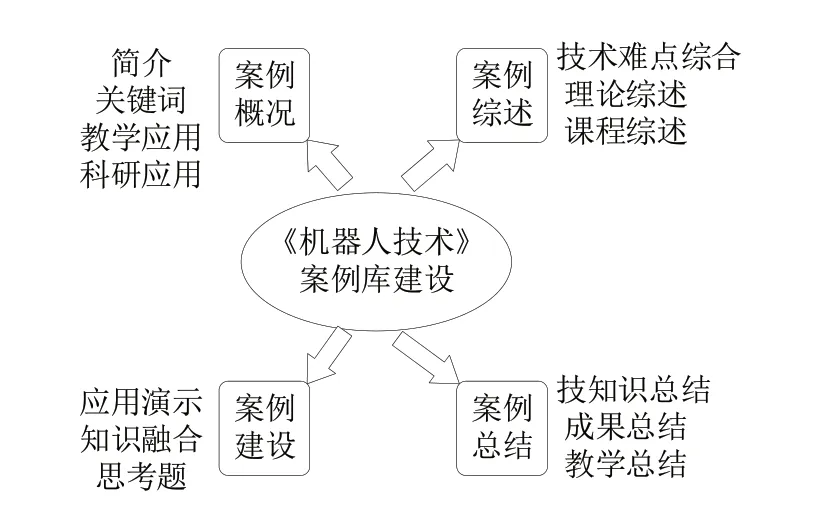
图1 《机器人技术》案例库建设内容Fig.1 Content of case library construction for “Robot Technology”
2 “科教融合”机器人案例库建设
高铁钢轨修磨机器人项目是广州大学与广铁集团合作研发项目,在钢轨焊缝打磨工作中引进新型机器人自动化设备,研发全自动钢轨焊缝打磨机器人系统,将新式自动化和可视化设备融入到传统打磨行业中,实现制造过程全线自动化,无人化生产。该研究旨在建立一套完整的关于机器人钢轨焊缝修磨的传感、规划、控制和应用技术体系,实现了机器换人,其技术难点体现在焊缝识别与检测技术、自动编程与控制技术、机器人轨迹控制算法及柔性加减速以及机器人恒力控制和力/位混合控制等方面。该研究成果荣获2020 年广东省科技进步二等奖。
从案例的核心技术研发内容可以看出,高铁钢轨修磨机器人系统的技术要点符合《机器人技术》的课程教学内容与教学目标,因此可以建立案例技术要点与课程教学计划相对应的案例内容,并将其中的案例技术要点提取出来,形成独立的、专门的教学环节,以此通过实际运用到机器人案例上的技术点来引导学生学习相应的知识点,如表1 所示。
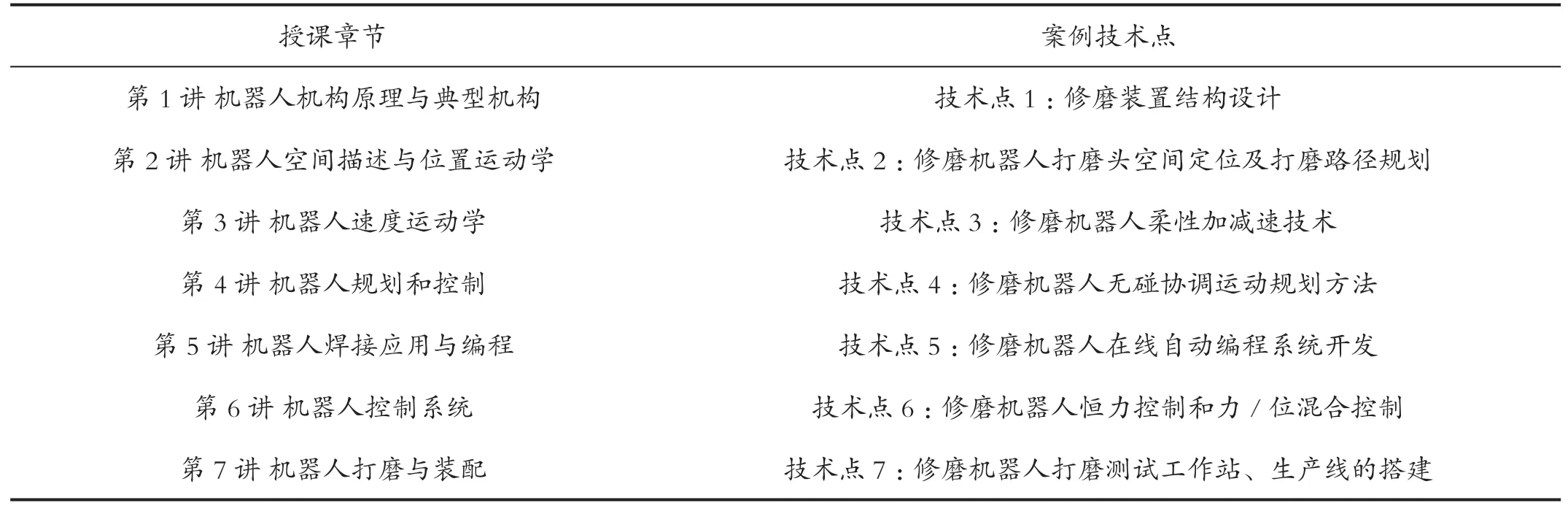
表1 课程与案例结合内容Tab.1 Content of combination of courses and cases
(1)介绍机器人整体结构设计:修磨机器人整体结构由机器人本体与辅助设备构成,如图2 所示。教学过程中将具体分析机器人整体结构和打磨头结构的设计原理。
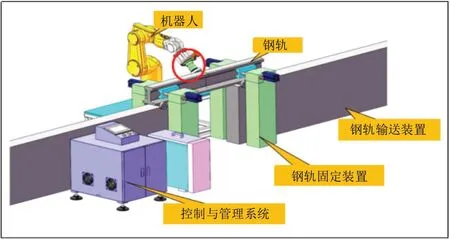
图2 修磨机器人整体结构Fig.2 Overall structure of grinding robot
(2)轨迹规划:轨迹规划模块内容包括机器人运动学、动力学及插补等模块,运算量很大且非常复杂,如何简化处理过程,提高运算效率,保证算法的实时性是该模块实现的难点。因此在案例中所涉及的平滑轨迹规划方法对以直线、圆弧为主的机器人空间轨迹进行平滑规划,以解决机器人轨迹停顿、不流畅、抖动、偏离路径、超速等问题,进一步提升机器人运动的效率和平稳性。
(3)柔性加减速技术:修磨机器人采用摆线加减速规划方法,使用简化的正弦曲线或余弦曲线加减速模型,其完整的加减速过程分为加加速、减加速、匀速、加减速、减减速5 个阶段,相对S 曲线加减速,该方法具有加加速度连续、计算简单等优点。
(4)无碰协调运动规划:提出了多种基于任务的多机器人无碰协调运动规划的方法。相比于传统概率路径地图规划法造成路径冗余和产生离散路径点,案例提出的基于构型空间与空间资源分配规划法能产生优化的路径,实现连续的操作任务。
(5)在线自动编程系统:基于SolidWorks 三维建模软件和Visual Studio 开发平台,结合钢轨及其焊缝的形貌特征,开发一款提高机器人修磨焊缝程序的编写效率、解决复杂曲面离线编程困难的问题、便于和CAD/CAM系统集成,做到CAD/CAM/Robotics 一体化的高铁钢轨焊缝修磨机器人自动编程系统的实现方案,如图3 所示。

图3 高铁钢轨焊缝修磨机器人自动编程系统方案Fig.3 Scheme of automatic programming system for highspeed rail welding seam grinding robot
(6)机器人恒力控制:研究机器人力/位混合控制技术、力反馈阻抗控制技术,提出基于位置与速度的联合控制方法。结合钢轨修磨的实际情况,在经典的阻抗控制方案加入期望力信息,并将接触力的大小进行重力补偿,建立通过末端位移来修正力的阻抗控制模型。
(7)修磨机器人工作站:设计并组建机器人焊缝粗磨生产线,对焊缝检测技术、自动编程技术、运动规划技术和打磨力控技术等进行测试实验,并投入实际生产,是全国第一条机器人打磨钢轨焊缝生产线,系统总体运行情况良好,稳定,打磨质量已取得铁科院的质量检验认证,通过对打磨后钢轨表面误差测量,打磨效果也比较好,误差可控,精度满足要求。
3 教学效果体现与总结
借助教学案例库建设的机会,高铁钢轨修磨机器人项目已经在课堂上通过讲授、视频等方式介绍给机器人工程专业学生认识、研究与探讨。同学们也对案例里面涉及的知识点表示出极大的兴趣,并根据自身的想法提出一些较有意义的创新点,这也促进了高铁钢轨修磨机器人项目的深入研究与改进。
同时经过具体的教学实施,《机器人技术》案例库的建设,不仅丰富教学内容、提高教学质量,而且能够通过引进机器人产品、组建机器人实验室来强化基础条件,让学生理论知识与实际操作相结合,提高能力培养的有效性。《机器人技术》案例库的建设能够帮助学生开阔自己的学习领域,研究探讨更深层次的知识,形成自己的学习模式和学习网络,同时可以建立更加优良、开放性更好的学习平台,将更多的优质教学资源传授于学生,促进学生全方位发展。
